导读:本期主要介绍电流型磁链观测器(current flux observer)在不同坐标系下的表现形式,应用在异步电机矢量控制系统中。
一、引言
磁链估计是高性能交流感应电机调速系统中的重要组成部分。而磁链在实际应用中一般不用传感器直接检测,所以现代交流电力传动控制系统常用磁链估计模型来估算磁链。在电机运行过程中,要考虑磁饱和、温度等干扰信号对电机参数造成偏差的影响,所以如何在电机全速范围内获得准确的磁链即提高磁链观测器的参数鲁棒性成为众多学者的研究内容。
转子磁链观测器利用定子电压、定子电流或转子转速信号观测出转子磁链的相位和幅值。如果转子磁链的相位观测不准,那么定子电流的励磁分量与转矩分量就不能实现完全的解耦,可能会造成系统的振荡甚至不稳定。如果观测出转子磁链的幅值偏大,会使得电机运行在弱磁状态,减小电机的带载能力;如果观测出转子磁链的幅值偏小,会导致过大的励磁电流,使电机的铁心饱和,严重时还会导致绕组过热而烧坏电机。因此决定整个矢量控制系统性能优劣的最为关键环节就是转子磁链观测器。
二、不同坐标系下的电流型磁链观测器
根据描述磁链与电流的关系的磁链方程来计算转子磁链,所得的模型叫做电流模型。电流模型可以在不同的坐标系上获得。
2.1 在两相静止坐标系下的电流模型
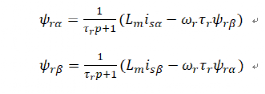
在两相alpha、beta坐标系下的电压方程:

由上可以得到静止坐标系下的基于电流模型的转子磁链向量表达式如下(标量形式):
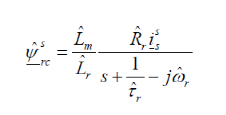
也可以表达成静止坐标系下的复矢量形式:
 2.2 在两相旋转坐标系下的电流模型
2.2 在两相旋转坐标系下的电流模型
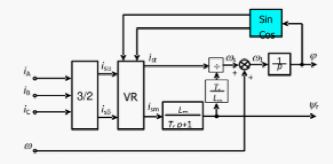
图2 两相旋转坐标系下的电流型转子磁链观测器模型
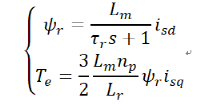
相关公式如下:
 三、不同坐标系下的电流型磁链观测器仿真实现
3.1、静止坐标系下的电流型磁链观测器(标量形式)
三、不同坐标系下的电流型磁链观测器仿真实现
3.1、静止坐标系下的电流型磁链观测器(标量形式)

图3 电流型磁链观测器模型(标量)

图4 波形变化情况
3.2、静止坐标系下的电流型磁链观测器(复矢量形式)

图5 电流型磁链观测器模型(复矢量)
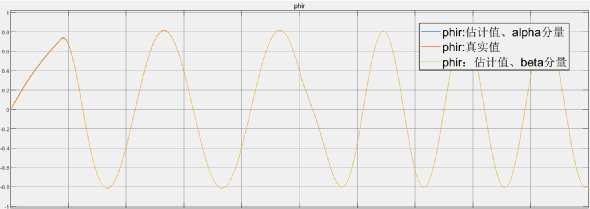
图6 波形变化情况
3.3、旋转坐标系下的电流型磁链观测器
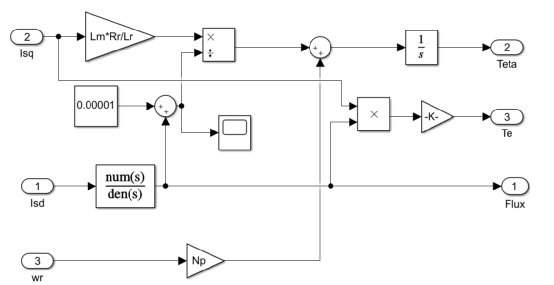
图7 电流型磁链观测器模型
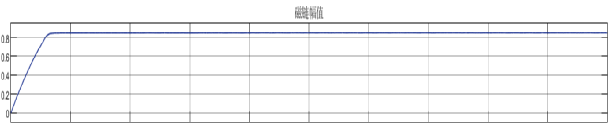
图8 波形变化情况
 |手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 )
|手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 ) 基于电流型磁链观测器的异步电机矢量控制学习w4.jpg
基于电流型磁链观测器的异步电机矢量控制学习w4.jpg