0.前言
2020年9月,大陆发布成像毫米波雷达ARS540,从此,雷达进入4D成像时代。由于能够生成相对密集的点云,毫米波雷达能够更精细的刻画周围环境。在之后相当长的一段时间里,4D成像毫米波雷达成为自动驾驶开发圈讨论的热点。
不过,由于成本较高,再加上另一个“更红的”明星同一时间冉冉升起,在之后的2年里,4D成像毫米波雷达除了在宝马、飞凡R7、路特斯等少量车型上量产之外,并没有人们当初想象中的那样大规模上车,一时显得有些冷落。
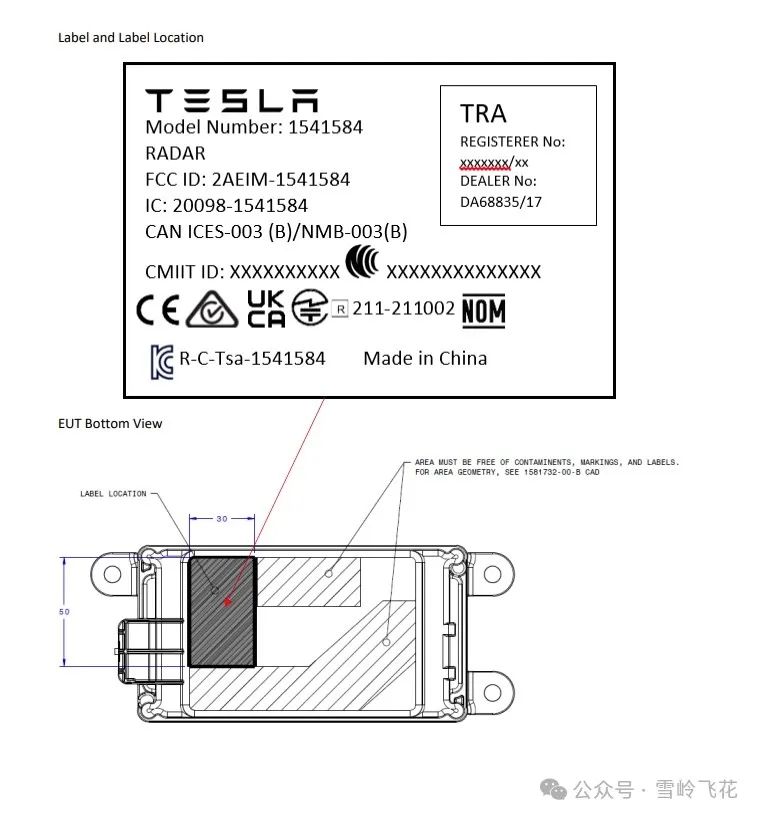
时间来到2023年2月22日,在毫米波雷达圈突然传出了一个爆炸的新闻。特斯拉全新 HW4.0 电脑板被推主Greetheonly曝光,显示新增的以太网接口预计将接入 4D 毫米波雷达。结合此前特斯拉向 FCC 递交的 4D 毫米波雷达文件,市场预测特斯拉新款 Model 3 或标配 4D 毫米波雷达。
作为自动驾驶风向标的特斯拉也开始使用4D毫米波雷达的消息,使得4D雷达又被拉回到公众视野,甚至一时间,“4D成像毫米波雷达能否取代激光雷达”的讨论,不绝于耳。
笔者根据多年的工作经验以及网络公开资料,通过本文,简要梳理一下4D成像毫米波雷达的优劣势,系统方案,以及国内外主要的4D毫米波雷达产品及其特点。
定义:
本文提到的“4D雷达”,“4D毫米波雷达”,“4D成像雷达”和“4D成像毫米波雷达”是同一个概念,均是指含有6T8R及以上物理通道,水平角分辨率和水平角分辨率≤2°,点云密度≥3万/秒的毫米波雷达。例如,Conti ARS540,BOSCH FR5CU,ZF FRGen21,Aptiv FLR7HD等;
一般毫米波雷达:不具备很高俯仰测角分辨率的、点云密度在4000点/秒以下的“3D”毫米波雷达,例如BOSCH FR5CP,Conti ARS410等;
激光雷达:目前主流的半固态前向长距主激光雷达,例如禾赛AT128,速腾M1P等;
一、4D毫米波雷达的实现原理
1. 4D成像毫米波雷达的优势
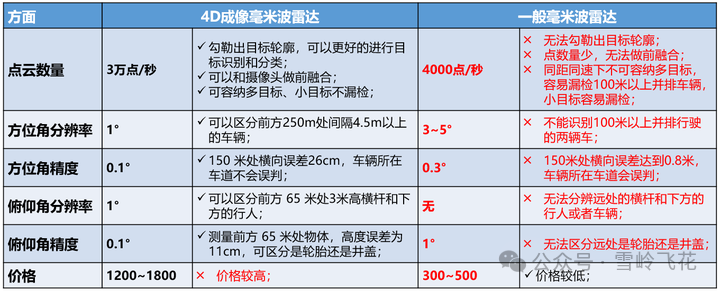
1.1 4D成像毫米波雷达 vs 一般毫米波雷达
4D成像毫米波雷达性能整体超越一般毫米波雷达,但是成本较高。其中,较高数量的点云密度、较高的角度分辨率和高度测量能力,使得4D成像毫米波雷达可以大幅扩展应用场景。两者性能对比如下表所示:
1.2 4D成像毫米波雷达 vs 激光雷达
4D成像毫米波雷达和激光雷达的对比,汇总如下表所示:
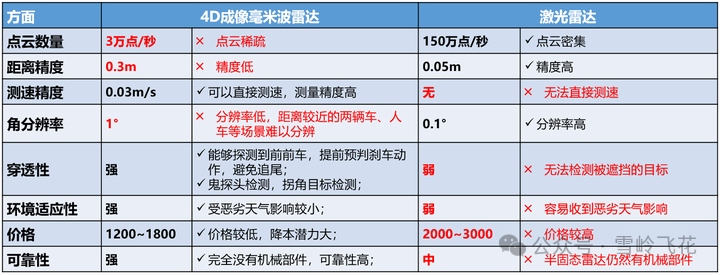
其中,4D成像毫米波雷达的点云密度基本与32线激光雷达相当,与目前主流的百线以上激光雷达差距较大。
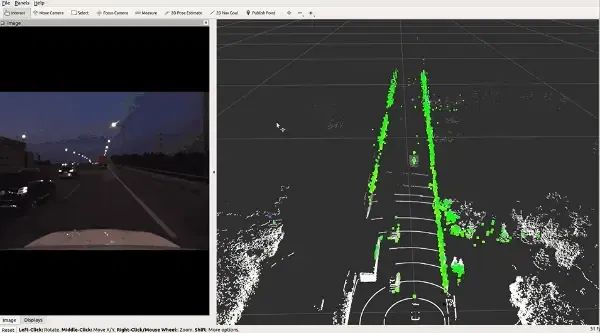
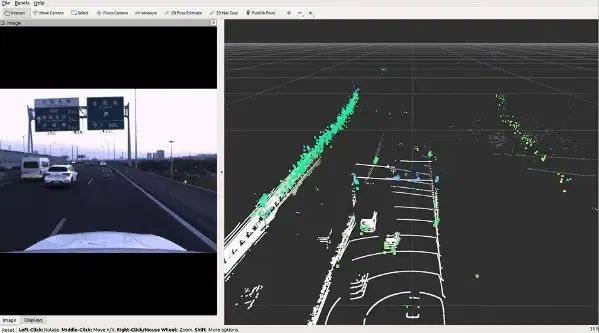
激光雷达和4D成像毫米波雷达点云对比效果如下,其中白色点是激光雷达,绿色点是4D毫米波雷达(来源:TJ4DRadSet数据集)
《4D Millimeter-Wave Radar in Autonomous Driving A Survey》中对于4D毫米波雷达和激光雷达的对比:
受限于两者探测原理不同,4D成像毫米波雷达在点云密度指标上不可能和激光雷达相比,但是在测距、测速、穿透性、环境适应性等方面有独到的优势。
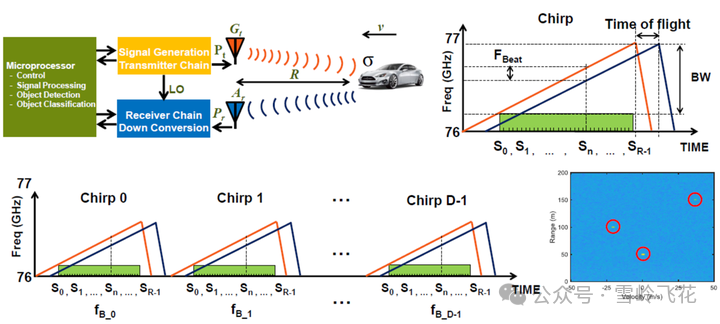
2. 4D成像毫米波雷达的系统方案
2.1 雷达方程
根据雷达方程,毫米波雷达关键指标的影响因素如下:
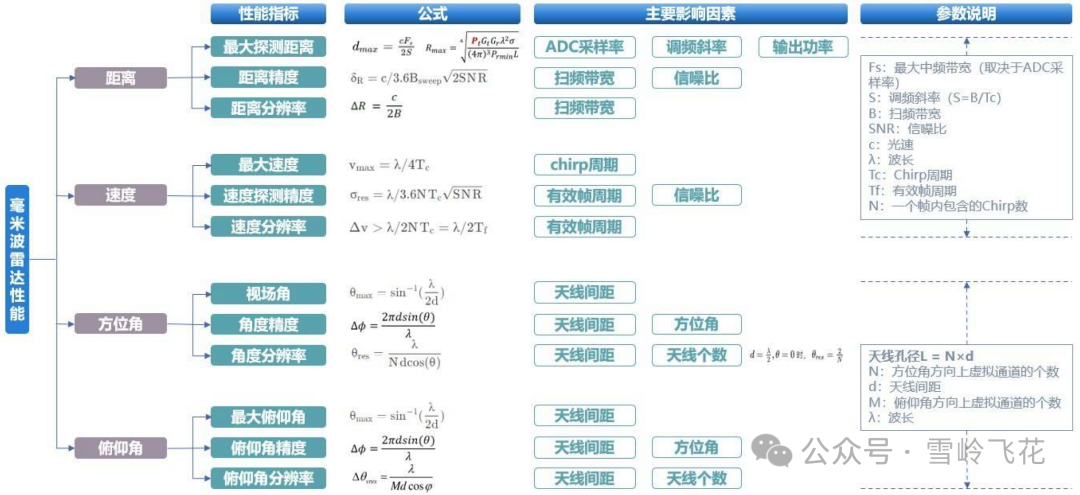
资料来源:CSDN
可以看出,提升测距和测速性能,主要是提升带宽和优化调制方式。而提升角度性能,主要依靠提升天线孔径。前者相对容易,而后者则是4D成像雷达的设计关键。
如何增大天线孔径呢?
一种方案是增大天线物理尺寸,雷达尺寸越大,孔径越大,例如“大锅盖”机械扫描雷达:

汽车显然不可能顶着一个“大锅盖”行驶。
当然,也不是说绝对不行,比如1970年代顶着大锅盖雷达的实验汽车。这种车如果放在现在,回头率应该老高了。。。。(当然1970年回头率也高。。)

所以,对于车用雷达,在增大天线孔径的同时,还要保证体积尽量小。
目前车载毫米波雷达大多是使用印刷在电路板上的微带天线,这种雷达3dB波束宽度,基本都在30-60°之间。
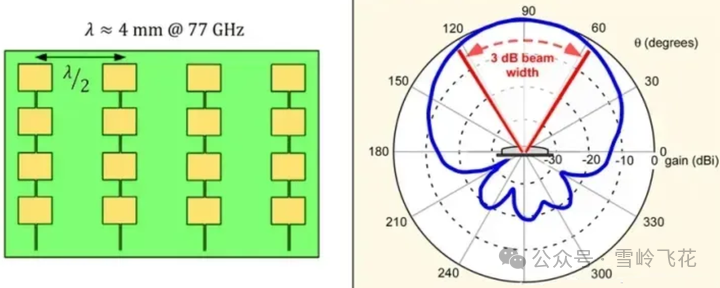
那么如何在这么大的波束宽度情况下,来实现精确测角呢?
这就是第二种方案:MIMO技术。
2.2 通过MIMO提升角分辨率
根据角分辨率公式:

其中:
波长λ越小,角度分辨率越高。目前77/79GHz雷达取代24GHz雷达就有部分这个原因。
采样的通道个数m越多,分辨率越高。
接收天线阵元之间的距离L越大,分辨率越高。
θ越小时(例如天线正前方),其分辨率越高,θ越大时(例如FOV边缘),分辨率越低。
由于λ和θ一般不会调整,因此,提升角分辨率主要依靠增大m和L,即雷达孔径。由于增加L会使得视场角FOV的减小,如前所示,最大检测角度为:

因此,增大孔径更多的是依靠增加通道个数m,这就是MIMO(多输入多输出,Multi-input Multi output)。
MIMO的核心思想是采用不同位置的收发单元进行多次测量,通过接收信号的差异解算角度。MIMO雷达拥有多个发射天线(例如a个)和多个接收天线(例如b个),即生成一个 m = a × b的虚拟天线阵列,可以实现较大的虚拟孔径。a个天线发射相互正交的信号,多波形信号在空间保持独立。b个接收天线采用a个匹配滤波器对回波进行匹配,从而可以得到m = a × b个通道的回波数据。
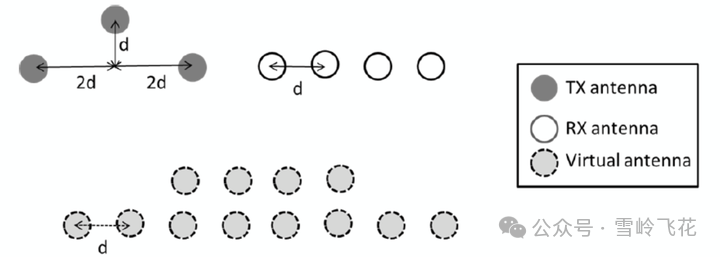
MIMO雷达通过采用稀疏布阵,实现较大的虚拟孔径,从而大幅提升角分辨率。
如下是TI测试的多片级联雷达(MIMO)的FFT输出图,可以看到,通道数越多,峰值越尖,精细程度就越高,角分辨率越高。
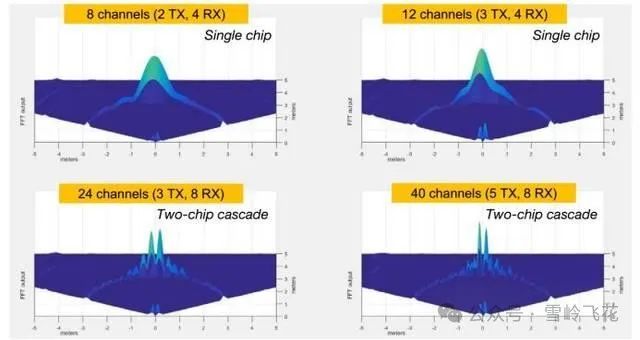
图片来源:TI
2.3 4D毫米波雷达的常见方案
目前市面上有很多采用MIMO技术的4D成像毫米波雷达,通道数从12个到2304个不等,如下图所示。
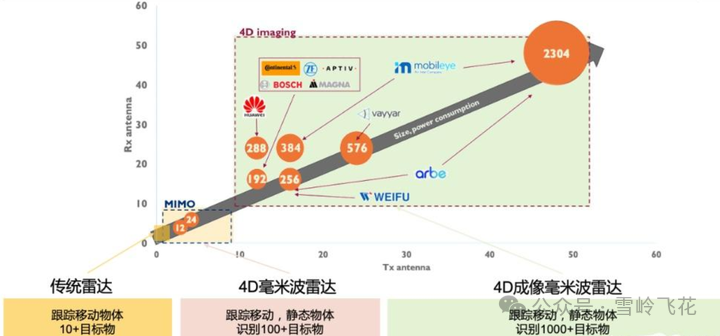
其中,从硬件层面的实现方案主要有2种:
方案1:多MMIC级联
使用多片MMIC级联,例如2级联、4级联或者8级联等,通过特殊的软件算法和天线设计,实现高倍数的虚拟MIMO,通过增大的虚拟孔径,大幅提升角分辨率。
使用该方案的企业很多,包括大陆、博世、采埃孚、华为、森思泰克等。例如大陆ARS540雷达:
该方案的优势是:
技术成熟度高,产品稳定性好;
前期开发难度低,上市周期短;
该方案的劣势是:
成本较高,功耗较高,尺寸大;
由于级联络线不可持续,无法通过更多芯片堆叠的方式,继续提升产品性能;
方案2:专用芯片组
研发新的芯片组,将多发多收MMIC和处理器集成在一套专用的芯片组中。采用该方案的代表企业:Arbe、Uhnder、Vayyar、Mobileye等。

该方案的优势是:
集成度高,尺寸小;
可以实现更加灵活的调制方式和架构,能够实现更大的雷达孔径,性能更高;
该方案的劣势是:
芯片集成度高,通道串扰、散热等挑战更大;
技术成熟度低,芯片开发周期长,迭代节奏慢;
二、国外传统4D毫米波雷达
这类产品是指采用“方案1:多MMIC级联”的国外品牌传统毫米波雷达。
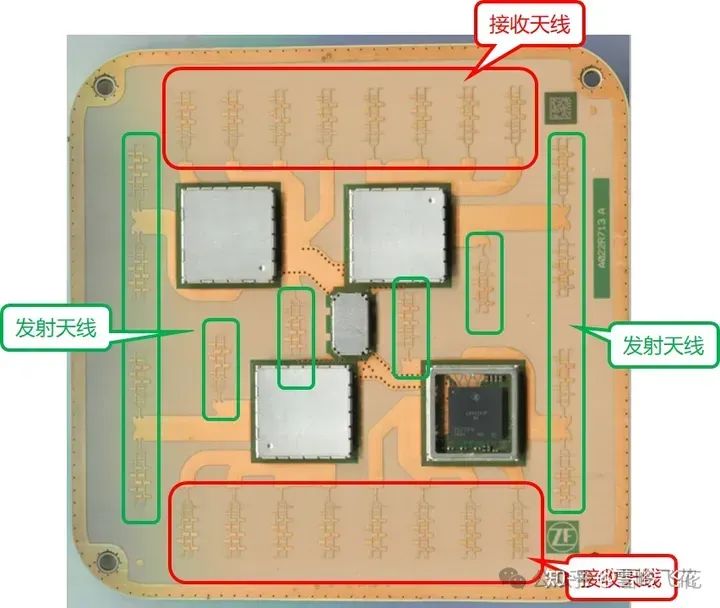
1. 大陆:ARS540
ARS540是大陆第五代长距雷达的高配版本,在宝马的 iX 纯电动 SUV上量产。

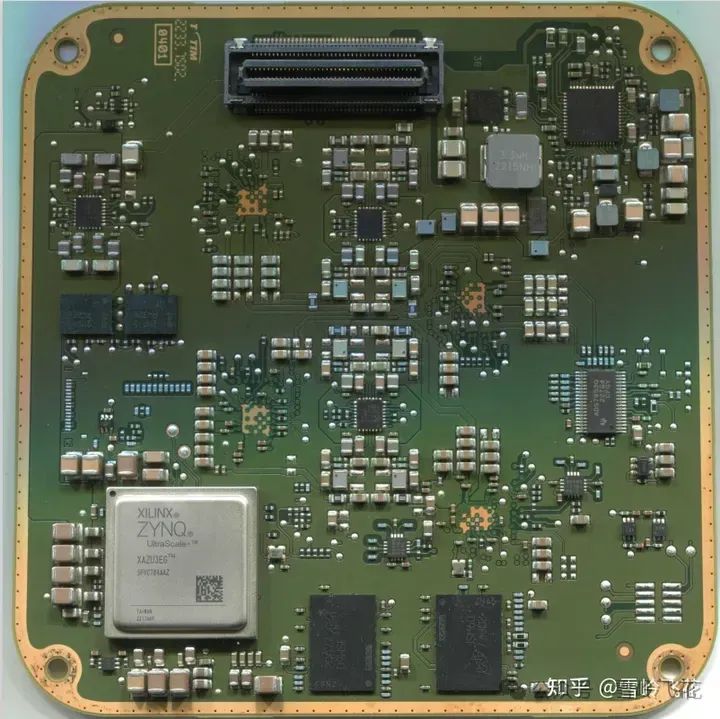
MMIC:4*MR3003(NXP),12T16R,腔体波导天线,处理器:XAZU5E

 性能指标
性能指标
距离(范围、精度、分辨率):300m,0.15m,0.22m
速度(范围、精度、分辨率):-400~+200kph,±0.1kph,0.35kph
水平角(范围、精度、分辨率):±50°,±0.1°~±0.5°,1.2°~1.68°
俯仰角(范围、精度、分辨率):±9°,±0.1°,2.3°
ARS540是全球第一款采用波导腔体天线的4D成像毫米波雷达,这种天线的优势是可以增大辐射效率,提高探测距离,缩减雷达面积。不过,这种天线对于加工精度要求高,成本高。

图片来源:赵孔瑞
ARS540具备192个虚拟通道,其等效面阵和雨天感知效果如下:
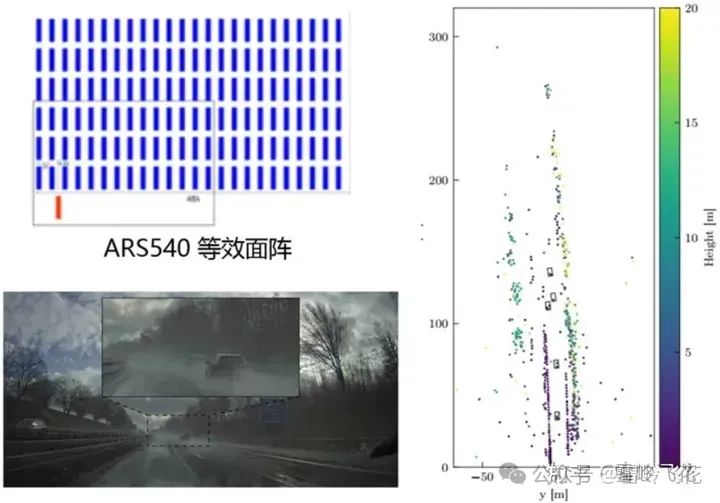
图片来源:叶融茶归
2. ZF:FRGen21
采埃孚的FRGen21 Premium雷达,在飞凡R7首发量产。
MMIC:4 * AWR2243P,12T16R,微带阵列天线。
处理器:XAZU3EG
 性能指标
性能指标
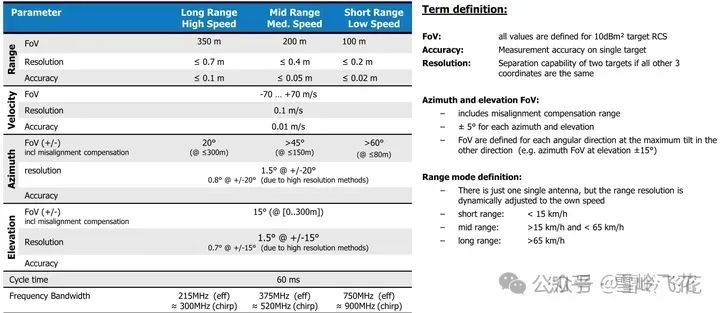
结构方案
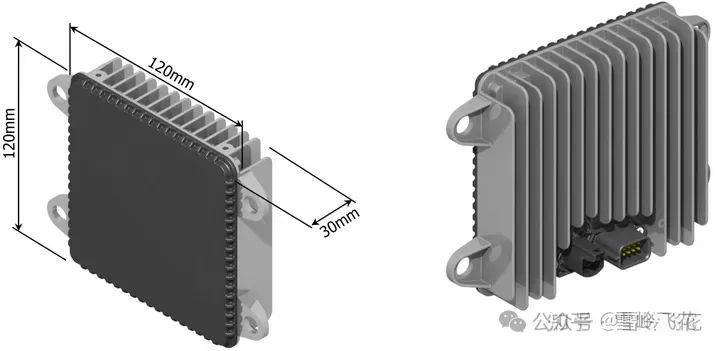
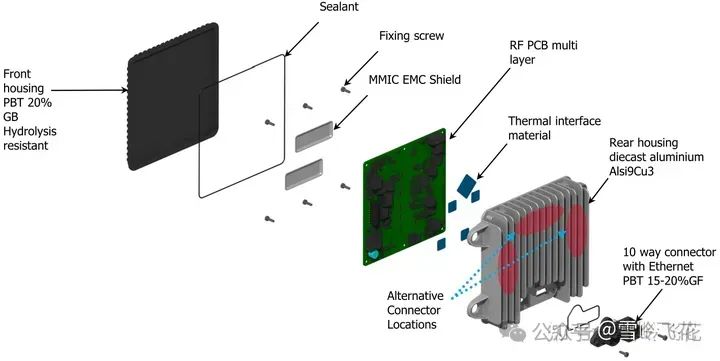
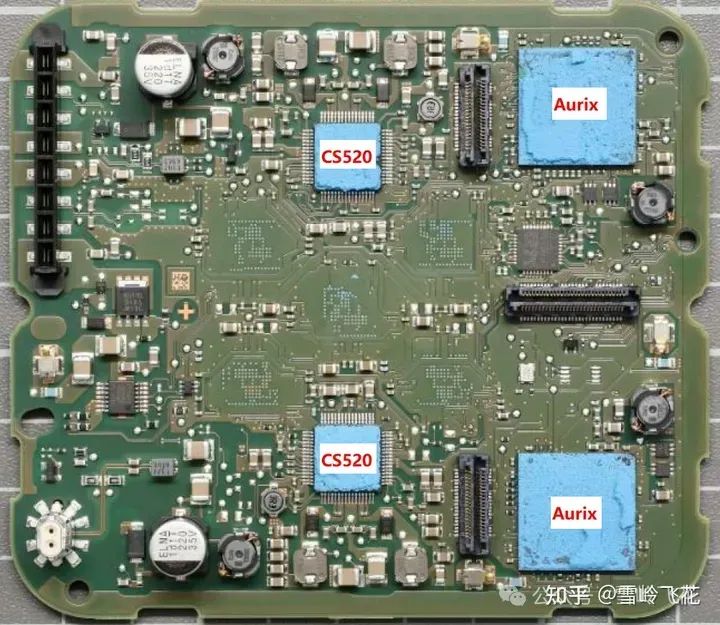
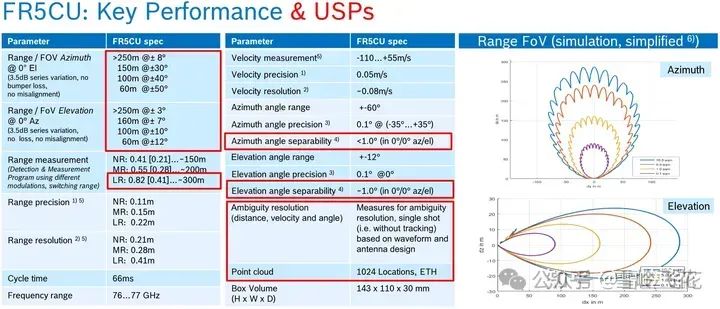
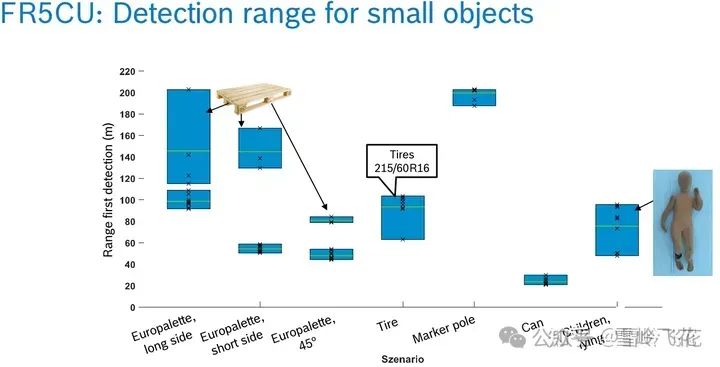
 3. BOSCH:FR5CU
MMIC:5 * RXS8160PL(Infineon SiGe BICMOS),8T16R,微带梳状天线。
3. BOSCH:FR5CU
MMIC:5 * RXS8160PL(Infineon SiGe BICMOS),8T16R,微带梳状天线。
处理器:2 * TC397(Aurix-2G,L- / XL-Device),
电源:2 * RB System ASIC CS520
 性能指标
性能指标
BOSCH使用Infineon SiGe BICMOS MMIC,相对于比TI的RFCMOS芯片,Infineon的SiGe BICMOS具备更高的发送功率,更低的接收噪声,以及更好的信噪比。
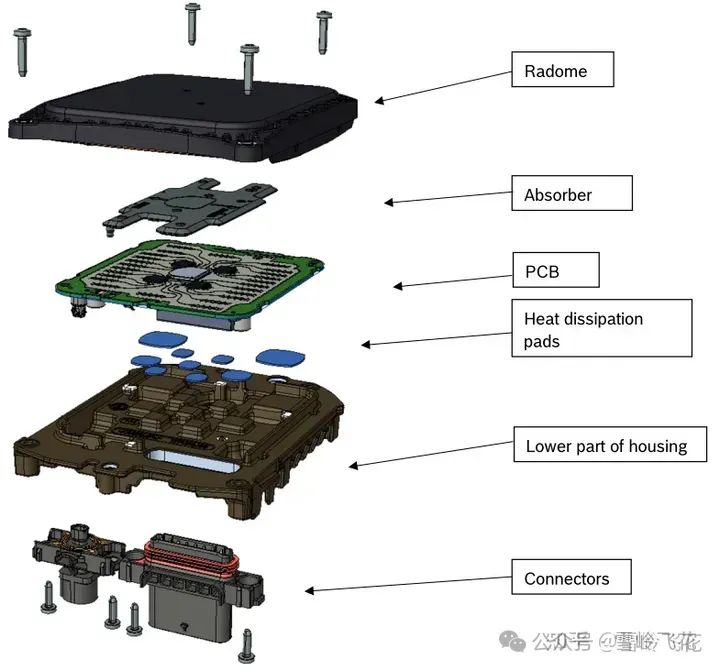
 结构方案
结构方案
接插件: 8 Pins (AK2) + 2 Pins (H-MDT,以太网接口)

 4. 安波福:FLR4+和FLR7HD
4. 安波福:FLR4+和FLR7HD
FLR4+是2级联版本,FLR7HD是4级联版本。
MMIC:2 * TEF8232,4 * TEF8232,空气波导天线(SIW缝隙天线)
处理器:S32R45
 性能指标
性能指标
FLR4+:
距离(范围、精度、分辨率):300m, ±0.12m, 0.2m
速度(范围、精度、分辨率):30m/s, ±0.05m/s, 0.07m/s
俯仰角(范围、精度、分辨率):±15°, ±0.5°, 2.4°
水平角(范围、精度、分辨率):±60°, ±0.2°, 1.4°
FLR7HD:
距离(范围、精度、分辨率):366m, ±0.06m, 0.15m
速度(范围、精度、分辨率):30m/s, ±0.05m/s, 0.06m/s
俯仰角(范围、精度、分辨率):±22°, ±0.2°, 1.3°
水平角(范围、精度、分辨率):±60°, ±0.1°, 0.8°
安波福4D毫米波雷达采用了空气波导天线,空气波导天线也是波导天线的一种。类似于大陆ARS540采用的腔体波导天线,空气波导天线也有更大的辐射效率,可以实现更小的雷达体积,制造成本也较高。
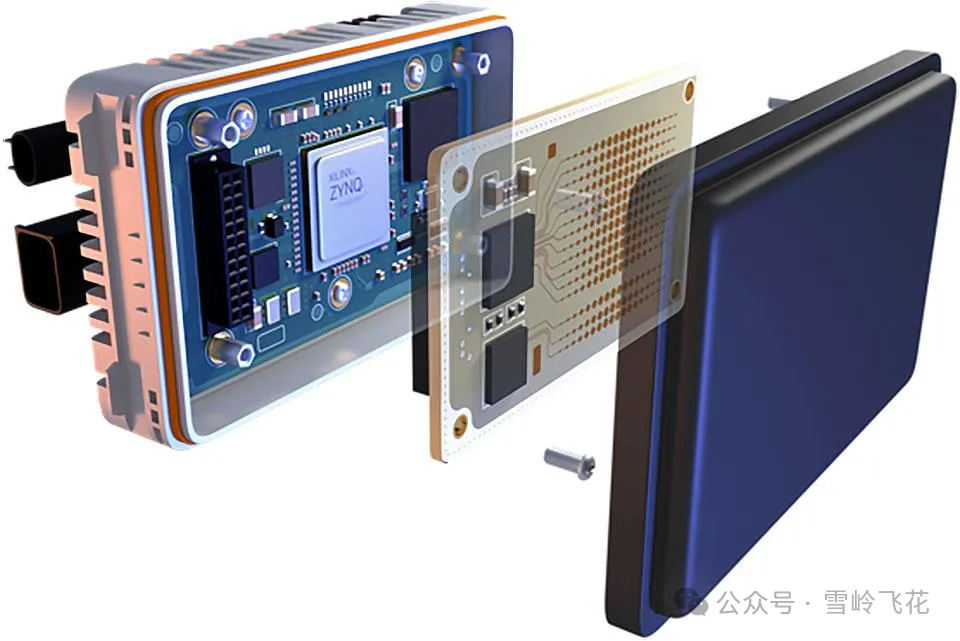
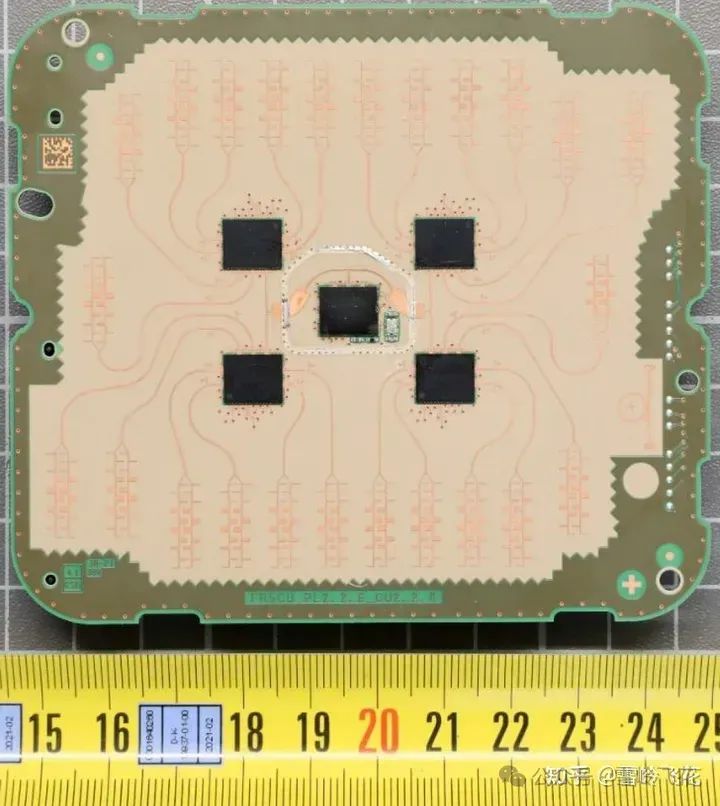
 5. 特斯拉
5. 特斯拉
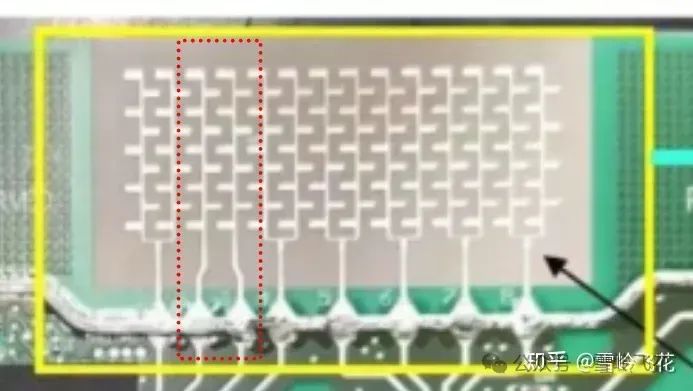
MMIC:2*AWR2243,6T8R,非均匀稀疏阵,微带梳状天线。
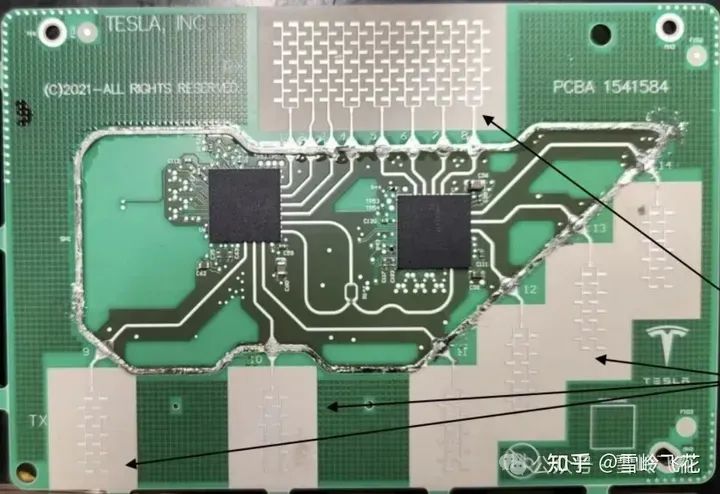
处理器:XA7Z020-CLG400(Artix™-7 FPGA,2*ARM A9)。

支持三种扫频模式,最大扫频带宽700MHz,帧周期约67ms(15Hz)。在8个接收通道中,2和3通道天线间距较小,增益低,波束宽,主要用于近距离扫描。其他通道是是间距较大的均匀阵,增益高,波束窄,用于远距离扫描。
具体检测性能指标还未公开。
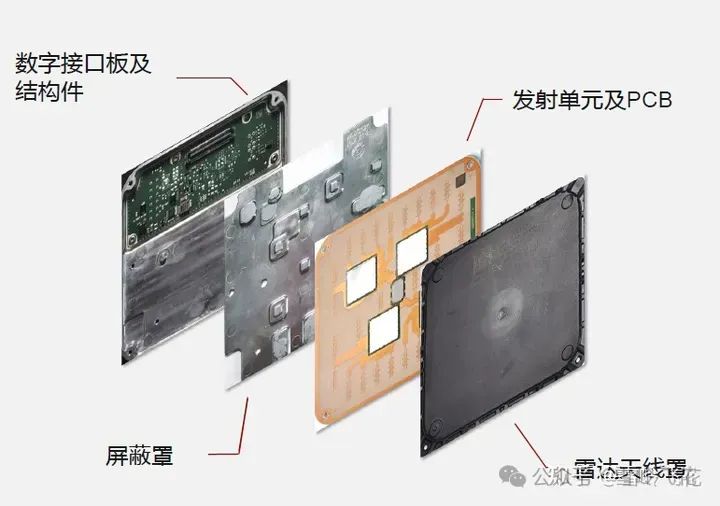
结构方案
雷达有两块电路板,一块是天线板,一块是信号处理板。

天线板:
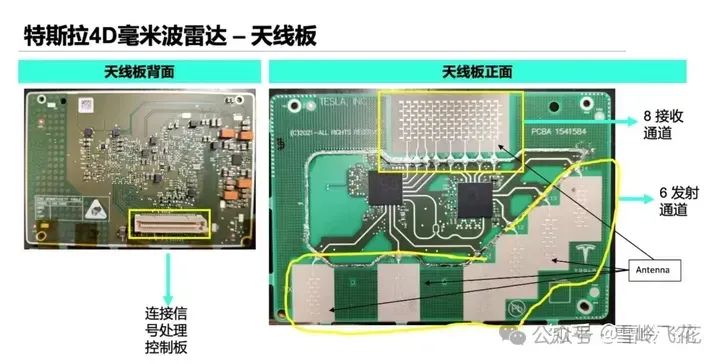
信号处理板:

参考:https://www.teslarati.com/tesla-hardware-4-hd-radar-first-look-photos/
6. 其他
海拉:宣布和傲酷合作开发4D成像毫米波雷达。
维宁尔:与 Arbe 达成合作,计划共同开发车规级 4D 成像毫米波雷达。
法雷奥:在考虑基于Arbe雷达芯片开发下一代雷达系统。
三、自主品牌4D毫米波雷达

在自主品牌毫米波雷达领域,目前是百花齐放、百家争鸣。
据不完全统计,国内有超过50家毫米波雷达公司,其中已经有多家国产品牌成功量产,年交付量在百万套以上。尤其在角雷达领域,国产品牌的市场份额在逐年扩大。其中,森思泰克、德赛西威、楚航科技、华域汽车等品牌排在前列,另外还有福瑞泰克、承泰科技、苏州豪米波、纵目科技、经纬恒润、纵目科技等公司也已经形成较大规模的量产出货。
下图是部分毫米波雷达公司的主要客户情况:

图片来源:申万宏源
4D成像毫米波雷达也是国内自主品牌雷达公司关注的重点,大多数公司都已经有4D成像产品的布局。
1. 森思泰克
森思泰克是国产毫米波雷达公司中,前装定点和出货量最多的公司。
森思泰克2021年出货量大约 120 万颗,2022年预计400万颗,已经获得 200+个车型定点(其中,10+前雷达,20+舱内雷达)。客户包括理想汽车、一汽红旗、吉利汽车、长安汽车、长城汽车、东风汽车等.
森思泰克4D雷达开发量产历程:
2018年,森思泰克在北京车展上推出了第一个4D成像角雷达产品。
2021年,森思泰克率先与长安基于4D成像前向雷达定制与开发合作,拿下新一代平台的多款车型的项目定点。
2022年,森思泰克拿下理想、红旗、吉利、长安等4D成像前向雷达的项目定点,也拿到了红旗的4D成像角雷达的项目顶点。
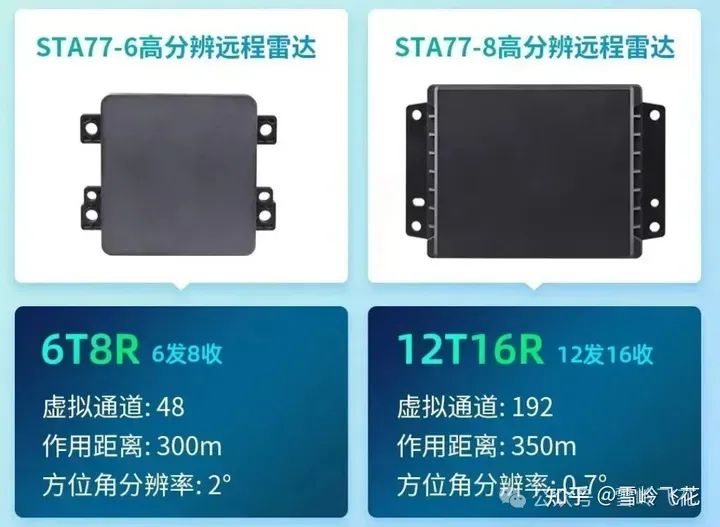
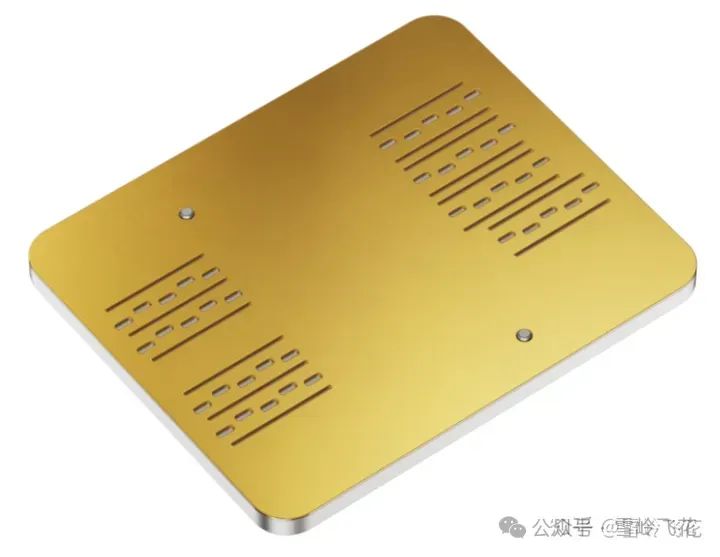
2023年2月8日,森思泰克STA77-6量产车型——理想L7正式发布上市。这成为国产4D成像雷达产品在乘用车前装市场的重要里程碑事件,森思泰克也成为国内先发落地两片级联4D成像雷达量产上市的企业。
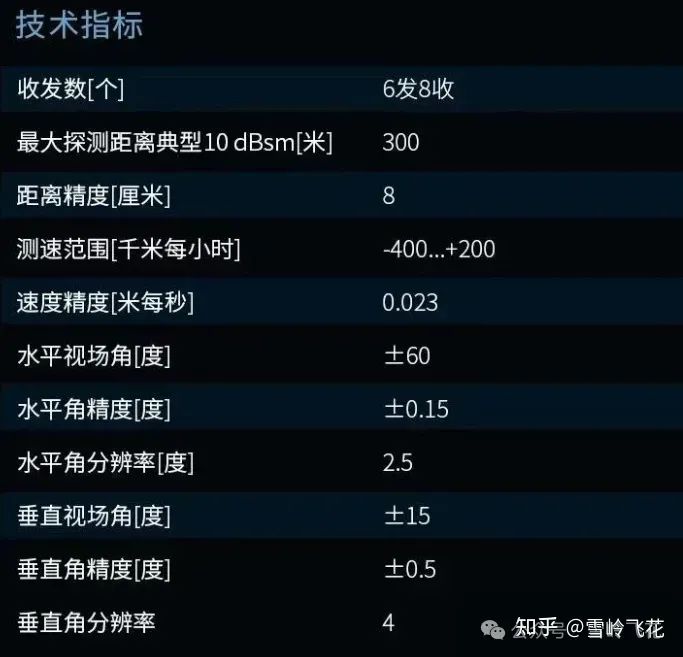
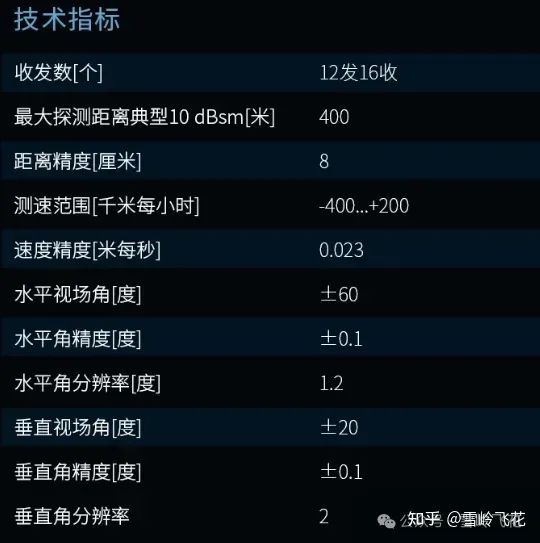
森思泰克主要4D成像雷达产品:STA77-6(2级联,6发8收)、STA77-8(4级联,12发16收)。角雷达有 STA79-8(级联,四角)。
森思泰克主要使用TI的方案,目前均已量产。
另据了解,森斯泰克目前正在开发两款采用定制芯片的4D前向雷达产品,计划 2024Q4 量产。
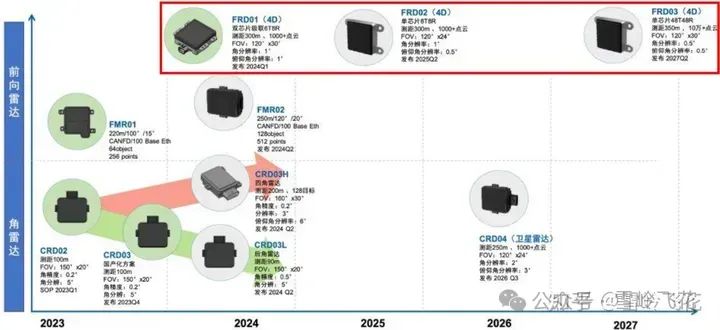
2. 德赛西威
德赛西威角雷达市占率仅次于森思泰克,是本土雷达 Tier1里量产规模排名第二的厂商。
德赛西威的毫米波雷达布局如下,其中4D成像雷达主要是FRD01/02/03型号。
 3. 楚航科技
3. 楚航科技
楚航科技虽然成立时间偏晚,但是发展速度很快,目前已经获得了大量乘用车雷达定点项目。
2022年获得哪吒汽车前雷达、零跑汽车前雷达和角雷达定点,并且角雷达在海马汽车、东风乘用车等车厂完成量产交付。目前楚航科技已经获得了长城汽车、北汽新能源、奇瑞汽车、上汽红岩、宇通客车等30 多家主机厂,近 50 款主力车型前装定点项目。
楚航科技4D成像毫米波雷达有2级联和4级联两个方案。
2级联方案:1024点/帧,64目标/帧,探测距离达300米,角度分辨率为1.5°(水平)*3°(俯仰)。
4级联方案:ARH1,12T16R,性能指标如下:

另外据了解,楚航科技还与 Uhnder 合作,2023 年底实现规模化量产。获得苇渡科技量产定点项目,预计 2024 年量产交付。
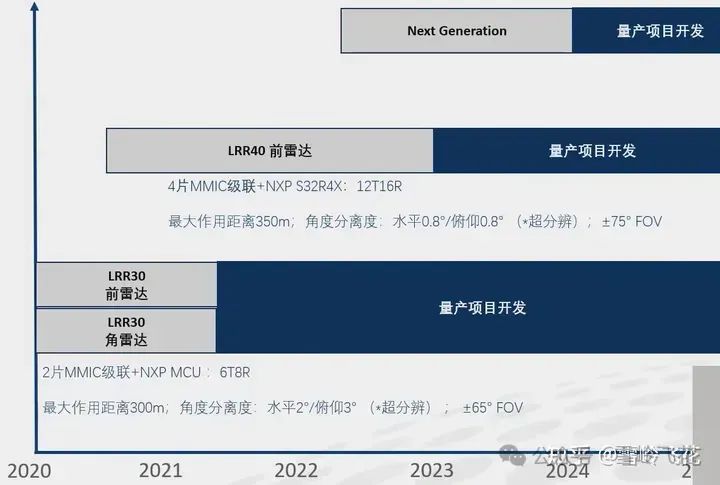
4. 华域汽车
华域是国内最早实现 24GHz毫米波雷达量产的公司之一,基本上和森思泰克同步于 2018 年率先量产。
华域汽车毫米波雷达客户是上汽乘用车、上汽大通、上汽通用五菱、金龙客车等。
华域4D成像雷达主要是两款:LRR30(2级联,1024 点/帧,2021Q4量产)和LRR40(4级联,3072点/帧)。
已经实现对友道智途小批量供货 。

 5. 承泰科技
5. 承泰科技
承泰科技雷达产品在乘用车领域的出货量达到了 100 万颗,其中 70% 为前向毫米波雷达,30% 为角雷达。截至目前,承泰获得国内外头部车企智能驾驶项目超 80 个,比亚迪/长城/奇瑞/吉利/上汽等车企 50 款车型量产。
承泰科技产品矩阵如下:
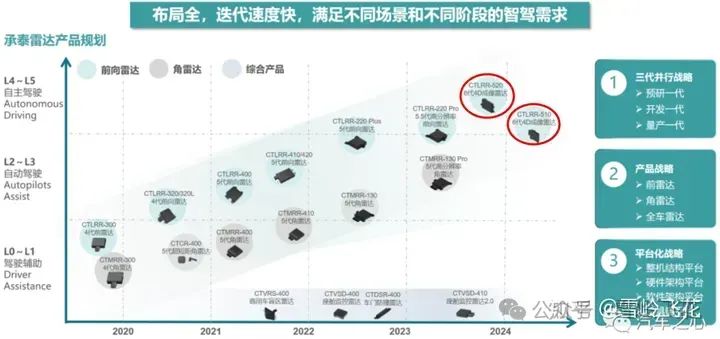
承泰科技4D成像雷达CTLRR-520,可实现车辆最大 350 米的探测距离,俯仰&水平角精度达到0.1°,预计2024年量产上车。
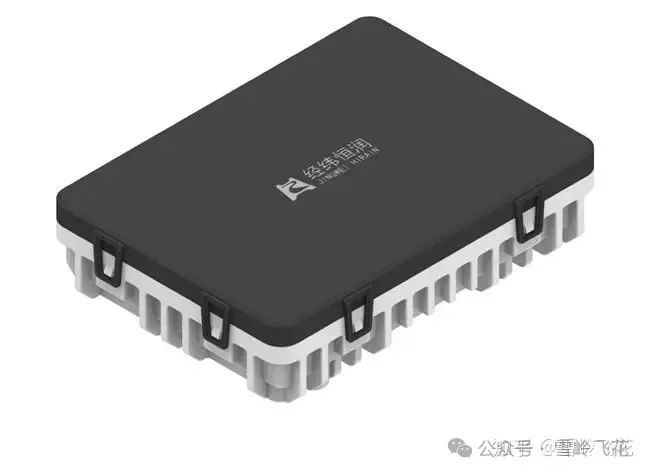
6. 经纬恒润
经纬恒润布局前雷达 MRR、角雷达 SRR、舱内雷达 VODR,已经定点江铃(江铃福特领睿)、江淮、重汽等多家整车厂。
经纬恒润的 4D 成像雷达使用Arbe解决方案。2022年11月,Arbe 宣布经纬恒润向其订购了 34 万个芯片,预计于 2023 年实现量产。
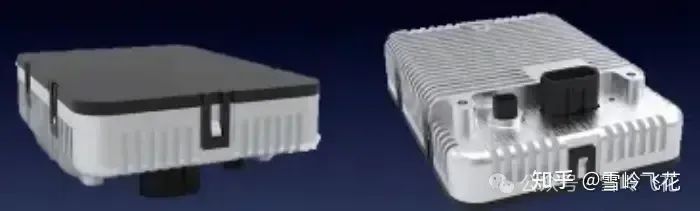
2023年5月,经纬恒润发布了两款4D成像毫米波雷达:
前雷达LRR610:48发48收通道,探测距离达到 350m,视场角:120°(方位角)×30°(仰角),可以实现方位向 1°和俯仰向 1.5°的角分辨率。
角雷达LRR620:24发12收通道。
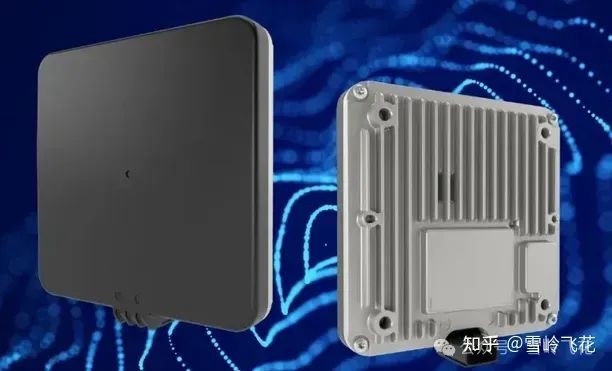
其中,LRR610图片如下:
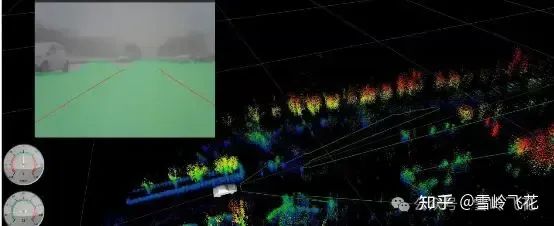
LRR610在大雪天气中的点云成像效果:
 7. 福瑞泰克
7. 福瑞泰克
福瑞泰克获得定点项目约 20 个,2021 年毫米波雷达出货量 15 万只。
福瑞泰克 4D 成像雷达FVR40是采用傲酷方案,采用2片AWR2243P和TPR12处理器,于2022年底在吉利路特斯 Eletre 上首发量产。
 8. 保隆科技
8. 保隆科技
2021年5月,和楚航科技成立合资公司保航科技,其中保隆科技持股 60%,楚航科技持股 40%。保航主要产品有前雷达、前角雷达、后角雷达、高精度雷达、舱内活体检测雷达,其中前雷达和角雷达基于 NXP、英飞凌、加特兰芯片,舱内雷达基于加特兰和 TI 芯片。截至 2022 年 9 月,保航 77Ghz 毫米波雷达已获得超过十个项目定点,产品包含前雷达、BSD 角雷达、舱内毫米波雷达。
保隆科技也已经拿到了一汽解放、陕汽、东风柳汽、上汽依维柯红岩等多家商用车厂商的 AEB 方案定点,2022 年实现小几万只出货量。
保隆科技在2021 年底开始布局 4D 毫米波雷达, 2024 年 1 月,处于 C 样(批量样件)阶段,正在向客户推广。
保隆4D 毫米波雷达采用NXP双级联方案,6T8R,角分辨率(H*V)1.5° * 3°。
9. 纳瓦电子
纳瓦电子 2018 年首次实现雷达量产,新一代角雷达 2022 年在北汽新能源和 PSA 量产。前雷达 NOVA77GF-B PLUS 和角雷达 NOVA77GB-C Pro 在 2022 年 2 月正式实现批量量产。客户覆盖一汽解放、北汽新能源、法国标致 PSA、卡特彼勒。
产品矩阵如下:
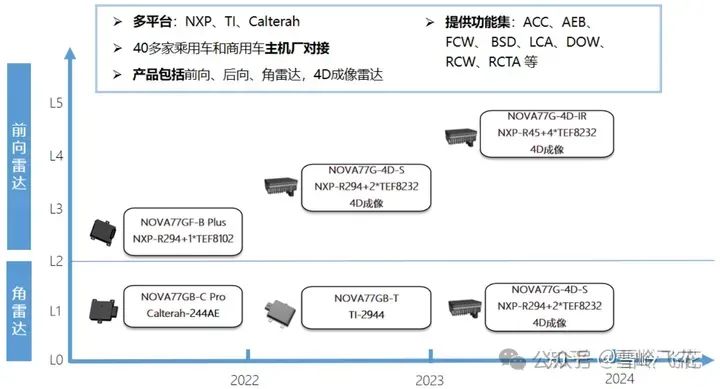
4D成像雷达主要有两款产品:
NOVA 77G-4D-S:2级联,6T8R
NOVA 77G-4D-IR:4级联,12T16R,已拿下两家主机厂的定点项目。
主要性能指标:
探测距离:320m,测距精度:0.1m
水平分辨率:1.6°(3dB波束宽度),方位角精度0.1°
俯仰分辨率:2.4°(3dB波束宽度),俯仰角精度0.2°
点云输出数量:3.2万点/秒
2022年,纳瓦电子又宣布了一款6级联18T24R(432虚拟通道)的4D毫米波高精成像雷达,采用全新设计的HBF(Hybrid Beamforming) 混合波束成形,结合DML技术,将一维角分辨率提高到1.5°度以内。采用独创的稀疏重建算法结合对应的天线阵列设计,大幅提升了成像质量。
10. 安智杰
安智杰有4D成像毫米波主要是:FR-630和FR-610。
其中FR-630结构和指标如下:

 11. 行易道
11. 行易道
行易道的4D成像雷达是ALRR300,在2022 年获得韩国知名车企定点,在 2023Q2 实现量产交付。
ALRR300采用NXP方案,2级联,6T8R,稀疏阵列天线设计、压缩感知超分辨算法。
主要性能:测距300m,角分辨率:H/0.6°,V/0.8°,1024点/帧。
 12. 欧菲光
12. 欧菲光
欧菲光在4D毫米波雷达方向布局多款产品,包括4D中长距雷达、4D成像舱内雷达、4D数字成像雷达等。
另外,欧菲光也在开发4D数字成像雷达,采用Uhnder(S80芯片)数字编码调制技术(DCM)技术。在中科云杉数字感知雷达传感器解决方案中进行应用。

中科云杉数字感知雷达传感器,图片来源:中科云杉
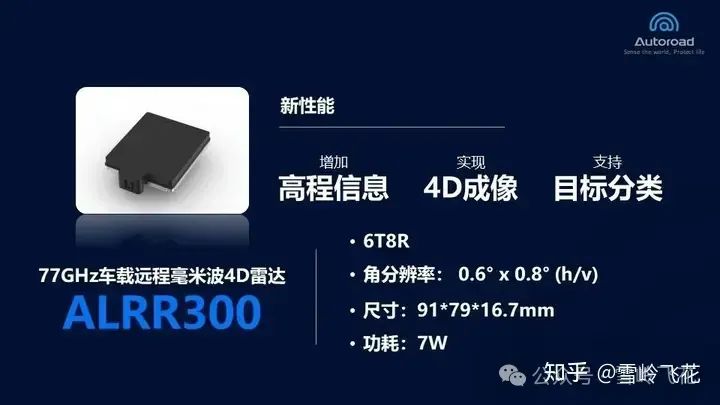
13. 华为
华为2021年便发布了4D毫米波雷达产品,原计划2022年H2 SOP。这款产品采用12T24R的通道,MMIC和处理器具体型号没有公开。
主要性能:
最大探测距离:300m;
FOV:H/120°,V/30°;
角分辨率:H/1°,V/2°;
点云数:1500点/帧。

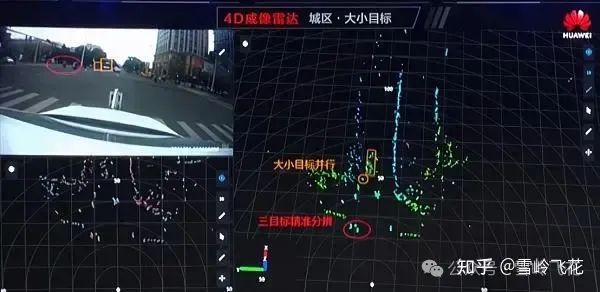
在城市道路的大小目标区分效果:
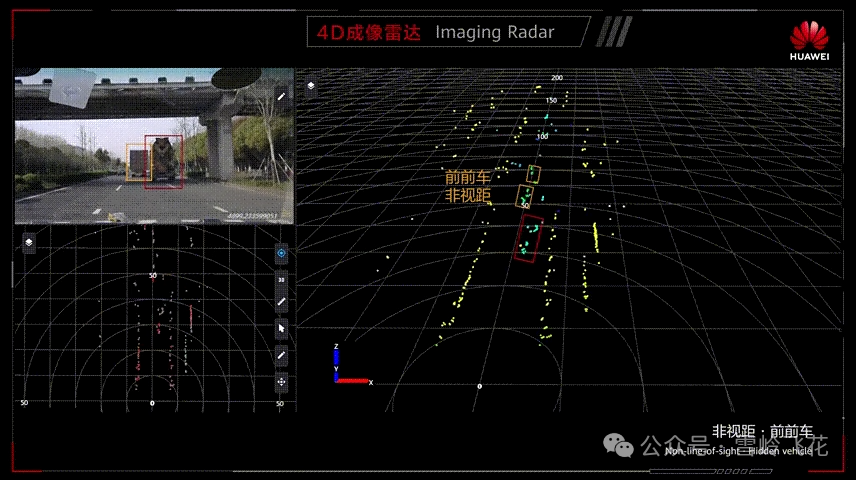
识别前前车:
据行业内部信息,华为目前暂时不做4D毫米波雷达的开发了。
14. 木牛科技
木牛科技的4D成像雷达是I79,据悉获得了国内某头部车企平台定点。

在2019年,木牛4D成像雷达搭载于北美紧凑型机械车辆制造商Bobcat(斗山山猫)上,工作在高粉尘、弱光线、障碍物繁杂等苛刻环境。
 15. 领瞳科技
15. 领瞳科技
领瞳科技的4D毫米波前向雷达,采用首创的“准空气集成波导(AIW)天线”技术。
据了解,领瞳科技独创的准空气集成波导(AIW)天线设计灵感来源于基片集成波导(SIW),但却比基片集成波导拥有传输损耗更低、带宽更宽、更高的功率承载能力以及可靠的结构设计等优势。而相比同尺寸的微带天线,准空气集成波导(AIW)天线则实现了大约有5dB的增益提升。
图片来源:领瞳科技
16. 傲图科技
4D成像雷达Altos V1,处理器采用DSP,4片级联,通道数12T16R(192个虚拟通道)

性能指标:
最大探测距离350m,最大距离分辨率为0.31m,距离准确精度为0.1m;
水平视角100°,分辨率1.32°,准确精度0.14°;
俯仰视角23°,分辨率1.43°,准确精度0.32°;
点云密度:3万点/秒,每帧点数最多3000个,帧频10Hz;
速度检测范围:-110m/s至55m/s,速度分辨率为0.2m/s,精度达到0.02m/s。
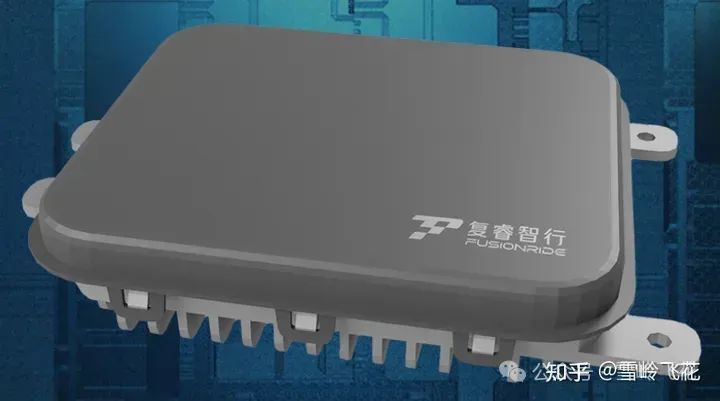
 17. 复睿智行
17. 复睿智行
复睿智行是复星集团旗下的智能出行企业,成立于2021年,成立初始便专注于智能驾驶感知领域。
其4D成像毫米波雷达主要有毕加索和伽利略两个型号。
毕加索:双级联,6T8R,毕加索4D成像雷达计划于 2024Q2 量产商用。

伽利略:双级联,6T8R,采用PMCW技术。
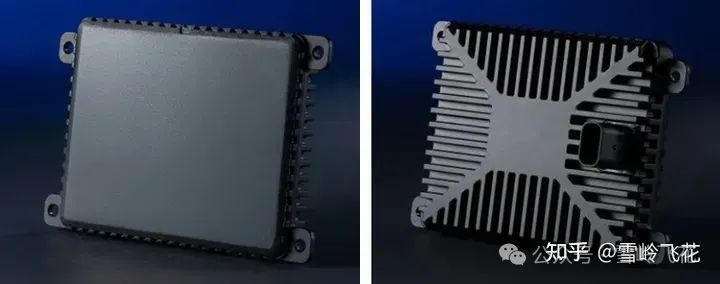
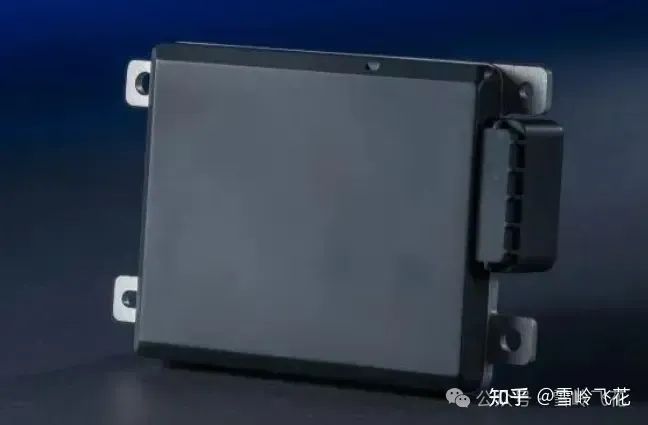
 18. 赛恩领动
18. 赛恩领动
赛恩领先成立于2021年11月,公司致力于研发适用于L3及以上的高性能车载级环境感知解决方案,包括4D成像雷达智能硬件,传感器算法和软件,以及基于人工智能的感知产品。2023年4月份,获得蔚来和小米投资。
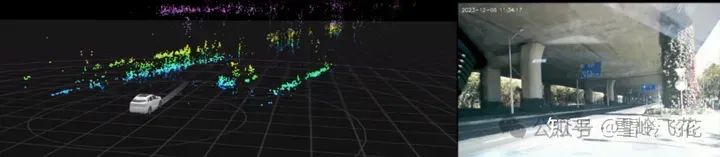
赛恩领动目前有两款4D成像毫米波雷达产品:SIR-4K和SIR-2K,采用NXP方案。
SIR-4K:在2023年初发布,计划于2024年初量产。
指标:
192个虚拟通道,4096点/帧
最远探测距离:400米
角分辨率:0.5度(水平) x 1度(垂直)
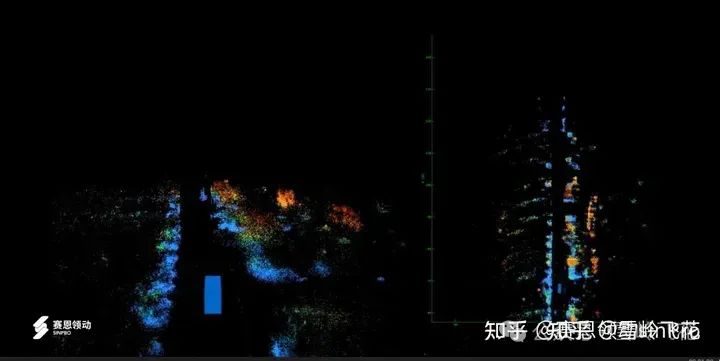
SFR-2K :2048 点/帧,水平角分辨率 :1º
点云示例:
 19. 几何伙伴
19. 几何伙伴
几何伙伴自研的高分辨率4D毫米波成像雷达,点云密度是6万点/秒。
演示视频:

更多请参考:http://www.geometricalpal.com/core-technology-technology
20. 隼眼科技
隼眼科技先后研制成功覆盖全车的前向、前角、后角、4D成像毫米波雷达,早在2019年7月前向雷达就率先实现了量产,目前已经与国内乃至国际多家主机厂、Tier1签订合作协议。
FR601 4D成像雷达:
 21. 威孚高科
21. 威孚高科
威孚高科主要与Arbe合作,目前公司 4D 毫米波雷达产品处于市场应用快速发展阶段,已获取干线物流定点项目。
 21. 纳雷科技
21. 纳雷科技
iMage V系列SR75-4D高分辨成像雷达:
 22. 蛮酷科技
22. 蛮酷科技
蛮酷4D成像毫米波雷达采用国产化芯片方案。2022年,蛮酷4D毫米波雷达将发布C样件,部署到主机厂用户自动驾驶L4平台项目中。
23. 其他
还有很多公司也在4D成像方面有所布局,但是由于缺少公开资料,本文暂时不展开,后续有更新了再补充:
纵目科技、弗迪科技、苏州豪米波、为升科、川速微波、雷科防务、安智汽车、凌波微步、华设集团、联合光电、万安科技、闻颂智能、同致电子、易来达、普陆康电子、莫之比智能等等。
四、新型4D成像毫米波雷达

所谓的“新型”4D成像毫米波雷达,分为两类:
研发全新的4D成像雷达专用芯片组方案,将多发多收MMIC和处理器,集成在一套专用的芯片组中。采用该方案的代表企业:Arbe、Uhnder、Vayyar和Mobileye等。
开发4D成像雷达专用的软件,主要通过创新的软件方法,获得高性能的4D成像效果。采用该方案的代表企业:ZaDar、Oculii和BlueSpace等。
1.Arbe

Arbe公司于2015年成立,总部位于以色列特拉维夫。目前已经从Canaan Partners Israel、iAngel、360 Capital Partners、Catalyst CEL、AI Alliance、BAIC Capital(北汽产业投资有限公司)、MissionBlue Capital、O.G. Tech Ventures、Maniv Mobility、Taya Ventures和OurCrowd等投资者处筹集了5500万美元。
2018年,发布RF射频芯片组。2019年,发布Phoenix解决方案。2020年,发布专用雷达处理器。2022Q1,发布Lynx解决方案。
1.1 解决方案
Arbe解决方案是由一个芯片组构成,该芯片组是采用格罗方德半导体公司22nm射频CMOS工艺。
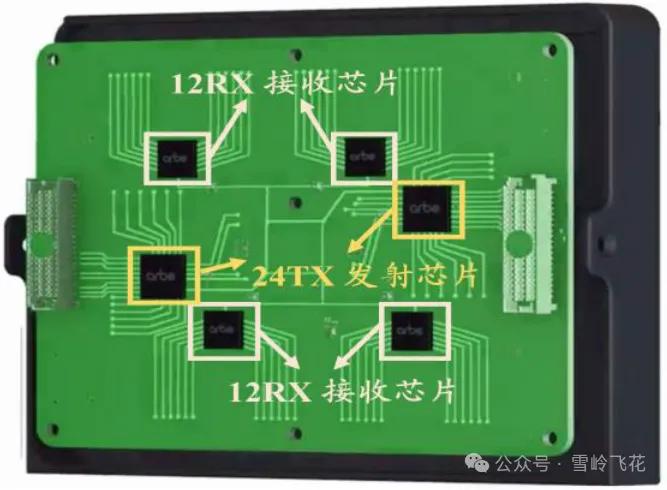
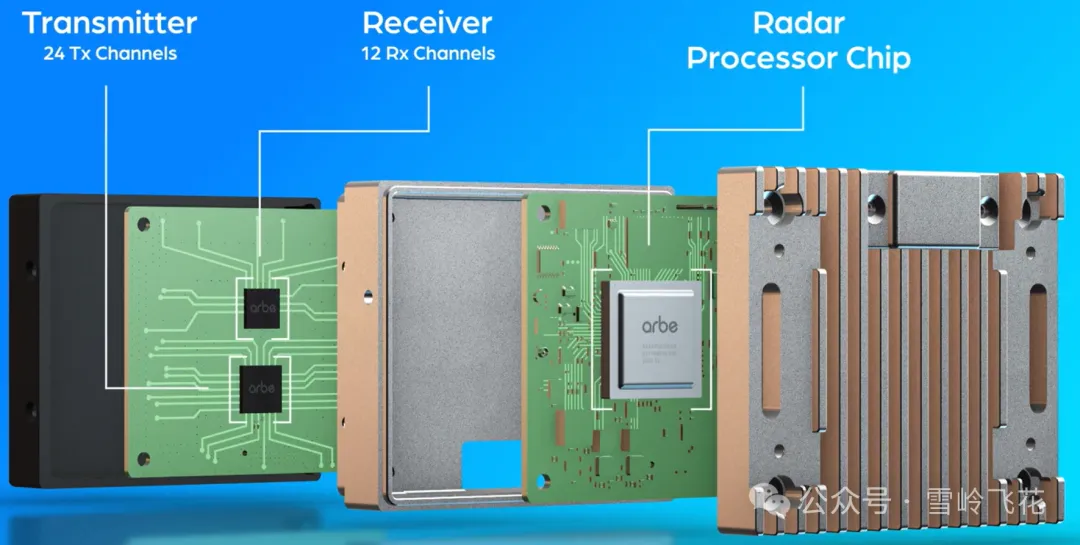
芯片组包括:
发送芯片,每个支持24个通道;
接收芯片,每个支持12个通道;
专用成像雷达处理芯片RPU,最多支持2个发射芯片与4个接收芯片,可实现最多48T48R的超大规模虚拟阵列;

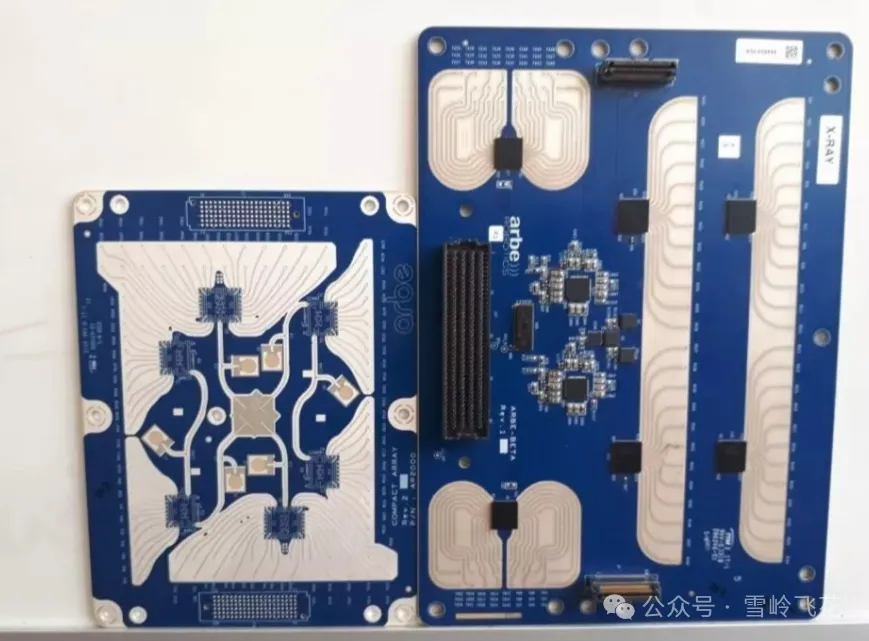
基于该芯片组,可以开发两款雷达:
Phonenix:面向前雷达,2*发射芯片+4*接收芯片+Arbe处理器,48发射通道*48接收通道=2304虚拟通道
Lynx:面向角雷达,1*发射芯片+1*接收芯片+Arbe处理器,24发射通道*12接收通道=288虚拟通道

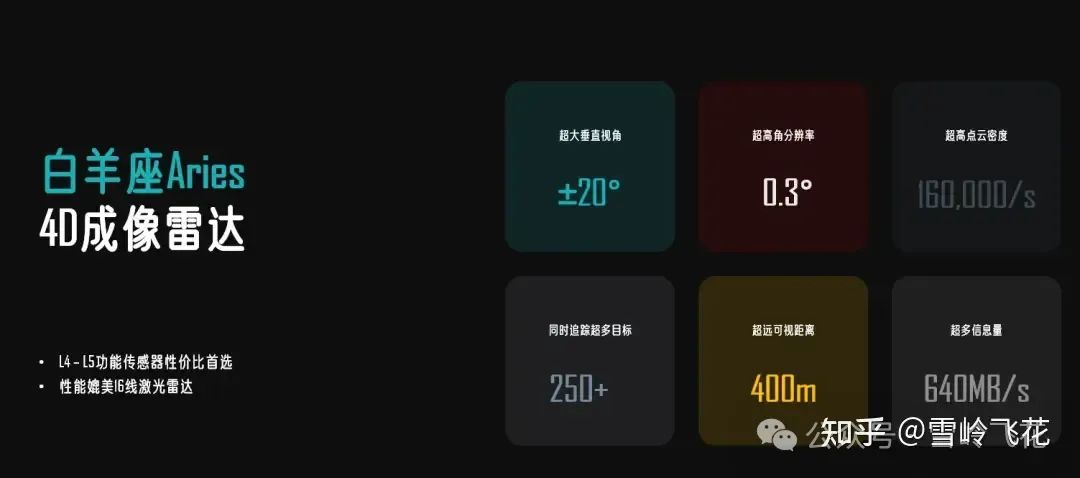
1.2 前雷达Phoenix
性能指标:
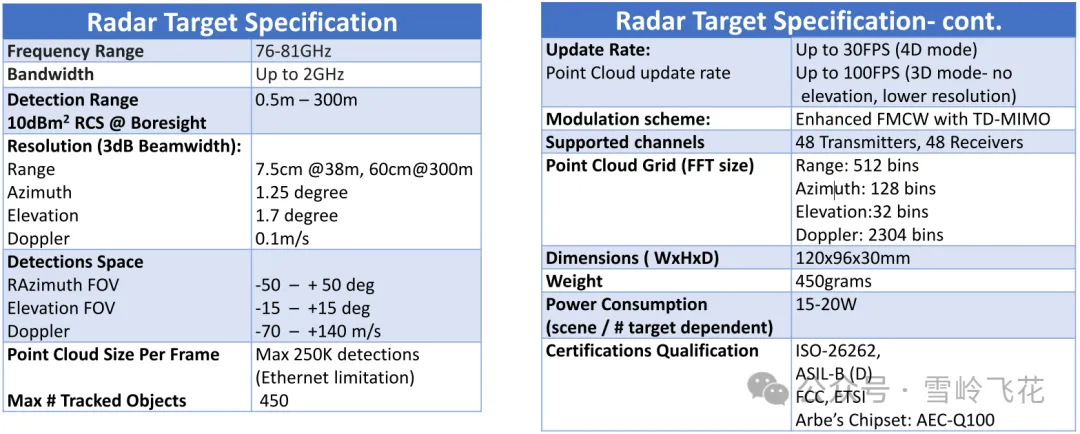
Arbe的Phoenix(48T48R)和大陆ARS540(12T16R)相比,在探测距离、视场角、角分辨率等指标上性能相当。不过,Phoenix虚拟通道数更多,点云密度大约是后者的10倍。
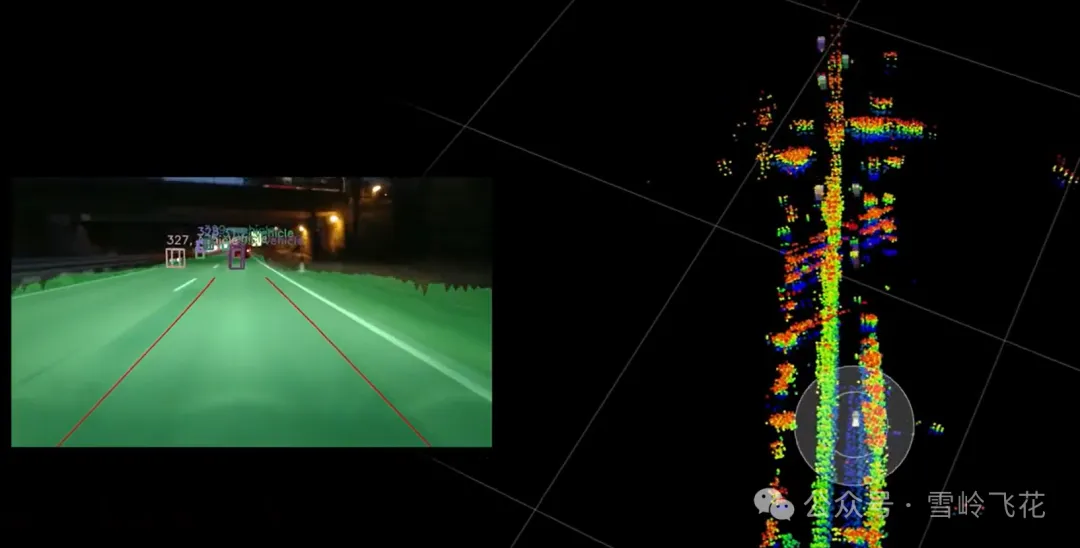
检测效果:
 1.3 角雷达Lynx
1.3 角雷达Lynx
主要性能指标:测距:260m,FOV:140°,角分辨率:2.5°。
检测效果:
 1.4 合作伙伴
1.4 合作伙伴
Arbe与全球多家整车厂、Tier1、芯片公司展开了合作。
维宁尔/麦格纳:2022年10月,Arbe携手维宁尔(已被麦格纳收购)为车规级安全和高级驾驶辅助系统开发下一代雷达。选用Arbe的Phoenix和Lynx解决方案,计划于2023年中进入预生产阶段。
Qamcom:2021年1月11日,Arbe与瑞典公司Qamcom达成合作,将把4D成像雷达技术应用到卡车运输业、农业、采矿业、建筑业以及配送业。应用到工业机器人、安全部门和地面保护系统、无人机以及交通监控基础设施等领域。
现代汽车、法雷奥:建立了合作关系。
英伟达:Arbe的4D成像雷达解决方案被纳入NVIDIA DRIVE生态系统。
在中国市场,Arbe也在积极推进,其中:
经纬恒润:2022年底,Arbe获得经纬恒润首个商业订单,为后者提供34万个雷达芯片组,供2023年和2024年整车厂和自动驾驶项目应用,雷达解决方案将在2023年实现量产。
滴滴:在2023年上海车展期间,Arbe与威孚高科、滴滴自动驾驶货运公司KargoBot达成三方战略合作,共同推进4D成像雷达在自动驾驶领域的研发及商业化应用。
威孚高科:2023年7月,Arbe获得威孚高科千万美元订单。威孚高科开发基于Arbe解决方案的雷达系统,为整车厂以及交通运营等提供高性能的感知雷达系统,将在2023年中量产。
北汽集团:北汽集团在智能驾驶领域投资了Arbe,并且计划在L2+车型上,搭载恒润基于Arbe芯片的雷达产品。
AutoX:AutoX将Arbe的雷达技术整合到L4级自动驾驶出租车车队中,协助处理一些具有挑战性的城市道路场景,提升车辆的安全性。AutoX 预计将在5年内将40万个基于Arbe芯片的雷达,集成到 L4无人出租车队中。
Arbe预计上述客户能够在未来带来每年 40-100 万片的出货量。
2. Uhnder

Uhnder由ManjuHegde和CurtisDavis于2015年共同创立,公司总部位于德克萨斯州奥斯汀。至今,Uhnder在全球拥有250多名员工,在美国、加拿大、德国、印度和中国设有办事处。
2017年,Uhnder获得复星锐正资本投资。2020年,Uhnder完成C轮融资,吸引了众多战略投资方,其投资者包括森萨塔科技(SensataTechnologies)、麦格纳(Magna)、ACMECapital、洛克希德·马丁(LockheedMartin)、上汽集团(SAIC)、EDOM、TDKVentures、高通风险投资(QualcommVentures)等。
2.1 解决方案
2022年4月,Uhnder发布S80片上雷达芯片,并实现量产,这是全球首个采用DCM(数字编码调制)技术的数字成像雷达解决方案。
调频连续波(FMCW):用模拟信号控制载波参量的变化,这种调制方式称为模拟调制。该方式是目前4D成像雷达的主流方案;
数字编码调制(DCM):用数字信号控制载波信号的参量变化,这种调制方式称为数字调制。该方案通过多天线同时发射正交相位编码信号的方式,来探测目标的距离和速度。
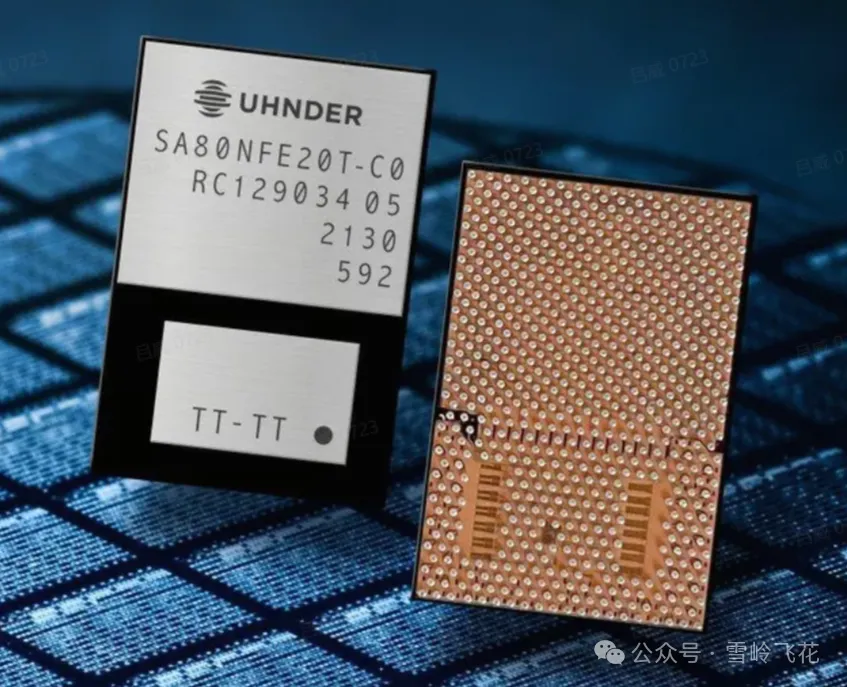
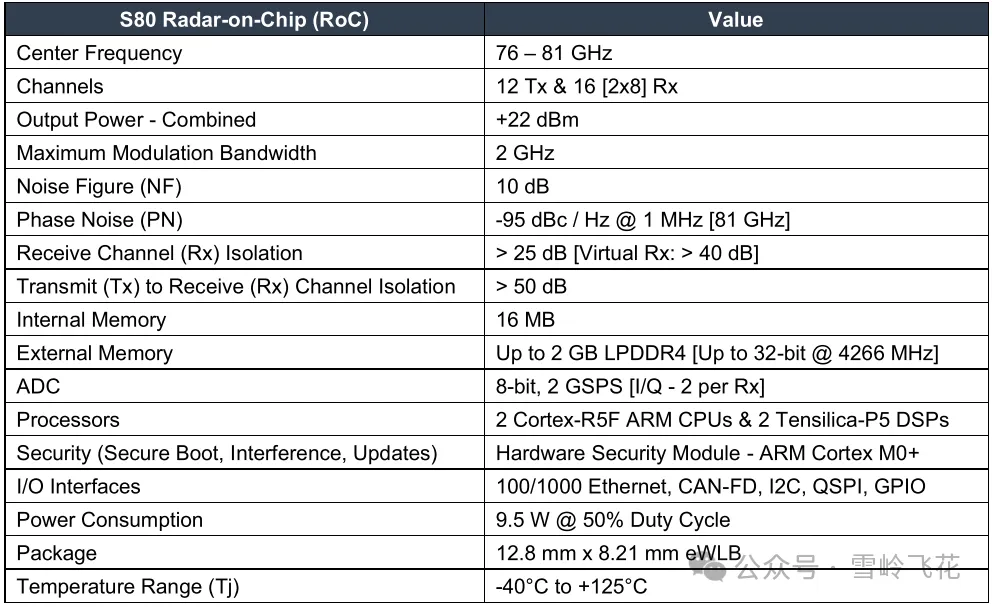
S80采用台积电16/28纳米制程,尺寸仅一平方厘米左右。
S80集成射频前端、CPU、DSP处理器,单芯片物理通道数是12T16R,即192个虚拟通道。可以进行4级联,即48T64R,形成3072个虚拟通道。架构如下:
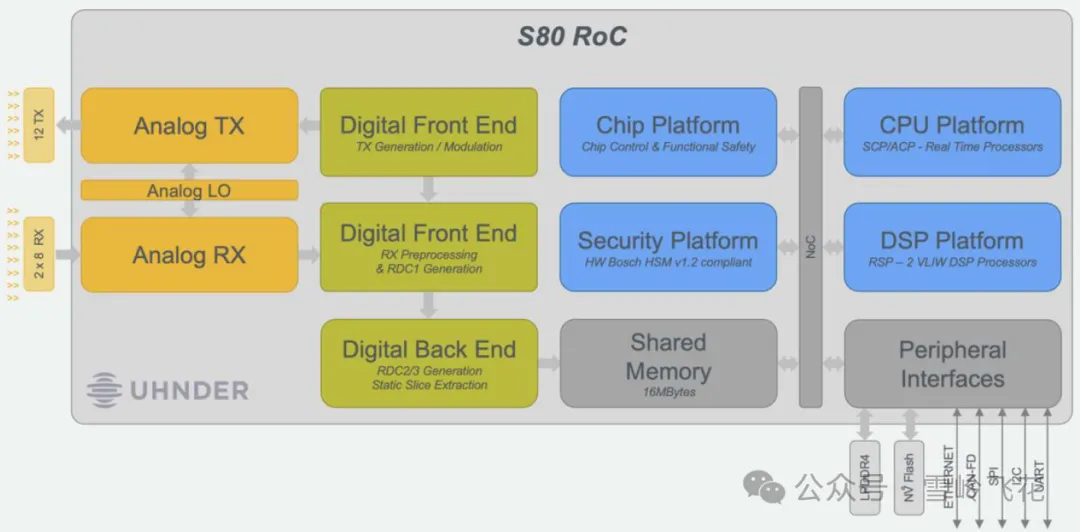
S80的关键参数:
 2.3 数字雷达的特点
2.3 数字雷达的特点
Uhnder数字雷达方案的主要优势是:
探测距离更远。探测车辆距离300m,探测行人距离150m。
分辨率更高。水平和垂直角分辨率做到1.5°,距离分辨率为7.5 cm,可以识别目标物体的细节,形成目标物的轮廓信息。
强弱目标分辨能力强。可以识别相邻很近的大目标旁边的小目标,比如停在隧道或者桥底下的车辆,或者在卡车后面突然横穿的儿童,以及沿着护栏边上骑行的行人。
速度分辨率达到0.01 m/s,能够更好地区分静止目标和动态目标。
抗干扰能力强。每台雷达发射的信号都有独特的扩频序列,从而识别不同雷达之间的信号,最大限度减少信号干扰。
功耗更低。
缺点:系统设计较为复杂、目前成本较高、动态范围可能会有损失等。
2.2 合作伙伴
麦格纳的ICON数字雷达搭载Uhnder的片上雷达芯片,部署在Fisker的Ocean车型上,2022年12月量产。

搭载的Fisker的Ocean汽车:

在中国,黑芝麻、欧菲光等先后宣布与Uhnder建立合作伙伴关系,其中,欧菲光开发的雷达产品已经交付中科云杉,实现数字感知雷达传感器解决方案。
2021年,Uhnder与招商局港口合作,为深圳智慧港口的自动驾驶卡车部署数字成像雷达解决方案。
3. Vayya

Vayyar成立于2011年。
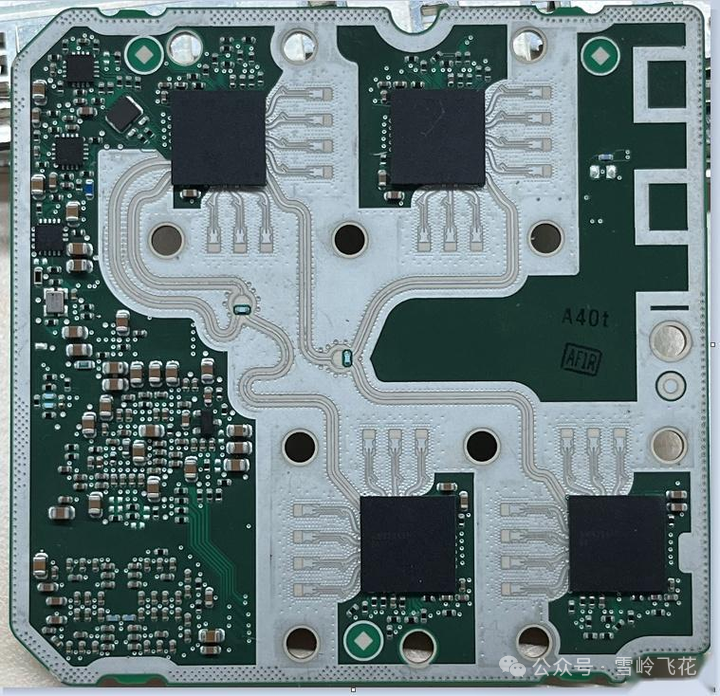
Vayyar 自研了4D成像成像芯片(RoC),该芯片包含数字和模拟射频组件,包括数字信号处理器 (DSP) 和用于复杂信号和图像处理的 MCU。
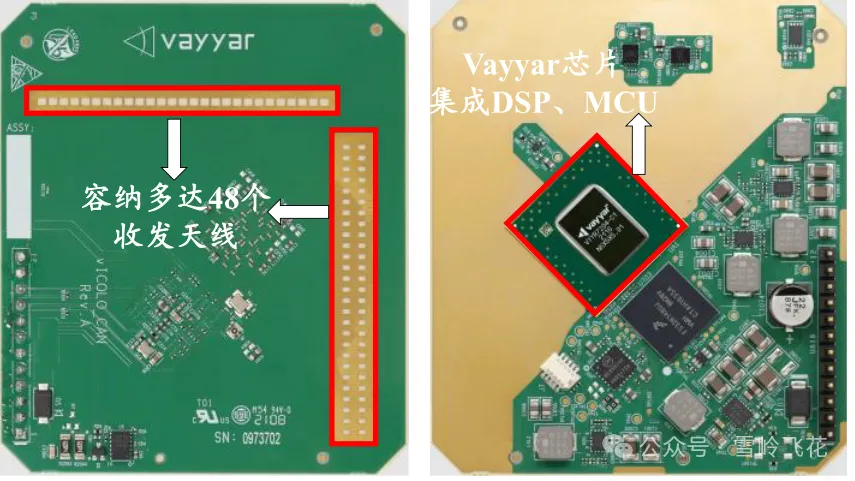
其中,射频组件在60或76-81GHz频率上运行,包含48个发射通道和 48个接收通道,形成了2304多个虚拟通道。芯片尺寸是4*4 cm,如下所示。

Vayyar产品主打养老监护、智慧家居、智慧零售、智能建筑、安防、自动驾驶等领域。
在自动驾驶领域,Vayyar目前主要专注于车载监控,例如驾驶员监测和乘员监测。未来Vayyar计划将他们的雷达概念引入短距的外部应用,例如BSD、RCTA和Front Corner Alert。
Vayyar是定位Tier2,向Tier1提出概念和参考设计,然后由Tier1为OEM集成交付。
4. Mobileye

Mobileye的4D成像毫米波雷达芯片组如下图所示,可以支持最大虚拟通道为48*48=2304个。
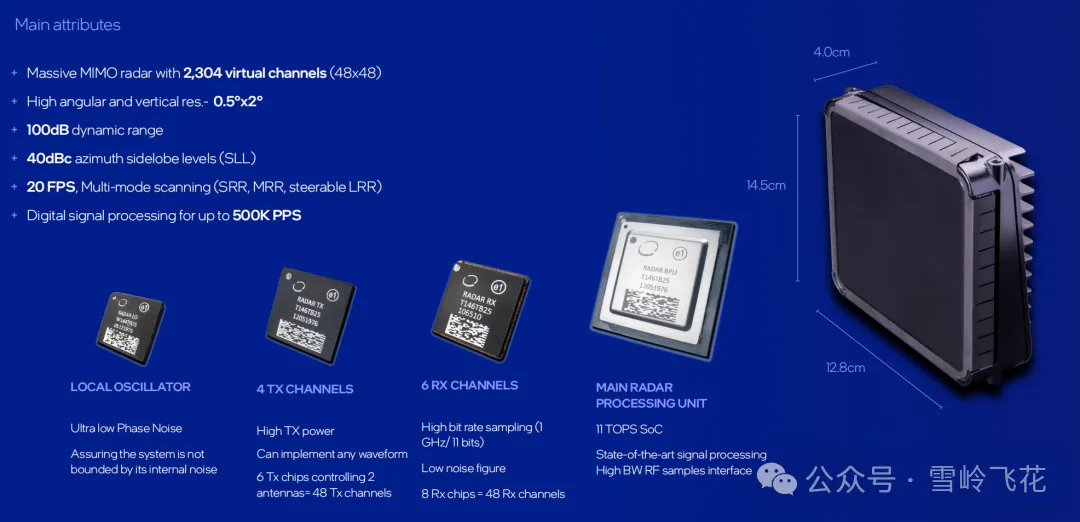
其中:
发射通道:4通道发射芯片,每个通道可控制两个天线阵列,6片可实现48个发射通道;
接收通道:6通道接收芯片,8片可实现48个接收通道;
处理器:11TOPS SOC。
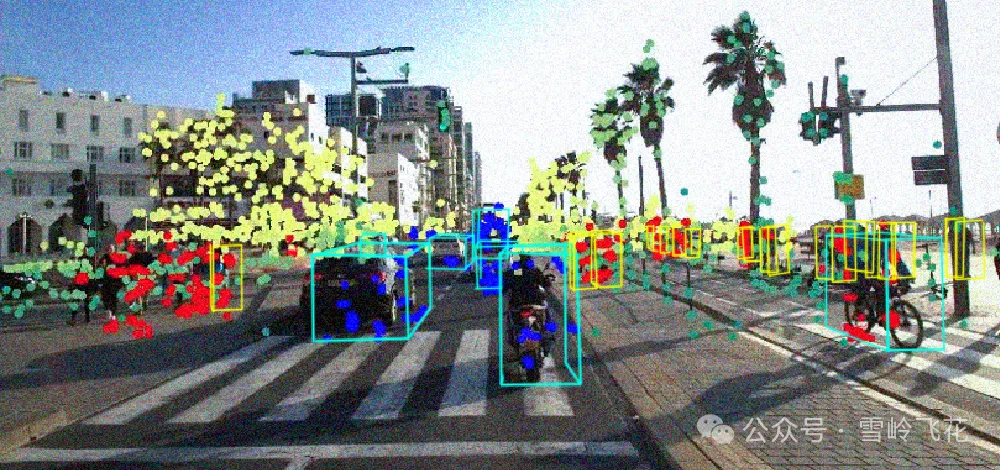
Mobileye成像毫米波雷达的实际效果:

2023年1月,Mobileye宣布和台湾启碁科技(WNC)合作研发毫米波雷达,预计2025年量产。Mobileye更有可能作为Tier1直接提供雷达,而非作为Tier2提供雷达芯片。
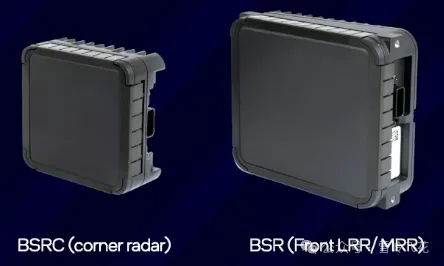
在CES2024展览中,Mobileye介绍了最新的雷达进展,前雷达和角雷达如下。其中:
前雷达BSR:32T48R,共计1536个虚拟通道;
角雷达BSRC:16T24R,共计384个虚拟通道;
性能指标:
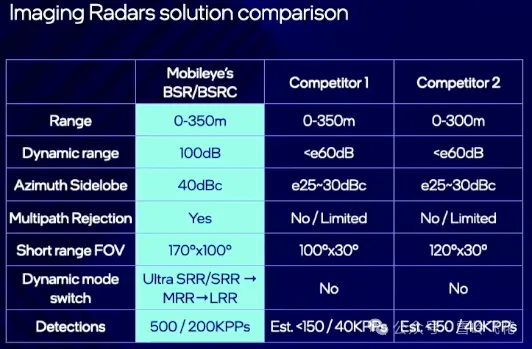
可以在远达237m处,稳定检测低矮的木质货物托架。
 5. ZaDar
5. ZaDar
Zadar是4D毫米波成像雷达和雷达视觉与人工智能软件的开发商。
Zadar结合AI和ML处理技术,开发“软件定义成像雷达”(SDIR),采用自研的zVUE雷达操作系统。zVUE系统包含先进的数据处理引擎,能够检测和消除常见的雷达点云缺陷(例如多径反射Ghost),可以实现高清测绘、场景分割、目标聚类与跟踪、SLAM、传感器融合等功能。
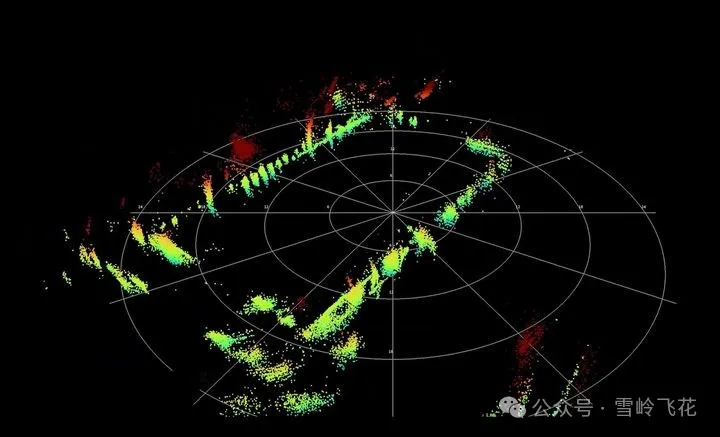
Zadar基于zVUE雷达操作系统,开发了3款雷达(zPROX、zSIGNAL、zPRIME),并且可以支持其他第三方雷达硬件平台。
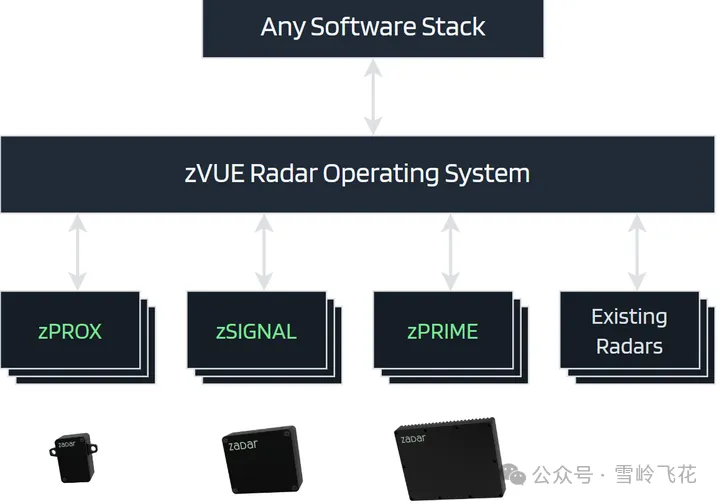
Zadar的三个雷达产品(zPROX、zSIGNAL、zPRIME):

性能指标:
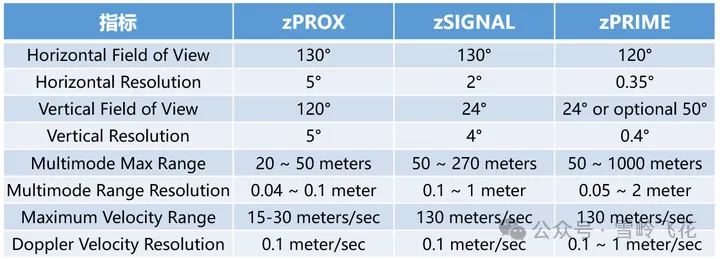
zPROX
zPROX是一个小体积的近距4D成像雷达。
感知效果:
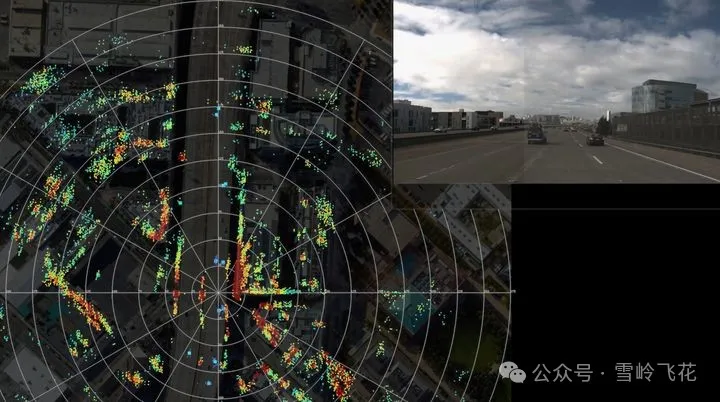
zSIGNAL
zSIGNAL是定位为全平台的4D成像雷达。
点云效果:
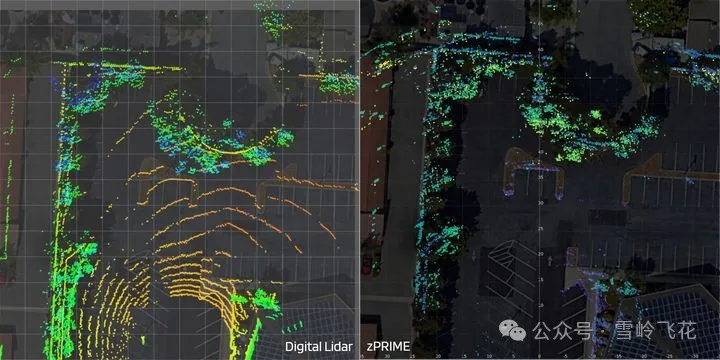
zPRIME
zPRIME是Zadar的SDIR系列中性能最高的产品,能够生成类似Lidar的点云。

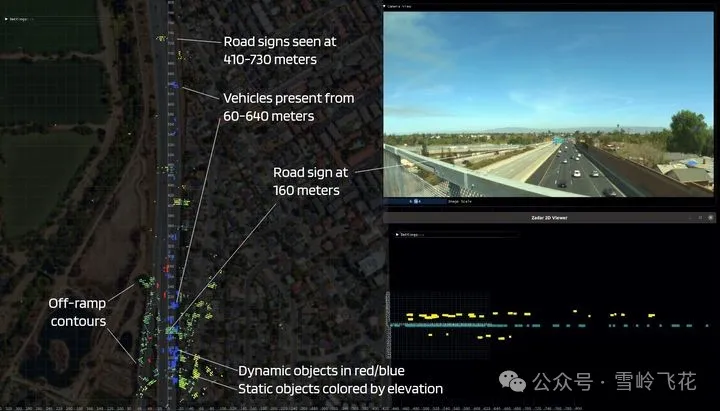
zPRIME可以实现方位角和仰角均低至 0.4 度的分辨率,可以在密集环境中分离数百个静态和动态物体。

当需要远程检测时,例如在高速高速公路行驶中,zPRIME可以检测到 800米以外的车辆。
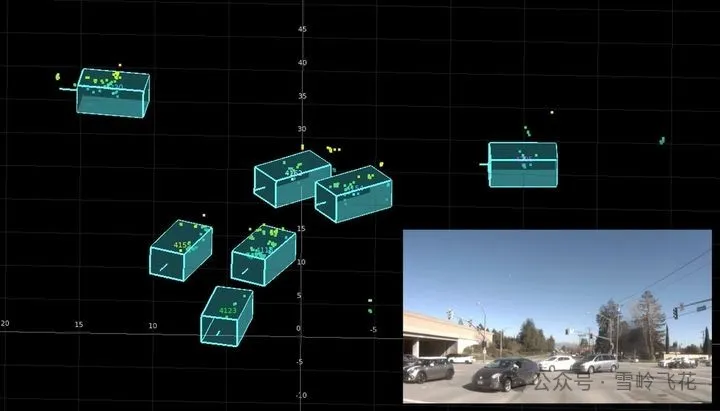
Zadar 利用软件增强聚类和跟踪动态对象:
Zadar 利用软件实现场景静态/动态分割:
 6. Oculii
6. Oculii

傲酷(Oculii)与通用汽车、戴姆勒、海拉、现代摩比斯、松下、三星、维宁尔、吉利汽车、长城汽车、英飞凌、AutoX 等 Tier1 及多家国际主机厂、自动驾驶巨头等达成战略或投资合作,2021年10月,被安霸收购。
傲酷所研发人工智能虚拟孔径成像(VAI)算法,能够基于现有主流车规级标准芯片,使每个接收器在不同时间生成不同相位波形,通过插值和外推数据以形成更大的“虚拟孔径”,大幅提升雷达角分辨率。
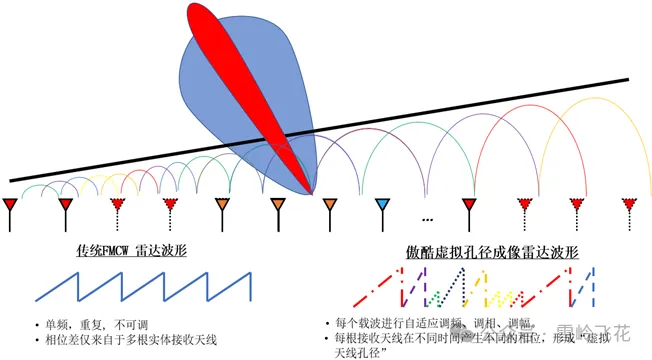
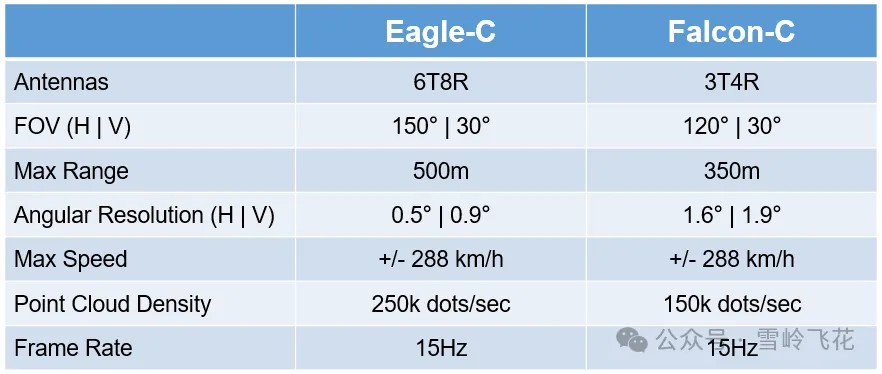
傲酷有EAGLE(前雷达)和FALCON(角雷达)两个解决方案,采用TI的射频芯片。性能指标如下:
感知效果:
 7. BlueSpace
7. BlueSpace

BlueSpace.ai是一家专门提供4D成像毫米波雷达、FMCW激光雷达等传感器的预测感知软件技术方案公司。
BlueSpace.ai的4D预测感知软件,可在单个CPU上以通用的方式,准确检测和预测所有物体的运动,无需事先训练且不依赖高清映射。可处理大量边缘案例,该软件能以全新可扩展方式实现,超高感知准确性和延迟性能。
BlueSpace.ai的算法可快速部署到4D成像雷达、FMCW LiDAR中,可以独立运行或无缝集成到现有AV堆栈中。
BlueSpace在2022CES的演示视频:

总结
随着号称最排斥雷达技术的特斯拉,在新车中也开始装备4D成像毫米波雷达,同时采用性能更强、集成度更高专用芯片的4D成像毫米波雷达逐渐量产,相信其特性慢慢被开发工程师所熟悉,其潜能也会逐渐被挖掘出来。
在未来的自动驾驶系统解决方案中,4D成像毫米波雷达一定可以发挥出其重要而独特的作用。
-end-
分享不易,恳请点个【👍】和【在看】
针对您提到的内容,关于汽车行业的最新趋势和未来发展,作为汽车工程师,我对此有以下几点专业回复:<br><br>关于提到的4D成像毫米波雷达方案,这是一种先进的雷达技术,能够提供更精细的环境感知能力。虽然近年来由于成本较高和其他技术竞争的影响,其普及速度没有达到初期的预期,但随着技术进步和成本控制策略的推进,该领域有望实现更大规模的商业化应用。特斯拉的全新HW4无疑是这个趋势的积极信号。目前市场上已有多家主要的雷达公司在研究和推广这项技术。<br><br>此外,竞争格局仍处于快速变化中。未来的发展应继续关注更多国内外新兴车企的实践及最新的技术发展情况,保持行业的持续关注和研究。对于未来的应用前景和可能的技术创新方向,更应深入探讨和评估其可行性及市场需求。
 |手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 )
|手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 ) 4D成像毫米波雷达方案和34家主要雷达公司产品w111.jpg
4D成像毫米波雷达方案和34家主要雷达公司产品w111.jpg