
上篇文章NVIDIA ADAS-英伟达Orin芯片介绍讲了英伟达的芯片,本篇文再展开讲下ADAS芯片的一些基础知识,然后下一篇文章讲下目前主流的汽车芯片厂商产品。
自动驾驶(AD)的使命是将人的脚(纵向控制)、手(横向控制)、眼(感知)和脑(决策)等从驾驶任务中解放出来。
ADAS走向大众视线的原因:
ADAS相关的软硬件技术越来越成熟和稳定,成本也越来越低。比如:毫米波雷达跟五年前相比下降了超过50%。一些基本的ADAS功能(比如:自动紧急刹车AEB)被纳入到了各国的汽车评测体系(比如:C-NCAP)中,这在客观上极大的推动了这些ADAS功能的普及。中低端车竞争加剧,ADAS功能可以有效地提升品牌的科技感和驾车体验,造成主流合资品牌和自主品牌的重点车型甚至超过了一些国际上的高端品牌。
1. ADAS介绍
ADAS 全称 Advanced Driving Assistance System,又称高级驾驶辅助系统,主要依靠包括视觉摄像头、毫米波雷达、计算平台的组合来实现自动驾驶辅助功能。
ADAS涉及到12门技术,主要基于三种传感器——摄像头,雷达,激光雷达。在这12门技术中,组合出了感知,控制,决策这自动驾驶三大模块。ADAS的历史最早可以追溯到1948年,机械工程师Ralph Teetor发明了第一款“定速巡航”系统。
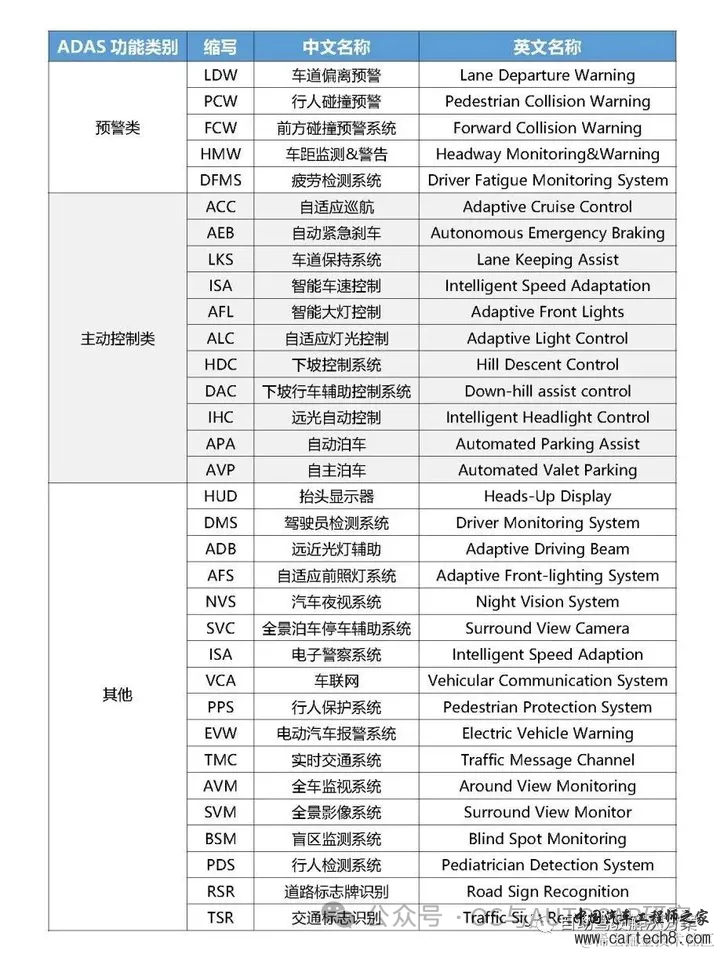
1.1 ADAS功能分析
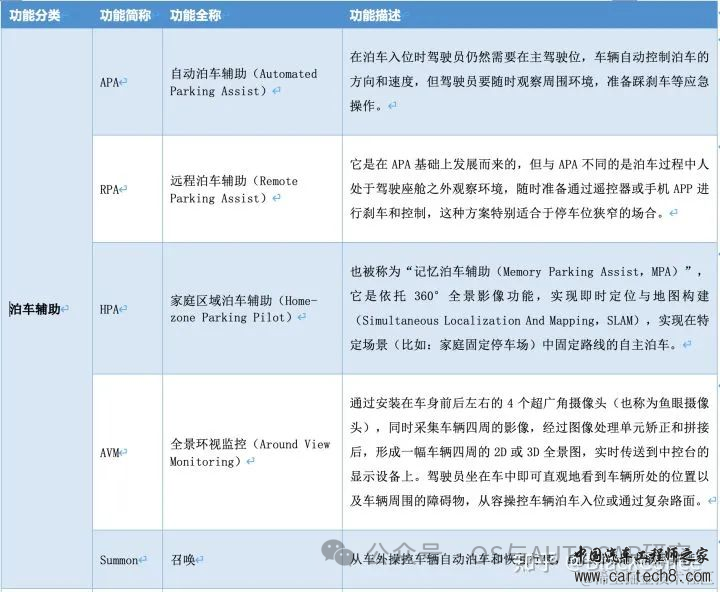
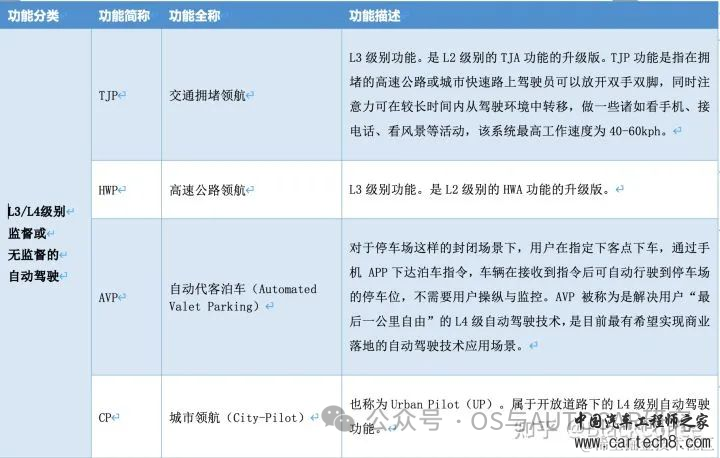
ADAS的功能主要有:主动安全功能、舒适性辅助驾驶功能、泊车辅助功能和监督/无监督自动驾驶功能等。


之前文章NVIDIA ADAS-英伟达DriveOS入门提到过自动驾驶的等级如下:

通常,L0-L2级自动驾驶,习惯用ADAS表征;L2+级自动驾驶,用ADAS/AD表征,以示过渡;L3-L4级自动驾驶,用AD表征。
1.2 ADAS系统构架

环境感知:感知系统依靠各种传感器(包括:摄像头、毫米波雷达、超声波雷达、激光雷达、高精地图/IMU/GPS等)来获取汽车所处环境信息和周边车辆、行人、交通信号灯和路标等信息,为汽车的综合决策提供数据支撑,解决“我在哪”的核心问题。
决策规划:通过环境感知的结果进行数据融合,结合高精地图数据确定合适的工作模型,决定相应的轨迹规划方案,以达到替代人类作出驾驶决策的目的,将智能汽车以拟人化的方式融入整个交通流当中,解决“我去哪”的核心问题。
控制执行:也就是对一个具体的最小决策规划结果的实际执行,从而达到规划的目的。具体在车上,通常体现为通过各种控制理论和算法来控制车辆的驱动、制动和转向系统,从而实现车辆的横向及纵向控制,使汽车精准地按照决策规划实现有效的避让、减速、车距保持、转向等动作,解决“我该如何去”的核心问题。
1.3 ADAS传感器介绍

传感器是车辆感知系统收集环境信息、车辆自身状态信息和位置信息等的重要手段。自动驾驶车辆所配备的传感器可以分为三类:
车辆自身状态感知传感器(简称:自感知传感器):自感知使用本体感应传感器来测量车辆的当前状态,包括:车辆的速度、加速度、横摆和转向角等。本体感应西西里通常使用预先安装的测量单元来获取信息,比如:里程表、惯性测量单元(IMU)、陀螺仪(Gyroscopes)和来自控制器局域网(CAN)总线的信息。
定位传感器(Localization):定位传感器使用GPS等外部传感器(Exteroceptive Sensor)或惯性测量单元读数的航位推算进行定位,可以确定车辆的全球和本地位置。车辆高精度定位通常会基于多个传感器信息的组合来进行,比如:GPS、IMU、里程表和摄像头等。对多个传感器的数据融合可以最大限度减少单个传感器的局限性和缺点,提高定位的精度和可靠性。
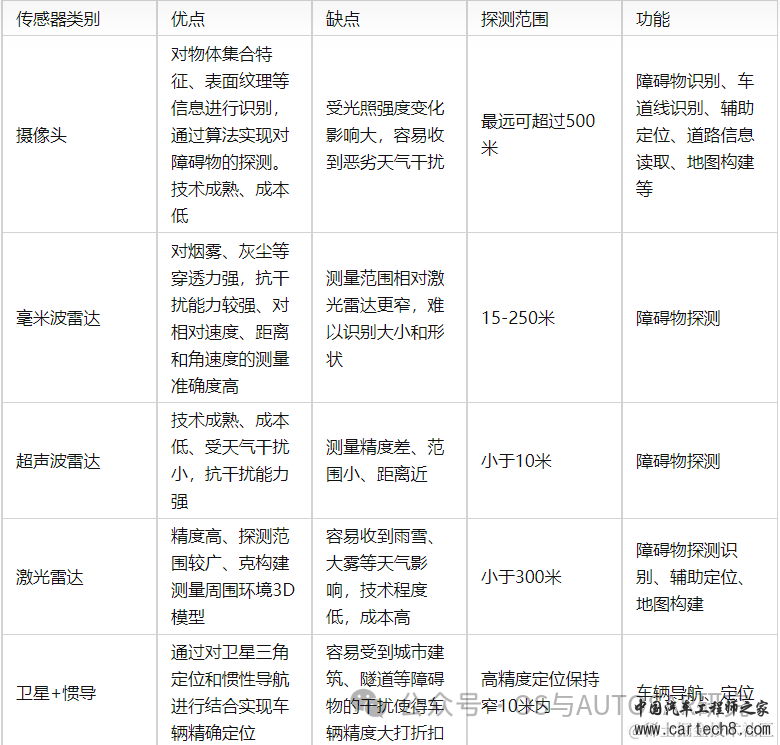
环境感知传感器(Surrounding-sensing):环境感知传感器主要有摄像头、超声波雷达、毫米波雷达和激光雷达等四种。
环境感知系统依靠这些环境感知传感器来采集车辆所处环境信息数据,并对其进行一系列的计算和处理,从而对周围环境进行精确建模,其输出结果是一个环境模型。所谓环境模型是指车辆外部物理世界的数字表示,它包括道路、要避开的物体(比如:其它车辆、易受伤害的道路使用者等)以及可驾驶的“自由空间(Freespace)“的表示。
下表总结了ADAS系统中常见的各类传感器的特点:
 1.4 传感器布局
1.4 传感器布局
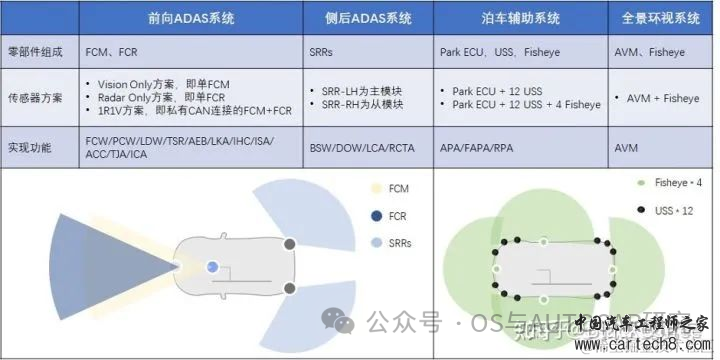
前向ADAS系统:一般由单FCR,或者单FCM组成;当前主流配置是FCR+FCM组成的1R1V方案,能够支持到TJA/ICA的L2 ADAS(单车道驾驶辅助)。后续伴随视觉检测能力的提高,在L0-L2级ADAS/AD定位的车型上,有向单FCM发展趋势,因为车道线等横向控制所需感知信息,只有视觉能提供;省掉雷达能降低系统成本。
侧后ADAS系统:一般由侧后方两个SRRs组成,实现大部分侧后向ADAS功能。
自动泊车系统:即泊车控制器+12颗超声波传感器(USS)组成的APA(自动泊车辅助)系统;实现功能主要是APA和FAPA等。
ADAS传感器布局中的术语简称:
FCM:Front Camera Module,前视摄像头总成,有单目(Mono)、双目(Stereo)、双焦(Bi-Focals)和三焦(Tri-Focals)4种形态。
FCR:Front Central Radar,前雷达模块,有MRR (中距,Mid-Range Radar) 和 LRR (长距,Long-Range Radar) 2种形态。一般1R1V方案(后续会详细解释该方案)中常选择MRR作为前雷达模块,5R1V方案中,常选择LRR作为前雷达。
SRRs:Side-Rear Radars,侧后雷达模块(左、右,一般左master右slave),有SRR (短距Short-Range Radar) 和MRR (中距Mid-Range Radar) 2种形态;SRR常为24G毫米波,MRR常为77-79G毫米波。这里SRR缩写就有两个含义,可能是指侧后雷达模块,也可能是指短距离毫米波雷达,因此加s区分侧后雷达模块(SRRs)。
USS:Ultra Sonic Sensor,超声波雷达传感器。
下图是L2+级别ADAS/AD系统最大化的传感器架构方案——5R-12V-12USS方案。这个传感器布局架构的上限就是“坚决不上激光雷达”。只要上了激光雷达(一般是前向激光雷达),就到了L3级AD系统的传感器架构;
 2. AD芯片介绍
2.1 车规芯片要求
2. AD芯片介绍
2.1 车规芯片要求
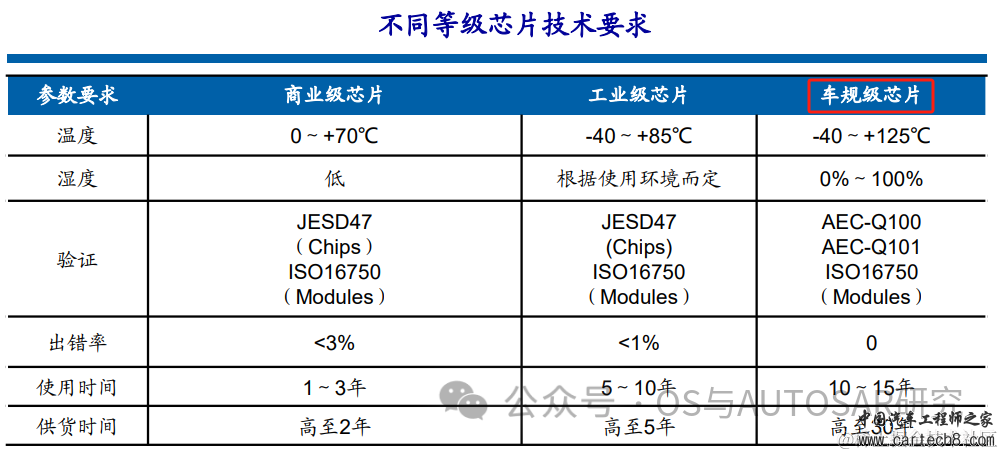
车规级芯片特殊的技术和工艺要求挡住了企业进入的脚步。车规级芯片有着比消费级芯片更高的技术门槛,需满足温度、振 动、电磁干扰、长使用寿命等高要求,还要通过可靠性标准AEC-Q100、质量管理标准ISO/TS16949、功能安全标准ISO26262 等严苛的认证流程,大部分芯片企业尚不具备转型进入能力。
AEC-Q100
关键测试类别包括:Accelerated Environment Stress (加速环境应力);Accelerate Lifetime Simulation (加速寿命仿 真);Packaging/Assembly (封装/组装);Die Fabrication (芯片制程);Electrical Verification (电气验证);Defect Screening (不良品筛选);Cavity Package Integrity (腔体封装完整性)。
ISO/TS16949:2009
国内、 外各大整车厂均已要求其供应商进行ISO/TS16949:2009认证,确保各供应商具有高质量的运行业绩,并提供持续稳定的长期合作,以实现互惠互利。因美国或欧洲的汽车零部件供应商同时向各大整车厂提供产品,这就要求其必须既要满足QS-9001,又要满足如VDA6.1,造成各供应商针对不同标准的重复认证,这就急需要求出台一套国际通用的汽车行业质量体系标准,以 同时满足各大整车厂要求,ISO/TS16949:2009就此应运而生。
随着汽车行业复杂性的日益提升,人们加大了开发安全合规系统的力度。例如,现代汽车使用了油门线控等线控系统。驾驶 员踩油门时,踏板中的传感器将向电子控制单元发送信号。该控制单元会对多种因素进行分析,如发动机转速、车辆速度及 踏板位置,然后向油门传递指令。要测试和验证油门线控这类系统,对汽车行业来说是个不小的挑战。ISO 26262的目标是为 所有汽车E/E系统提供统一的安全标准。
ISO 26262 要求汽车原始设备制造商和供应商必须遵循并记录功能安全开发流程(从开始制定规格直到量产发布),以使其设备具备在商用车辆(轿车)内运行的资格。该标准列出了风险分类体系(汽车安全完整性等级,ASIL),旨在降低电气电子 (E/E) 系统故障行为可能造成的危害。
车规芯片可以说中国全军覆没,啥牛B都没有的,看下图:
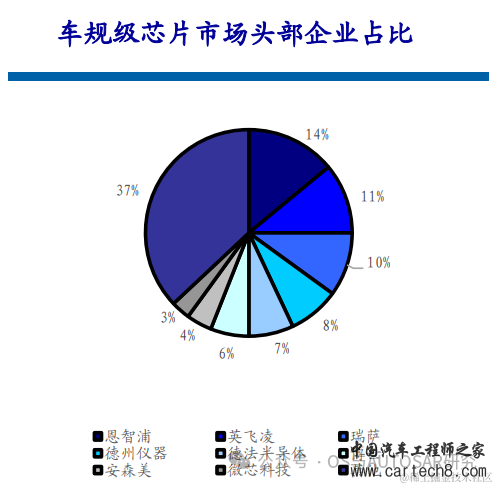
这简直是:革命还没开始,同志们还需要努力!,不过很多认证都是老外在做,做一次认证要给老外很多钱,又被割韭菜了,国内还需要建立值得信赖的认证机构,但是这根据国人的人情世故在国内做到公正估计比较难,还有如果要把汽车卖给外国人,如果其国家法规要求的认证那还是必须得去做。一步落后步步落后,话语权一旦丢失就很被动,只能先做一个给欧美大哥端茶倒水的勤奋小弟了。
2.2 三域融合芯片之路
之前的文章AUTOSAR入门-汽车电子构架演进(四) 未来已来讲到目前主要的汽车软硬件架构都是三域:车控、智驾、座舱。但是统一是迟早的事情,这个事情的根基就是芯片底座的提供,然后软件去配合。看似很遥远,国内还在用国外提供的三域技术,还在开始自研三域技术的时候,老外的核弹就已经来了!
英伟达下一代SoC:Thor
Thor的特点:一是超高AI性能,拥有770亿晶体 管,而上一代的Orin是170亿晶体管。AI性能为2000 TFLOPS@FP8。如果是INT8格式,估计可以达到4000TOPS。二是支持FP8格 式,英伟达、英特尔和ARM三家联合力推FP8格式标准,力图打通训练与推理之间的鸿沟。三是超高CPU性能,Thor的CPU可 能是ARM的服务器CPU架构V2或更先进的波塞冬平台。四是统一座舱、自动驾驶和自动泊车,一颗芯片包打天下。
高通Snapdragon Ride,自动驾驶芯片:骁龙 Ride
该平台包括安全系统级芯片SoC(ADAS应用处理器)、安全加速器(自动驾驶专用加速器)和自动驾驶软件栈,可支持L1-L5 级别的自动驾驶;安全系统级芯片SoC和安全加速器的功能安全安全等级为ASIL-D级;
3. 自动驾驶芯片架构分析
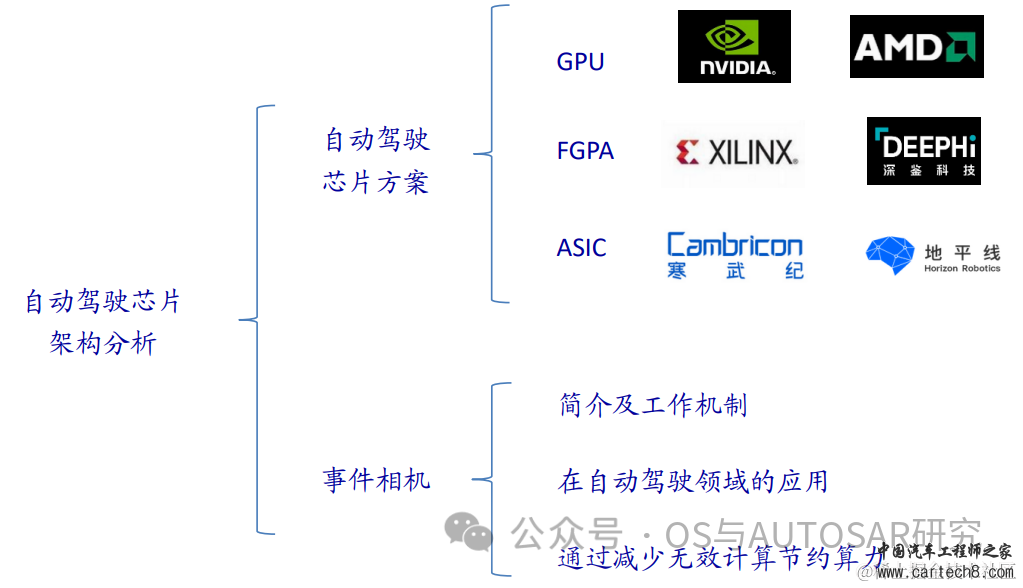
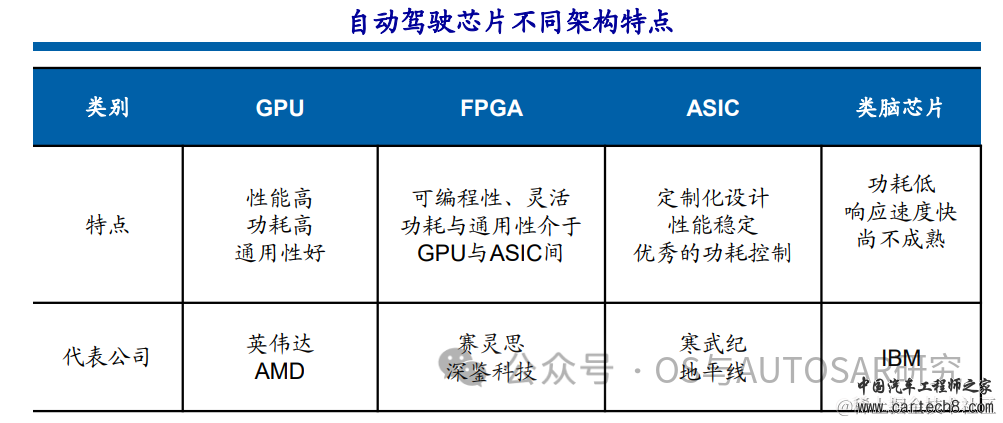
当前主流的AI芯片主要分为三类,GPU、FPGA、ASIC。GPU、FPGA均是前期较为成熟的芯片架构,属于通用型芯片。ASIC 属于为AI特定场景定制的芯片。行业内已经确认CPU不适用于AI计算,但是在AI应用领域也是必不可少。
 3.1 GPU方案
3.1 GPU方案
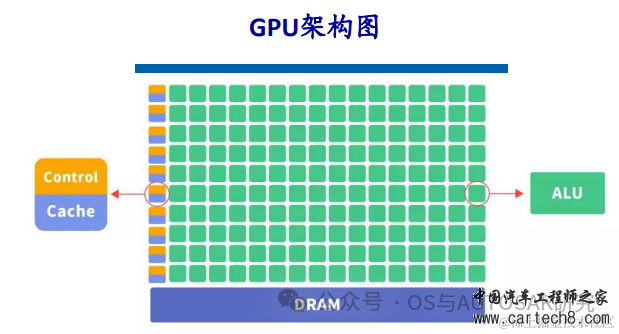
GPU与CPU的架构对比:
CPU遵循的是冯·诺依曼架构,其核心是存储程序/数据、串行顺序执行。因此CPU的架构中需要大量的空间去放置存储单 元(Cache)和控制单元(Control),相比之下计算单元(ALU)只占据了很小的一部分,所以CPU在进行大规模并行计 算方面受到限制,相对而言更擅长于处理逻辑控制。GPU(GraphicsProcessing Unit),即图形处理器,是一种由大量运算单元组成的大规模并行计算架构,早先由CPU中分出 来专门用于处理图像并行计算数据,专为同时处理多重并行计算任务而设计。GPU中也包含基本的计算单元、控制单元 和存储单元,但GPU的架构与CPU有很大不同,其架构图如下所示。与CPU相比,CPU芯片空间的不到20%是ALU,而GPU芯片空间的80%以上是ALU。即GPU拥有更多的ALU用于数据并行处理。
GPU并行计算加速:
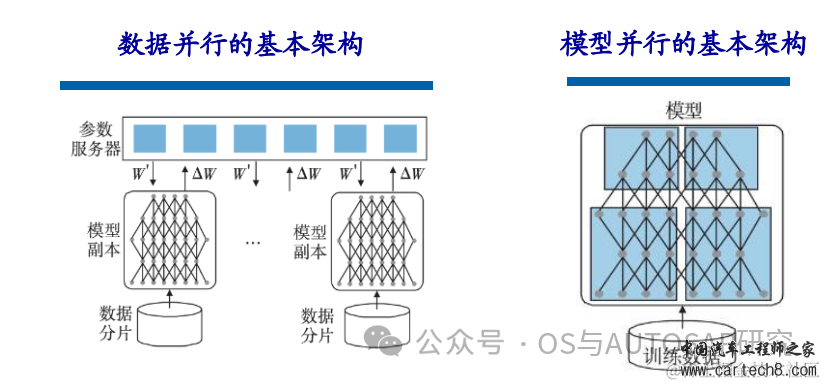
在深度学习中,当训练的模型规模比较大时,可以通过数据并行的方法来加速模型的训练,数据并行可以对训练数据做切分,同时采用 多个模型实例对多个分块的数据同时进行训练。GPU的另一个重要参数是浮点计算能力。浮点计数是利用浮动小数点的方式使用不同长度的二进制来表示一个数字,与 之对应的是定点数。在自动驾驶算法迭代时对精度要求较高,需要浮点运算支持。
3.2 FPGA方案
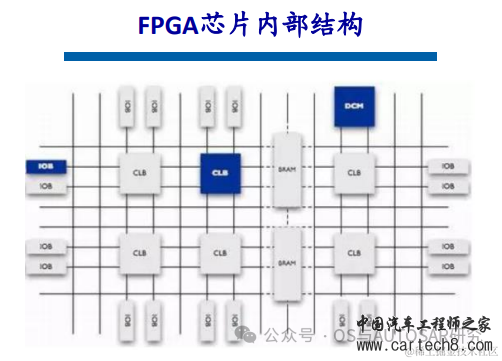
FPGA(Field-Programmable Gate Array),即现场可编程门阵列,
它是在PAL、GAL、CPLD等可编程器件的基础上进一步发展的产物。它是作为专用集成电路领域中的一种半定制电路而出现的,既解决了定制电路的不足,又克服了原有可编程器件门电路数有限的缺点。FPGA可以被反复烧写。
FPGA芯片主要由6部分完成,分别为:可编程输入输出单元、基本可编程逻辑单元、完整的时钟管理、嵌入块式RAM、丰富的布线资源、内嵌的底层功能单元和内嵌专用硬件模块。目前主流的FPGA仍是基于查找表技术的,已经远远超出了先 前版本的基本性能,并且整合了常用功能(如RAM、时钟管理和DSP)的硬核(ASIC型)模块。
FPGA的优势就是可编程,用户可以根据自己的数据和算法对硬件进行更改,来提供更加高效的硬件芯片支撑。
FPGA具备高吞吐量、高能效以及实时处理等多项优点,非常契合自动驾驶所需要的技术需求。高级辅助驾驶系统(ADAS)、 车载体验(IVE)应用的标准和要求正在快速演变,系统设计人员关注的问题主要包括出色的灵活性和更快的开发周期,同 时维持更高的性能功耗比。通过可重新编程的FPGA和不断增多的汽车级产品相结合,支持汽车设计师满足设计要求,在 不断变化的汽车行业中始终保持领先。
3.3 ASIC方案
ASIC就是专用芯片,在命名上各个公司都会给自己专用一个命名什么什么U,各种U,例如地平线的BPU,搞的跟CPU名字一样高大上,但是其实就地平线直接用这个名字BPU,别人家都不这么叫。
给芯片起名各种U也可以看到文化的差异,先抢命名,抢占商机,搞概念,拉投资,其实就是:假大空。但是如果吹牛兑现了就厉害了,可惜大多创业公司都不会成功,大多都是搞投资人钱。但是老外这一套商业结构发展了几百年,对其文化也影响很大。总之,短期利益,唯利是图。
ASIC 芯片可根据终端功能不同分为 TPU 芯片、DPU 芯片和 NPU 芯片等。其中,TPU 为张量处理器,专用于机器学习。如 Google 于 2016 年 5 月研发针对 Tensorflow 平台的可编程 AI 加速器,其内部指令集在 Tensorflow 程序变化或更新算法时 可运行。DPU 即 Data Processing Unit,可为数据中心等计算场景提供引擎。NPU 是神经网络处理器,在电路层模拟人类神 经元和突触,并用深度学习指令集直接处理大规模电子神经元和突触数据。
ASIC技术路线是有限开放,芯片公司需要面向与驾驶相关的主流网络、模型、算子进行开发。在相同性能下,芯片的面积更小、成本更低、功耗更低。ASIC技术路线未来的潜力会很大,选择ASIC路线并不意味着要对不同车型开发不同的 ASIC,或进行不同的验证。因为不同车型需要实现的功能大致相同,而且芯片面对模型和算子进行有限开放,算法快速 迭代不会影响到芯片对上层功能的支持。车厂与芯片设计公司合作,进行差异化定制,或是更好的选择。因为即使是进 行差异化的定制,芯片内部50%的部分也是通用的。芯片设计公司可以在原有版本的基础上进行差异化设计,实现部分差异功能。
另外一点,只算力高并不说明自动驾驶能力高,其还受软件的限制,以及配合硬件的性能,芯片再好,主板很烂,软件很烂,那就发挥不出来实力。这就像苹果手机一样,硬件参数不一定是最好,但是整体性能没得说。俗话说:缺啥炫耀啥。咱现在什么都缺,那就找主要的参数使劲喊我们世界第一,等大家都很好了,也就没人喊了。
4. AD域控制器设计
 4.1 基本设计流程
4.1 基本设计流程
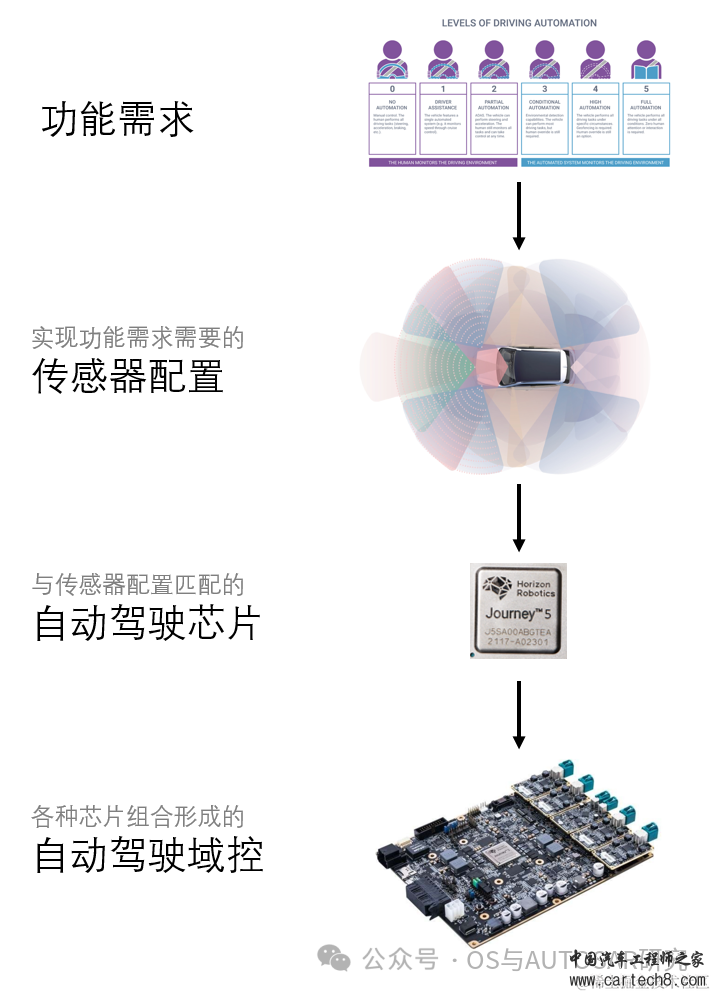
自动驾驶芯片的设计依赖客户功能需要的多少个传感器,从而去处理这些传感器的数据。
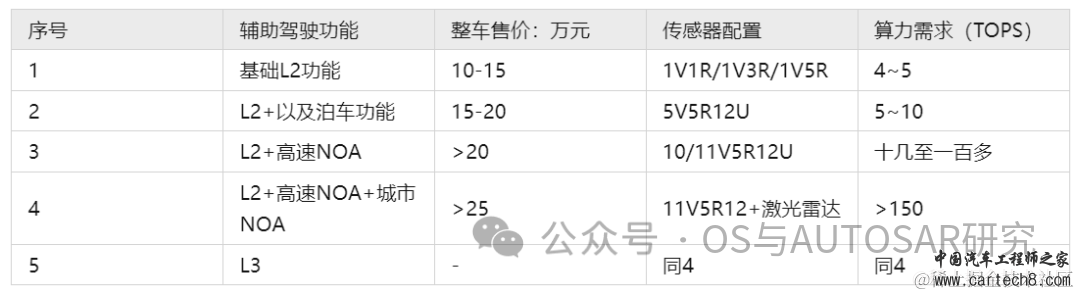
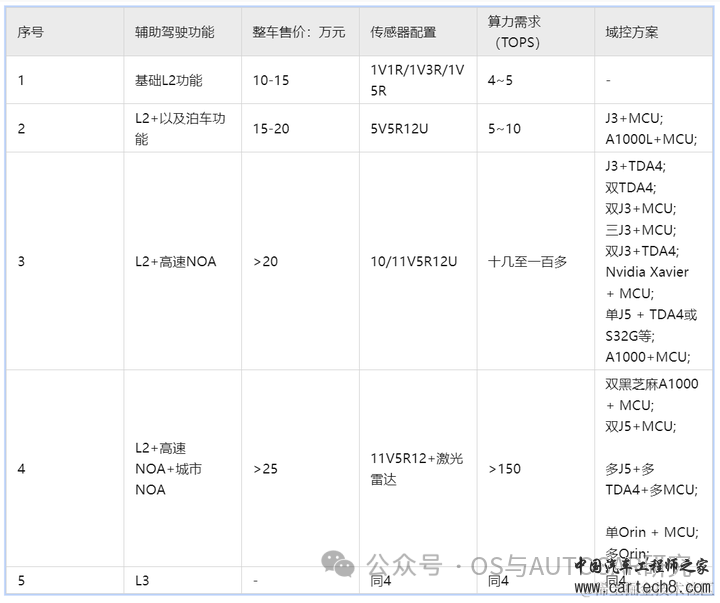
按照前面对辅助驾驶功能的分类逻辑,对应到传感器方案,我们可以延续将域控制器的算力需求归纳成几类:
1V1R/1V3R/1V5R方案:最少需要4-5 TOPS算力;5V5R12U方案:最少需要5-10 TOPS算力;11V5R12U方案:这就不好说了,各家差异很大,一般需要十几到一百多TOPS算力;11V5R12+激光雷达方案:业内一般认为最少需要150TOPS算力;
常见自动驾驶芯片汇总:
| 序号 | 公司 | 芯片 | 算力 | 制程 | 量产时间 |
| 1 | NXP | S32V | 4 | 16 | 2022 |
| 2 | TI | TDA4VM* | 8 | 16 | 2020 |
| 3 | TI | TDA4VH | 24-32 | 16 | 2023 |
| 4 | Mobileye | EyeQ5* | 24 | 7 | 2021 |
| 5 | Nvidia | Xavier* | 30 | 12 | 2020 |
| 6 | Nvidia | Orin* | 254 | 7 | 2022 |
| 7 | 高通 | Snapdragon Ride Flex 系列 | 几十至几百不等 | 5 | 2022 |
| 8 | 安霸 | CV22系列 | 等效算力10-20TOPS | 10 | 2019 |
| 9 | 安霸 | CV3-AD系列 | 等效算力500TOPS | 5 | 2022 |
| 10 | 安霸 | CV72系列 | 多种算力 | 5 | 2023 |
| 11 | 华为 | 昇腾310 | 16 | 12 | 2018 |
| 12 | 华为 | 昇腾910 | 640 | 7 | 2022 |
| 13 | 地平线 | J3* | 5 | 16 | 2020 |
| 14 | 地平线 | J5* | 128 | 16 | 2022 |
| 15 | 地平线 | J6 Family | 数百至一千 | 7 | 预计2024 |
| 16 | 黑芝麻 | A1000L | 16 | 16 | 2020 |
| 17 | 黑芝麻 | A1000 | 40 | 16 | 2020 |
| 18 | 黑芝麻 | A1000Pro | 106 | 16 | 2022 |
| 19 | 寒武纪行歌 | SD5223 | 16 | 不详 | 不详 |
| 20 | 寒武纪行歌 | SD5226 | 400 | 7 | 不详 |
| 21 | 芯驰 | V9P | 20 | 16 | 2023 |
| 22 | 零跑(大华) | 凌芯01 | 4.2 | 28 | 2020 |
| 23 | 超星未来 | 惊蛰 R1 | 16 | 不详 | 不详 |
上面提到的芯片,市场应用多的有:TDA4,EyeQ5,Xavier,Orin,J3和J5。自动驾驶芯片按算力分成几个市场:
中低算力市场:十几TOPS以下,主打一个性价比。主要玩家是地平线J3、黑芝麻A1000L、TDA4VM等,互相有很强的可替代性,基本上是杀红了眼的存在;中端算力市场:大几十到一百多TOPS,包括地平线J5、黑芝麻A1000、高通平台系列芯片等等,这个市场目前地平线J5占据了较大优势,但是高通势头很猛;高算力市场:Nvidia Orin,目前好像没什么对手。
自动驾驶域控制器典型算力需求:
 4.2 自动驾驶芯片的设计和架构
4.2 自动驾驶芯片的设计和架构
自动驾驶芯片在设计的时候,就要和主机厂、Tier1充分沟通,一定是要站在系统的角度,通盘考虑自动驾驶功能、传感器方案、整车E/E架构、软件架构、功能安全、信息安全、域控硬件设计、可测性等等之后,才能形成最优设计,这其中牵扯到几乎是汽车产业全方面的资源协调。这也是为什么我们经常在新闻里看到某芯片厂商、Tier1、整车厂又搞战略合作又搞联合发布等等。芯片设计是“攒局”,从来都不是“单打独斗"。
可以说自动驾驶SoC芯片比我们现在手机里面用的芯片复杂的多,手机的芯片已经卷的非常先进了,而智驾芯片更是一个超级大,功能更多的芯片,其设计没有非常大的实力是做不到的,国内没有几家是可以做出来的。
这里以地平线J5为例(看起来不够先进,但是基本技术点有了,明年应该会推出J6)来说下基本的技术点,系统框架图如下:
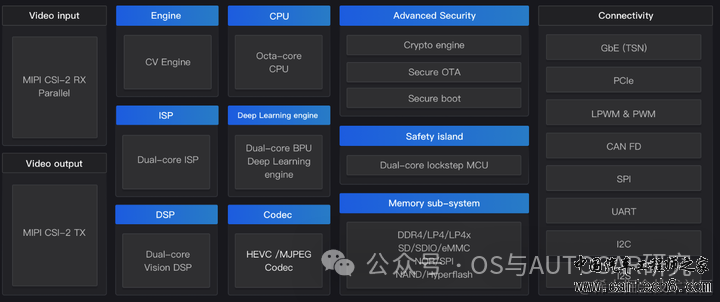
从上图我们可以看到地平线J5内部分成几个大块,也是典型的自动驾驶芯片配置。其从左到右、从上到下依次是:
图像输入/输出单元CV引擎两个ISP(Image Signal Processing)核两个DSP核8个ARM A55核构成的CPU单元两个AI深度学习计算核心BPU视频编解码单元信息安全单元锁步核MCU构成的安全岛内存和存储单元外设接口单元
其中BPU负责AI深度学习的计算,A55负责一般的逻辑计算,比如传感器融合,MCU负责进行高功能安全等级的逻辑判断、诊断等等。
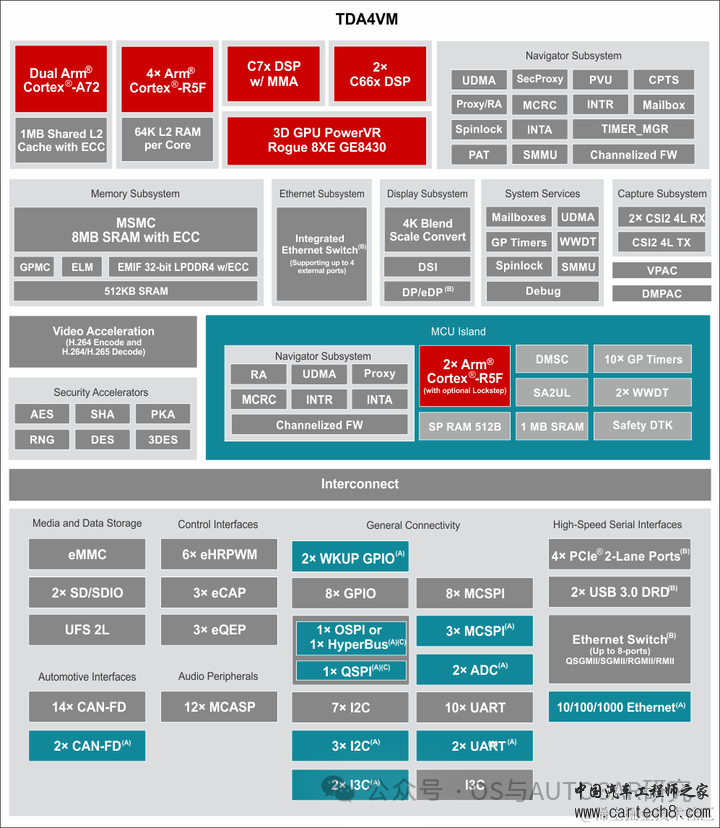
再比如从TDA4VM的系统框图中,也能看出它包含图像输入输出编解码单元、DSP核、用于进行深度学习的MMA(Matrix Multiplication Accelerator矩阵乘法加速器, 类比于地平线的BPU)、2个高性能A72核、6个R5核,其中有一对锁步R5核位于安全岛、信息安全单元、内存/存储和外设接口。这类异构SoC(将A核/R核/M核/DSP/深度学习加速器等等集成在一个SoC中)在基本单元上是有很强共性的。
 4.3 AD域控制器架构
4.3 AD域控制器架构
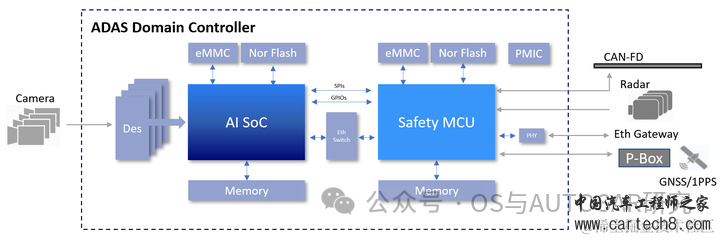
一般而言,一个自动驾驶域控包括以下部分:
自动驾驶芯片,也就是AI SoC (System on Chip),它主要用来进行摄像头图像处理,通过深度学习算法,输出目标识别列表,也可以用来实现传感器融合、轨迹预测、环境模型搭建、自车定位等功能。Safety MCU,用来进行高功能安全等级的逻辑运算。一般车辆的规划与控制、通信、诊断以及域控制器的对外接口等功能会运行在MCU中。这里有人可能会问,自动驾驶芯片中不是自带安全岛(也就是锁步核)嘛,为什么还需要外置MCU?诚然,对于一部分应用场景而言,自动驾驶芯片内置的安全岛确实够用了,这就是后面会提到的域控制器“单芯片”方案;但是对于复杂一些的场景,内置安全岛的算力就不够了,智能通过外置MCU来实现。eMMC/Nor Flash/Memory,存储芯片;Des视频解串芯片,将摄像头的原始图像解串供自动驾驶芯片处理;以太网网关芯片;各种外设接口芯片、电源管理芯片(PMIC)等。
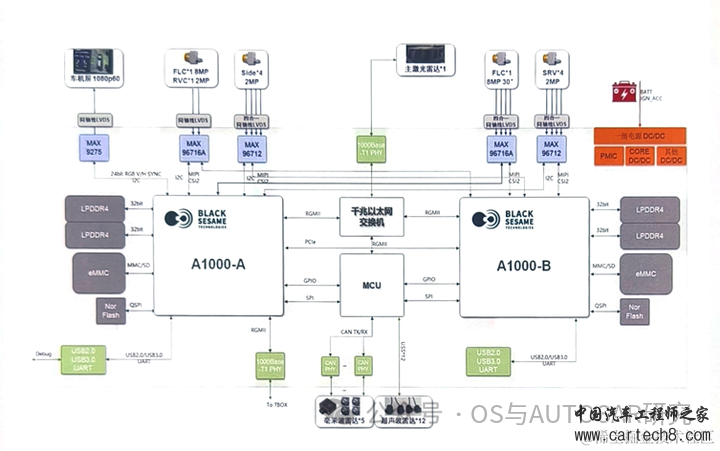
例如实现L2+高速NOA+城市NOA功能的域控制器,这个目前比较典型:实现这一层级的功能,业界普遍认为需要150T以上的算力支持。目前支持城市NOA功能的车型都配备了激光雷达,这也为域控的算力提出了更高要求。双黑芝麻A1000 + MCU是一个典型的架构,如下图:
自动驾驶域控制器方案:
 参考:
参考:
https://icv.51cto.com/posts/820https://pdf.dfcfw.com/pdf/H3_AP202301161582040854_1.pdf?1673982279000.pdfhttps://mp.weixin.qq.com/s/azesnti-8JVFvYHj2ZjvjQ
后记:
本篇文章的背景和立题非常的大,各个方面的介绍都是皮毛,例如很多的缩写名词,每一个名词展开可能都是一本书,可以遇到了再去查对应的资料。整体上比较全面可以分享给同行入门阅读。
软件国内发展的比较早,芯片基本全靠学习老外的技术支撑,显著特点就是缩写名词真的是多,代码和硬件原理图的资料少,边缘研发多,核心海归少,爱看芯片设计公众号学习的人多。做芯片研发的开会也多,反正就是大部分时间浪费在了打基础,建立共同语言上了。这方面的人才还是需要数十年的经验积累,也足见芯片发复杂,算十足的高端产业,希望有一天能简化这些芯片开发流程,顺便把价格打下来。
“啥都懂一点,啥都不精通,
干啥都能干,干啥啥不是,
专业入门劝退,堪称程序员杂家”。
欢迎各位有自己公众号的留言:申请转载!
纯干货持续更新,可以就分享给朋友、点赞、收藏、在看、划线和评论交流!
重要(捧场):
下面的一些家用必备商品是博主thatway精选的:自己家里都买过(可能不是下面的这个店,但是类似的商品即便宜又实用,且家庭必须),咱程序员群体肯定要追求性价比的,博主也是拼多多的深度屌丝用户,必须全网非常便宜的。
10+元买不吃亏,家里需要了就点开带一个。同时也会给博主一些提成算共赢支持下

 |手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 )
|手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 ) 自动驾驶芯片入门-基础概念和架构w20.jpg
自动驾驶芯片入门-基础概念和架构w20.jpg