1.定义&分值分配
2.驾驶员监控
3.驾驶控制
1.定义&分值分配
由前文《ENCAP2026对乘员监测的要求(上)》可知,在ENCAP2026的安全行驶Safe Driving满分100分,分为乘员监测(30分)、驾驶员在环评估(30分)、车辆辅助(40分)三部分。
| 安全驾驶测试项 | 分数 |
| 驾驶员在环评估 | 30 |
| 驾驶员监控 | 25 |
| 瞬态 | 15 |
| 非瞬态 | 10 |
| 驾驶控制 | 5 |
“自适应巡航控制Adaptive Cruise Control(ACC)”是一种控制车速的系统,控制车速的同时可以保持与前方车辆的设定距离。
“车道居中Lane Centering(LC)”通过影响车辆的横向运动,帮助驾驶员将车辆保持在所选车道内的功能。
“驾驶员状态监控Driver State Monitoring(DSM)”驾驶员状态监控系统,可以确定驾驶员的状态。
“直接监控Direct Monitoring”其中驾驶员状态确定由直接观察驾驶员的传感器(摄像头)支持。

“间接监测Indirect Monitoring”通过直接观察驾驶员的传感器以外的手段(例如转向输入)间接实现驾驶员状态确定。
“瞬态状态Transient state”驾驶员对驾驶/控制车辆的主要任务的注意力暂时降低,但可以立即逆转的状态(例如,由于从事观察后视镜、仪表等次要任务而导致的视觉注意力不集中)。
“长时间分心Long Distraction”一种单一的使驾驶员目光远离前方道路视野的长时间分心。
“短暂分心Short Distraction/视觉注意力时间共享Visual Attention Time Sharing (VATS)”重复的短暂凝视非前方道路视,这种情况的累积会降低驾驶员对驾驶情况的认知。直到驾驶员的注意力重新回到驾驶任务上足够长的时间,以便他们充分评估驾驶情况,认为短暂分心结束。
“手机使用Phone Use”短暂分心(VATS)的一个子集,与驾驶任务共享驾驶员注意力的对象是他们的手机。

“非瞬态状态Non-transient state”一种状态,部分或完全降低了驾驶员保持注意力和正确执行驾驶任务的能力,并旦在驾驶期间没有适当的恢复时间就无法逆转(疲劳、瞌睡,需停车休息)。
“驾驶受损Impairment”驾驶受损会对驾驶表现产生负面影响,导致事故风险增加。驾驶受损可能会随着时间的推移而积累(与疲劳相关,如变为嗜睡/困倦),也可能在旅程一开始就出现了(与疲劳无关,如使用合法/非法药物)。
“微睡眠Microsleep”微睡眠是疲芳积累后的暂时睡眠,可能持续几秒钟。
“睡眠Sleep”在这种评估中,睡眠被认为是当驾驶员因疲劳而处于昏迷状态超过几秒钟时。
“无反应驾驶员Unresponsive Driver”驾驶员在驾驶过程中变得无反应,可能是由于突发疾病或极度疲芳。

“受损驾驶时车辆反应Impaired driving vehicle response”驾驶员被归类为受损后的警告和/或干预车辆响应。
“受损驾驶警告Impaired driving warning”在系统确定受损驾驶员的情况下发出警告。
“高灵敏度模式High sensitivity mode”安全辅助系统(FCW/LDW/AEB/LDP等)的更敏感和更早的警告和/或干预,以补偿驾驶员受损状态。

“猫头鹰式运动Owl type movement”视觉注意力从道路和面向前方的位置转移,主要是通过头部旋转,然后是眼睛来实现的。

“蜥蜴式运动Lizard type movement”一种运动,驾驶员主要通过将视线从道路上移开,头部/面部保持向前的位置来专注于一项任务。
“退化的系统Degraded system”当子系统完全不可用时,直接驾驶员监控系统被认为是退化的。例如,如果眼动跟踪完全不可用,则使用头部姿势跟踪和眼动跟踪的直接驾驶员监控系统将被视为退化,从而阻止系统识别任何蜥蜴式运动(如驾驶员带墨镜🕶️,导致无法判断蜥蜴式运动)。
“不起作用的系统Non-functional system”当整个系统完全不可用时,直接驾驶员监控系统被认为不起作用(如摄像头遮挡故障)。
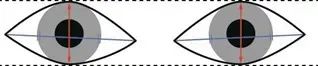
“眼睑孔径Eye lid aperture”从连接驾驶员眼睛外角和内角的线段中点沿y轴方向绘制的直线与上眼睑下边缘和下眼脸上边缘重叠的点之间的距离。在驾驶员清醒和注意力集中时测量。
“车载信息娱乐in-vehicle infotainment (IVI)system系统”包含信息娱乐系统和/或车辆控制的区域,通常位于传统乘用车布局中前排座位的中央。
“紧急功能Emergency Function(EF)”在驾驶员失去反应的情况下:
(a)可以自动减速并将车辆安全停车;或
(b)速度降到10km/h以下,同时保持与前方车辆的距离并保持在其车道内。
目标停车区域可以是原始车道、较慢的行驶车道、硬肩或紧急区域。
2.驾驶员监控
| 驾驶员监控评估 | 25 |
| 瞬态驾驶员状态 | 15 |
| 长时间分心 | 5 |
| 短时间分心 | 5 |
| 电话使用 | 5 |
| 非瞬态驾驶员状态 | 10 |
| 驾驶受损 | 4 |
| 微睡眠 | 2 |
| 睡眠 | 2 |
| 无反应 | 2 |
驾驶员状态监控为自主申报得分,提供文档自证。ENCAP秘书处将审查车辆制造商提供的驾驶员状态监控DSM文档,并要求测试实验室在授予积分之前抽查几种瞬态、非瞬态和无响应的驾驶员情况。现场测试的规定将在2025年更新的TB039文档中提供。
2.1 一般要求
要在驾驶员监控中获得积分,应满足以下条件:
(a)DSM系统应在每次行程开始时默认开启,并且不能通过短暂的单次按下按钮来停用系统。
(b)驾驶员状态检测灵敏度不得手动调节。
(c)DSM系统应持续监测驾驶员状态,为使系统开始测量驾驶员状态,允许以至少10km/h的前进速度行驶1分钟。
(d)对于分心、微睡眠、睡眠和无反应的驾驶员状态,车辆至少应在20km/h的前进速度或最低操作速度下进行警告和/或干预。对于受损驾驶员状态,当车辆以至少50km/h的速度前进时,为了检测这些受损状态,每次旅程开始时允许最多10分钟的学习时间(学习驾驶员驾驶习惯/驾驶员眼睑大小自适应)。
(e)如果车辆提供辅助驾驶系统作为选配或标配,该系统应根据ENCAP2026中的驾驶辅助要求,分别满足驾驶协作和驾驶员监控的最低分数50%,以防止过度依赖。
(f)对于车辆制造商期望得分的任何驾驶员状态,这些瞬态和非瞬态类型场景的真阳准确率TPR阈值应在下表中规定的阈值之内或之上。
(g)在日常实际驾驶环境中,DSM系统应满足用户接受的最低水平。这应按照ENCAP VSSTR指南进行评估。
真阳TP:DSM系统和驾驶员均正确识别为受损;
假阴FN:DSM系统预测驾驶员非受损,而驾驶员实际上是受损的;
假阳FP:DSM系统预测驾驶员受损,而驾驶员实际上不受损;
真阴TN:DSM系统和驾驶员均正确识别为不受损;
| 瞬态类型 | 分心场景 | 分心行为 | 受试者分心行为真阳率TPR的平均值 |
| 85%阈值 | 100%阈值 | 报告成绩 |
| 长分心 | 非驾驶任务 | 猫头鹰 | 80 | 90 | |
| 蜥蜴 | 80 | 90 | |
| 身体倾斜 | 80 | 90 | |
| 驾驶任务 | 猫头鹰 | 80 | 90 | |
| 蜥蜴 | 60 | 80 | |
短分心
(VATS) | 驾驶任务 | 猫头鹰 | 60 | 70 | |
| 蜥蜴 | 60 | 70 | |
| 非驾驶任务 | 猫头鹰 | 60 | 80 | |
| 蜥蜴 | 60 | 70 | |
| 多目标 | 蜥蜴 | 60 | 70 | |
| 电话使用 | 基础 | 猫头鹰+蜥蜴 | 60 | 70 | |
| 高级 | 蜥蜴 | 60 | 70 | |
| 非瞬态类型 | 子类别 | 可用积分 | 受试者非瞬态行为真阳率TPR的平均值 |
| 85%阈值 | 100%阈值 | 结果 |
| 受损驾驶 | 疲劳 | 2 | 40 | 60 | 70 |
| 非疲劳 | 2 | / | / | 22 |
| 微睡眠 | / | 2 | 40 | 50 | 45 |
| 睡眠 | / | 2 | 40 | 50 | 50 |
| 无响应驾驶员 | / | 2 | 80 | 90 | 90 |
2.1.1 噪声变量(鲁棒性)
一个具有鲁棒性的DSM系统应能涵盖各种各样的驾驶员、遮挡和驾驶行为,以提供最高的社会安全效益。
要在DSM评估中获得积分,应涵盖下列每个驾驶员、遮挡和驾驶行为的整个范围。
车辆制造商应通过档案证明DSM系统符合性能要求。
a.驾驶员
| 类别 | 噪声变量 | 范围/元素 | 性能要求 |
| 驾驶员 | 年龄 | 青年(16-18)~老年(80) | 功能正常 |
| 性别 | 男、女 | 功能正常 |
| 身材 | AF05~AM95 | 功能正常 |
| 肤色 | Fitzpatrick皮肤类型1~6或其他分类 | 功能正常 |
| 眼睑孔径 | 6mm~12mm | 功能正常 |
不同身材的驾驶员对应不同的座椅位置,使任何身材的驾驶员都能正确执行驾驶任务,即能接触到踏板和方向盘,能看清前方道路。
<div class=""> AF05:第5百分位成年女性(身高153cm,体重49kg)。
根据您的需求,我为您提供关于“ENCAP2026对驾驶员在环的要求(上)”中第一部分关于驾驶员在环的定义与分值分配的专业回复:<br><br>驾驶员在环评估是ENCAP2026安全行驶标准的重要组成部分,其满分值为30分。该部分主要关注驾驶员的监控与驾驶控制,强调驾驶员对于车辆的控制能力和环境感知能力。具体包括:<br><br>一、定义:驾驶员在环评估旨在评估驾驶员在车辆行驶过程中的操作能力及对环境的感知与反应能力。<br>二、分值分配:该部分分为驾驶员监控和驾驶控制两个子项。其中,驾驶员监控占据较大分值(约为25分),主要考察驾驶员对车辆状态的监控以及对突发情况的应对能力;驾驶控制部分(约5分)则主要评估驾驶员对车辆的操作技巧与稳定性。<br><br>关于自适应巡航控制(ACC),它是一种先进的驾驶辅助功能,能够在控制车速的同时,保持与前方车辆的设定距离,对于提升驾驶安全与驾驶舒适性具有十分重要的作用。在驾驶员在环评估中,ACC系统的性能与表现也是重要的考察内容。<br><br>[内容由汽车工程师之家人工智能总结,欢迎免费使用,见贴尾]
 |手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 )
|手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 ) ENCAP2026对驾驶员在环的要求(上)w1.jpg
ENCAP2026对驾驶员在环的要求(上)w1.jpg