任何脱离应用场景的使用说明都是耍流氓!
接下来我们继续进行VBOX在前碰撞试验场景下的使用介绍。
三、CCRm场景应用
CCRm(Car-to-Car Rear Moving),前方匀速行驶车辆追尾测试。
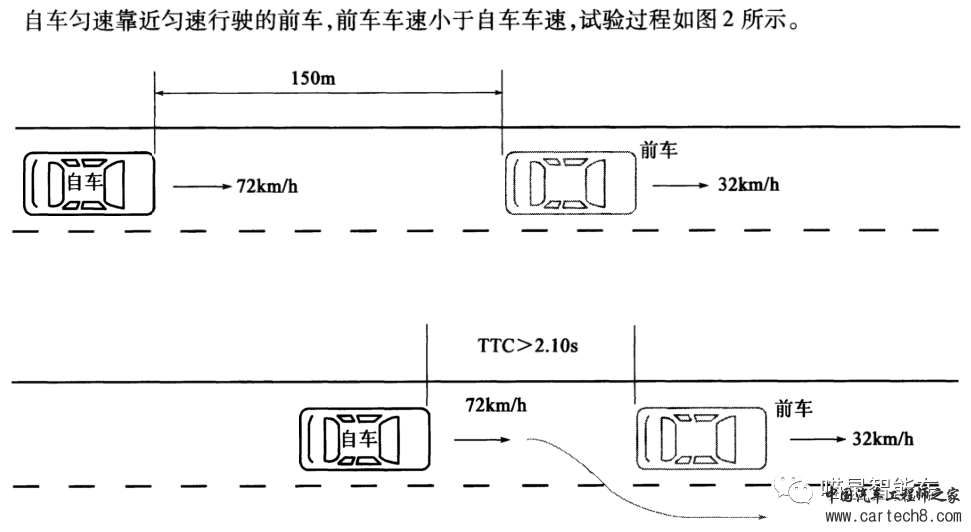
在CCRm场景中,我们的目标是得到如下真值信息:自车速度v1,目标车速度v2,自车与目标车的距离d。
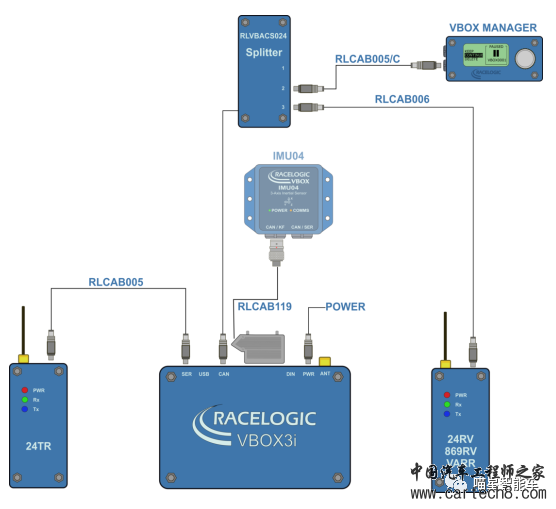
由于需要获取自车和目标车的定位信息,我们需要在自车上和目标车上分别搭建VBOX系统,自车/目标车硬件连接方式如下图。
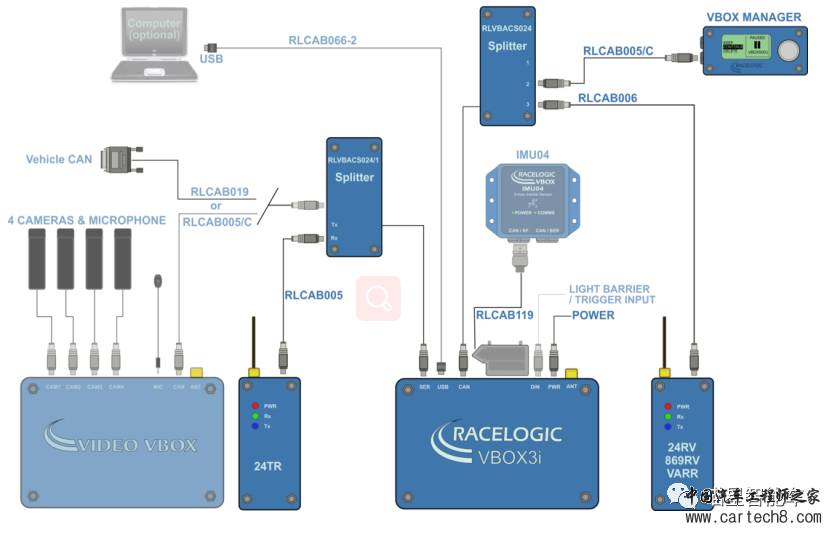
在这张连接图中,我们可以发现,相比于CCRs情景,我们需要多连接车车通讯模块,即图上的24TR模块。
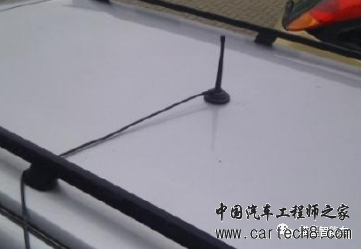
这意味着目标车上需要增加一个2.4GHz的车车通讯天线,用以车间通讯。由于2.4 GHz的传输是非常直接的,具有狭窄的波束宽度,安装天线时需要安装在车顶最高的位置,并且与其他天线保持至少50cm的距离。
在安装完相应的设备后,我们可以使用手柄或者PC机中的上位机进行配置,配置RTK完成后,进行碰撞点的设置。
由于当前的定位点是目标车的GPS天线位置,而实际碰撞点是目标车尾部。这两点之间会有一个偏移量,所以需要我们设置碰撞点消除偏移量。碰撞点可以设置1-2个,也可以设置多个,一般使用过程中仅设置最少的。
然后我们就可以开始进行试验了,当我们看见车车通讯模块上的TX/RX等在不停闪烁时,就表示能够成功进行通讯了。
四、CCRb场景应用
CCRb(Car-to-Car Rear Braking),前方减速行驶车辆追尾测试。
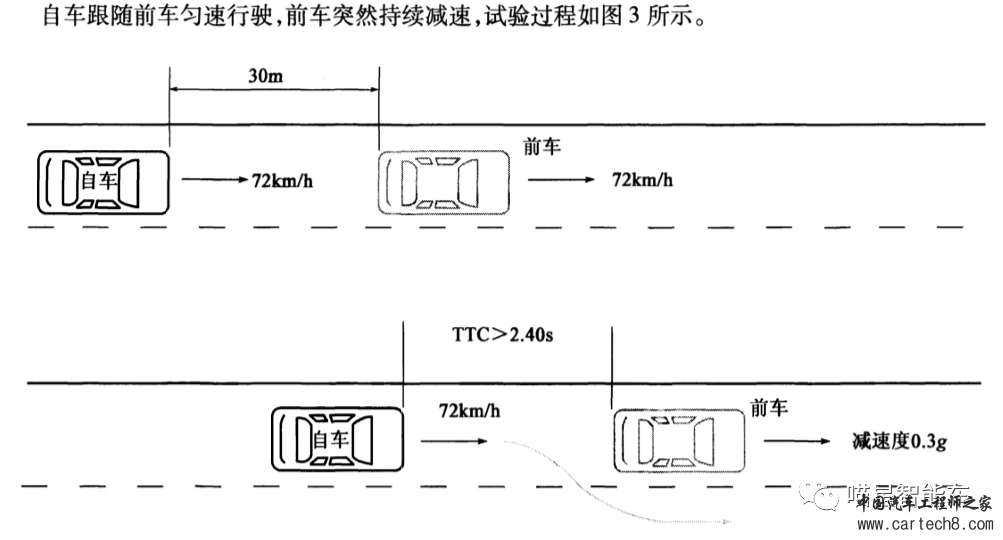
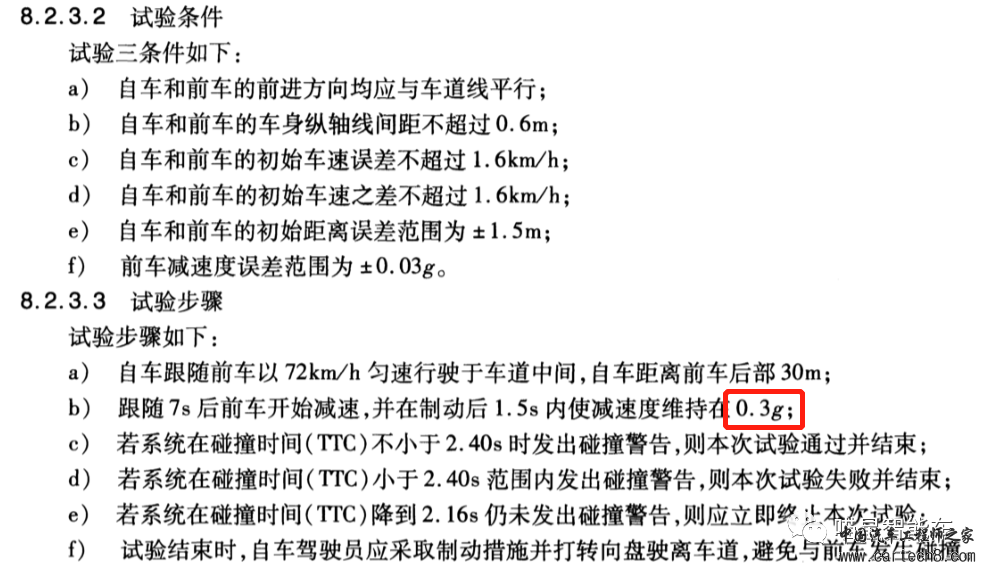
CCRb场景的使用方法和CCRm场景类似,只需要在上位机软件设置中,多增加一个加速度a的输出信号即可。
我们可以看到,在三个场景中都可以不用到IMU硬件,那么IMU模块的作用是什么?
IMU 集成模块会在 GPS 信号较差的环境下用一个实时的卡尔曼滤波器自动地对GPS 数据进行校正,并且同时还能通过 IMU 以100HZ 的速度计算出当时的俯仰和侧倾角作为一个参考值。
也就是说,如果嫌麻烦,在信号较好的情况下,我们可以不去连接IMU~
——————————————————
我坚信最好的学习就是输出。
 |手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 )
|手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 ) VBOX使用指南(四)——前碰撞试验场景下的应用(2)w8.jpg
VBOX使用指南(四)——前碰撞试验场景下的应用(2)w8.jpg