汽车后轮转向的“前世与今生”
作者|北湾南巷出品|汽车电子与软件在汽车技术飞速发展的今天,后轮转向技术正成为提升车辆性能和安全性的关键。本文将带您深入了解后轮转向的概念、工作原理以及它在现代汽车技术中的重要性。后轮转向技术的应用和发 ...
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
 作者 | 北湾南巷出品 | 汽车电子与软件 在汽车技术飞速发展的今天,后轮转向技术正成为提升车辆性能和安全性的关键。本文将带您深入了解后轮转向的概念、工作原理以及它在现代汽车技术中的重要性。  后轮转向技术的应用和发展历程反映了汽车工业在追求更优操控性能和安全性方面的不懈努力。这一技术的发展经历了多个阶段,从最初的概念验证到现代的广泛应用。后轮转向技术是现代汽车技术中的一个重要创新,它通过改变后轮的转向角度,以增强车辆的操控性、稳定性和灵活性。这项技术的引入,标志着汽车动力学和操控性能的一次重大进步。 #01 后轮转向的应用和发展历程后轮转向技术的应用和发展历程反映了汽车工业在追求更优操控性能和安全性方面的不懈努力。这一技术的发展经历了多个阶段,从最初的概念验证到现代的广泛应用。 1.初期探索(20世纪初期):后轮转向的概念最早可以追溯到20世纪初期。当时的汽车设计师和工程师们开始探索如何通过让后轮参与转向来提高车辆的操控性和灵活性。然而,由于技术和成本的限制,这些早期的尝试并未得到广泛的应用。2.技术发展(20世纪中后期):在20世纪中后期,随着电子和计算机技术的发展,后轮转向技术开始获得更多的关注。一些高端汽车制造商,如宝马和保时捷,开始在他们的高性能车型中尝试应用后轮转向技术。这些早期的应用主要集中在提高车辆的赛道性能上。3.商业化应用(21世纪初期):进入21世纪,后轮转向技术开始逐渐商业化。随着技术的成熟和成本的降低,这一技术开始出现在更多的量产车型中,尤其是高端汽车品牌。此时,后轮转向不仅仅是为了提高车辆的性能,也开始被用于提升日常驾驶的便利性和安全性。4.现代应用(21世纪10年代至今):在现代,后轮转向技术已经相当成熟,被广泛应用于各种类型的车辆中,包括豪华轿车、SUV和超级跑车。这项技术不仅提高了车辆的操控性和灵活性,还显著增强了高速行驶时的稳定性和安全性。随着自动驾驶技术的发展,后轮转向在提高车辆的路径跟踪能力和整体稳定性方面发挥着越来越重要的作用。 #02 后轮转向的分类在传统的汽车设计中,只有前轮负责转向,而后轮则是固定的。后轮转向技术的核心在于,它使后轮也能够根据特定的驾驶条件进行转向。这种转向可以是与前轮同向(提高高速稳定性)或反向(增加低速灵活性),甚至可以是独立于前轮的转向(提高操控性)。  后轮转向示意图 后轮转向技术主要可以分为两大类:被动转向和主动转向。这两类后轮转向技术各有特点,适用于不同的车辆类型和驾驶场景。 2.1、被动转向(Passive Rear Steering):被动后轮转向(Passive Rear Steering)是一种不需要电子控制单元(ECU)或电机等电子设备介入的后轮转向技术。与主动后轮转向(Active Rear Steering)相比,被动后轮转向不提供实时调整后轮角度的能力,而是依赖于车辆设计中的几何关系和动态特性来实现后轮的转向效果。这种系统结构相对简单,成本较低,不需要复杂的电子控制单元。但它提供的转向效果有限,且无法根据不同的驾驶条件进行调整。 被动后轮转向的工作原理通常与车辆的悬挂系统、车轮定位和车轮几何有关。 以下是一些实现被动后轮转向的方法:
被动后轮转向的主要优点是系统简单,不需要复杂的电子设备和控制系统,因此在一些传统的车辆设计中得到应用。然而,这种转向方式通常不如主动后轮转向灵活,也无法根据不同的驾驶条件进行实时调整。被动后轮转向在某些高性能车辆中也有应用,如赛车的设计中,通过悬挂系统的特殊设计来实现后轮的转向效果,以提高车辆的操控性和稳定性。此外,一些高性能的改装车辆也会采用被动后轮转向的策略,以优化车辆的驾驶性能。 2.1.1 典型被动后轮转向系统应用: Saab ReAxs 是一种独特的被动后轮转向系统。这个系统在车辆行驶过程中自动调整后轮的角度,以提高车辆的操控性和稳定性。ReAxs 系统特别设计用于改善车辆的转向反应和整体操控性能,特别是在高速行驶和紧急避让情况下。通过这种设计,Saab 车型能够在保持舒适性的同时,提供更加精准和稳定的驾驶体验。通过采用四连杆后悬挂布局,工程师们能够通过精心调整内外悬挂衬套,调校出独特的被动后轮转向特性(Saab ReAxs)。这种设计提高了车辆的操控性和稳定性,特别是在高速行驶和紧急避让情况下。通过这种方式,Saab 9-3不仅提高了安全性,还提升了整体的驾驶体验。   INFINITY IF14的被动后轮转向套装是一种专为电动巡回赛车设计的系统。这个系统通过调整后轮胎的束角角度来优化车辆的转弯性能,具体是根据后悬挂的行程位置来调整。此外,通过改变连杆的安装角度,可以微调后轮的束角。转向块的高度也有两个可调节的位置,这使得可以根据赛道条件和布局来调整翻滚中心,从而提高车辆在不同赛道上的性能。2.2、主动转向(Active Rear Steering): 主动后轮转向(Active Rear Steering)是一种高级的汽车转向技术,它允许车辆的后轮在行驶过程中根据特定的条件进行转向。这种转向可以是与前轮同向或反向,甚至可以独立于前轮的转向。主动后轮转向的主要目的是提高车辆的操控性、稳定性和灵活性,从而提升驾驶体验和行车安全。 其工作原理基于先进的电子控制技术,它允许后轮在车辆行驶过程中根据不同的条件进行转向。这一系统通常包括传感器、控制单元和执行机构三个主要部分。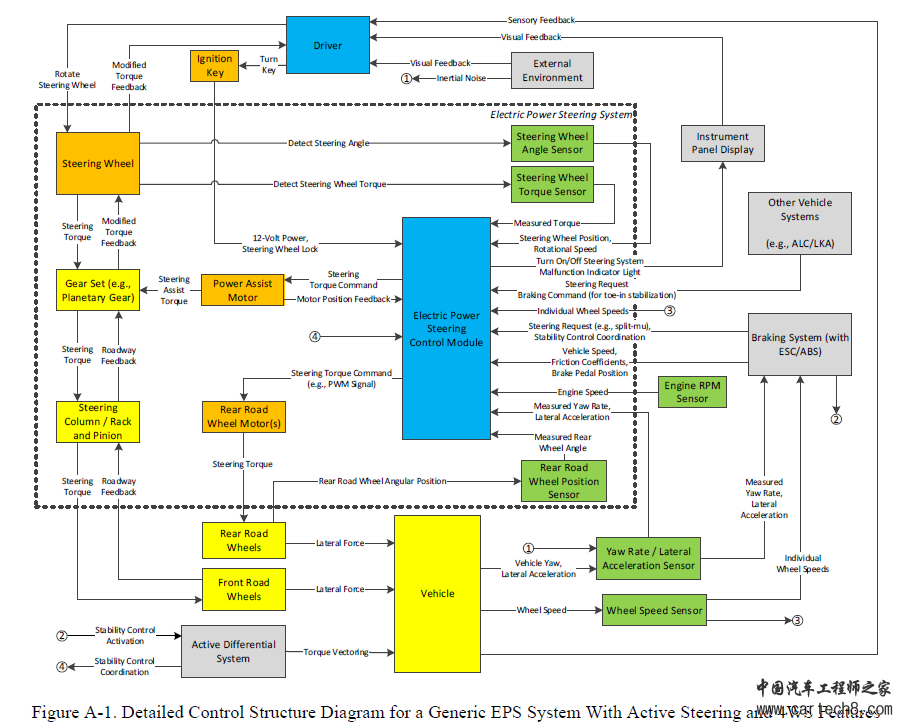 含后轮转向的系统框架简图带有后轮转向功能的车辆可以调整前轮和后轮以转向车辆。这可以实现更大的响应性和提高稳定性。 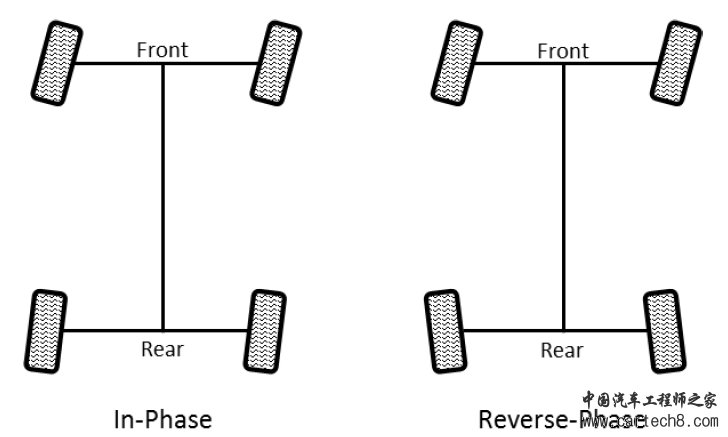 车辆的后轮方向可以由位于每个车轮的独立电机或后轴上的单个电机控制。后轮可以与前轮同向旋转(“同相位”)以在高速行驶时提供更稳定的操控。在低速时,后轮也可以与前轮反向旋转(“反相位”)以改善转弯。 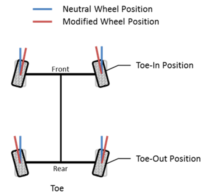 最后,在紧急刹车时,后轮可能会“内八字”以提高稳定性。根据后轮执行器的实现方式,可用的后轮配置可能受到限制(例如,集中式后轮转向可能无法提供“内八字”位置)。 2.2.1 主动后轮转向的系统构成包括:1、传感器:这些传感器负责收集车辆的实时数据,如车速、转向角度、车辆动态等。这些数据是后轮转向系统决策的基础。这些传感器可以是轮速传感器、转向角度传感器、横向加速度传感器等。 从含后轮转向的系统框架简图中可以看出,后轮转向行程位置传感器的质量好坏决定了性能表现,对后轮位置传感器的功能安全目标诸如: (1)后轮位置传感器旨在在所有车辆运行条件下测量/检测后轮的位置。测量的后轮位置需要经过验证以确认其有效性和正确性。 如:如使用注入故障法:
这些故障案例涉及的后轮位置传感器是电子助力转向(EPS)系统的重要组成部分,用于提供后轮的位置信息。如果这些传感器出现故障或存储了错误的数据,可能会导致EPS系统无法准确地控制车辆的转向,从而影响车辆的操控性和安全性。因此,这些故障案例需要通过严格的测试和验证来确保传感器的可靠性和准确性。 (2)后轮位置传感器应具备诊断功能,以检测由电磁兼容性/电磁干扰(EMC/EMI)、静电放电(ESD)、污染、单事件效应以及其他环境条件引起的与安全相关的故障。如:EPS(电动助力转向)后轮位置传感器电路包括 以下几种故障类型:
这些故障类型可能会导致转向系统无法准确控制后轮,从而影响车辆的操控性能和安全性。因此,对于EPS后轮位置传感器电路,需要进行严格的测试和验证,以确保其可靠性和准确性。同时,车辆制造商和维护人员应定期检查和维护传感器电路,以防止这些故障的发生。
(3)单点后轮位置传感器硬件故障都应在故障检测间隔内被检测到,并在故障探测与响应间隔(FTTI)内得到缓解。 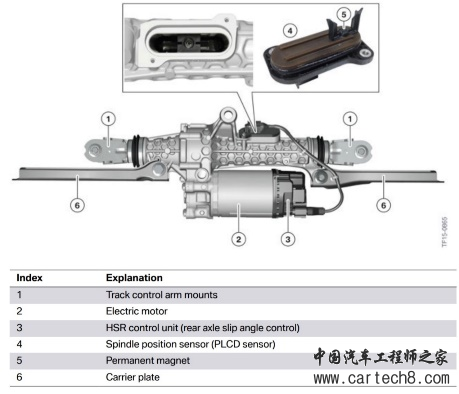 用于电动后轮转向的行程位置传感器 该传感器引起的风险如:
表中的第一个故障模式描述了后轮位置传感器(例如,内部短路)的硬件故障。如果后轮位置传感器向EPS控制模块提供错误的数据,EPS控制模块可能会认为它在使后轮居中,而实际上它正在将它们移出中心位置。 表中的第二个故障模式描述了其他车辆组件的电磁干扰(EMI)或静电放电(ESD)如何影响从后轮位置传感器到EPS控制模块的连接。如果这影响了后轮位置的测量,EPS可能会错误地控制后轮的位置。 2、控制单元(ECU):控制单元是后轮转向系统的“大脑”。它接收传感器的数据,收集到的数据被发送到车辆的中央控制单元(ECU),也就是车辆的“大脑”。ECU根据这些数据以及预先设定的算法,计算出后轮应该转动的角度和方向。 3、执行机构:执行机构负责根据ECU的指令调整后轮的角度。后轮转向执行机构通常是一套电动或液压驱动的转向机构,它根据ECU的指令来调整后轮的角度,在电动转向系统中,通常使用电动机来驱动转向齿轮或转向拉杆,从而改变后轮的方向。 4、转向模式:主动后轮转向系统可以根据不同的驾驶条件,自动或手动切换不同的转向模式,如高速模式、低速模式和中性模式。 后轮转向系统可以根据不同的驾驶条件,自动或手动切换不同的转向模式:
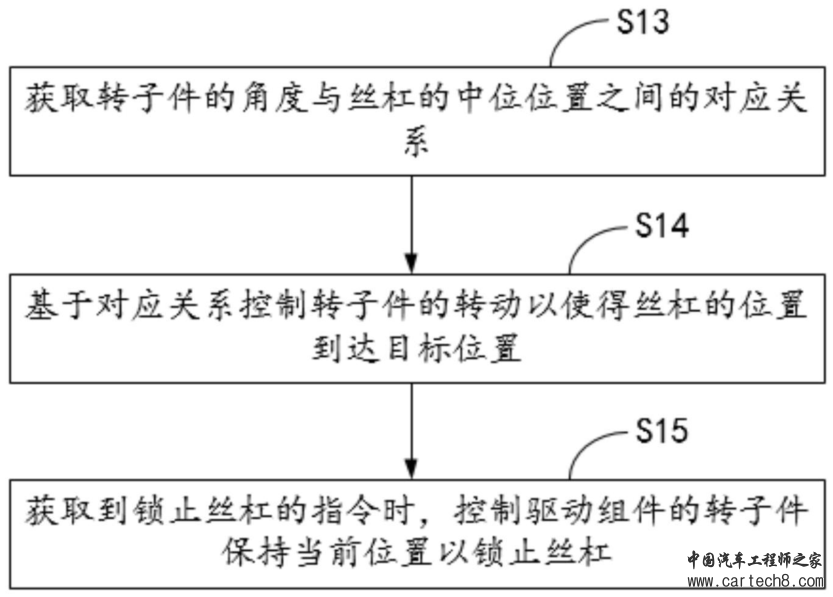
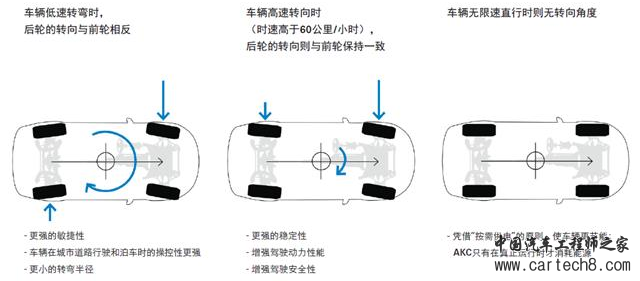 ZF_AKC原理介绍简图5、动力源:主动后轮转向系统需要电源来驱动其执行机构。这可以是车辆的电池系统,或者是一个专门的后轮转向电源。 6、通信网络:后轮转向系统需要与其他车辆系统(如刹车系统、加速系统和稳定控制系统)进行通信,以确保车辆的整体协调和性能。 7、用户界面:在一些车型中,后轮转向系统可能包括一个用户界面,允许驾驶员根据个人偏好调整后轮转向设置。 主动转向系统使用电子控制单元(ECU)来控制后轮的转向角度。ECU根据车辆的实时数据(如车速、转向角度、车辆动态等)来调整后轮的转向。这种系统可以提供更加灵活和动态的转向响应,能够根据不同的驾驶条件(如高速行驶或低速泊车)自动调整后轮转向策略。它通常提供更好的操控性和驾驶体验,但成本和复杂性相对较高。 2.2.2 典型主动后轮转向应用:主动后轮转向技术在现代汽车中扮演着至关重要的角色。它不仅提升了车辆的操控性和安全性,还为驾驶者提供了更加舒适和愉悦的驾驶体验。随着这项技术的不断发展和普及,未来将有更多的汽车配备主动后轮转向功能,为驾驶者带来更加安全、舒适和愉悦的驾驶体验。 在主动转向系统中,还可以进一步细分为不同的类型,如电动后轮转向系统、液压后轮转向系统等,这些系统在执行机构和控制方式上有所不同。#03 电液后轮转向系统电液后轮转向系统是一种独立的按需供电系统,专为后轴设计。在一辆重型商用车辆中,可以安装多达三个甚至更多的后轴转向系统。这些系统将液压缸单元与电子动力单元相结合,以实现高效、精准的转向控制。 电液转向系统的主要特点包括:1. 按需供电:系统仅在需要时激活,这有助于节省能源并提高效率。2. 多系统兼容性:在一辆车上可以安装多个后轴转向系统,这为大型商用车辆提供了更高的灵活性和操控性。3. 液压与电子结合:液压缸单元提供强大的转向力,而电子动力单元则确保精确控制。4. 应用范围广:这种系统特别适用于需要高精度操控的重型车辆,如大型卡车、挂车和特殊用途车辆。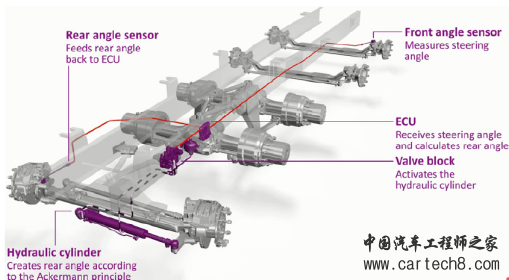 VSE Truck 后轮转向 电液转向系统的设计旨在提高车辆的操控性、稳定性和安全性,尤其是在复杂的驾驶条件下,如狭窄的街道或急转弯。通过精确控制后轴的转向,这些系统有助于减少车辆的转弯半径,提高敏捷性,并增强高速行驶时的稳定性。#04 电液后轮转向案例博世(Bosch)的电液后轮转向系统是一种先进的车辆动态控制系统,它结合了电子和液压技术,用于提高车辆的操控性和灵活性。这种系统通过电子控制的方式调整后轮的转向角度,从而优化车辆在低速和高速行驶时的性能。 Bosch_用于商用车系统的电液后轮转向系统博世电液后轮转向系统的主要特点包括: 1.电子控制:系统通过电子传感器和执行器实时监测和调整后轮的转向角度,以适应不同的驾驶模式。 2.提高操控性:在低速行驶时,后轮与前轮相反方向转向,减少转弯半径,提高车辆的敏捷性。而在高速行驶时,后轮与前轮同方向转向,增加车辆的稳定性。 3.增强稳定性:在高速变道或受到侧风影响时,系统能够自动调整后轮转向,帮助车辆保持直线行驶,提高驾驶安全性。 4.适应性:系统适用于多种类型的车辆,包括乘用车、商用车和特种车辆,以提高其操控性能和驾驶体验。 博世电液后轮转向系统通过其先进的电子控制技术和精密的液压执行机构,为车辆提供了更高的操控性能和驾驶体验,特别是在复杂的驾驶环境中。这种系统在提高车辆的动态性能和驾驶安全性方面发挥着重要作用。 #05 电动后轮转向系统电动后轮转向系统是一种先进的车辆动力学控制系统,它使用电动执行器来调整后轮的转向角度。这种系统可以显著提高车辆的操控性、稳定性和灵活性,特别是在不同的行驶速度和复杂的驾驶条件下。 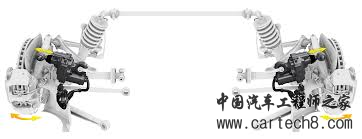  电动后轮转向 电动后轮转向系统的主要特点包括: 1.电动执行器:系统使用电动执行器来精确控制后轮的转向角度,这些执行器响应速度快,控制精度高。 2.提高操控性:在低速行驶时,后轮与前轮相反方向转向,减少转弯半径,提高车辆的敏捷性。而在高速行驶时,后轮与前轮同方向转向,增加车辆的稳定性。 3.增强稳定性:在高速变道或受到侧风影响时,系统能够自动调整后轮转向,帮助车辆保持直线行驶,提高驾驶安全性。 4.适应性:电动后轮转向系统适用于多种类型的车辆,包括乘用车、商用车和特种车辆,以提高其操控性能和驾驶体验。 应用后轮转向目前已在行业内实施,其主要优势有两个: 1.第一个优势是在低速时的更易操作性和更好的敏捷性。通过让前轮和后轮向相反方向转向,有效地缩短了轴距。这在停车场的操作中非常有帮助,但平行停车需要练习。所有车辆都可以通过这种方式得到改进,但对于长轴距的车辆来说,这种改进尤为明显。   智己_L6 电动后轮转向系统通过其先进的电子控制技术和精密的电动执行机构,为车辆提供了更高的操控性能和驾驶体验,特别是在复杂的驾驶环境中。这种系统在提高车辆的动态性能和驾驶安全性方面发挥着重要作用。 #06 电动后轮转向案例ZF AKC(Active Kinematics Control)是ZF(采埃孚)公司开发的一种先进的主动后轴转向系统。这种系统通过电子控制的方式,能够根据不同的驾驶条件自动调整后轮的转向角度,从而提高车辆的操控性、稳定性和灵活性。 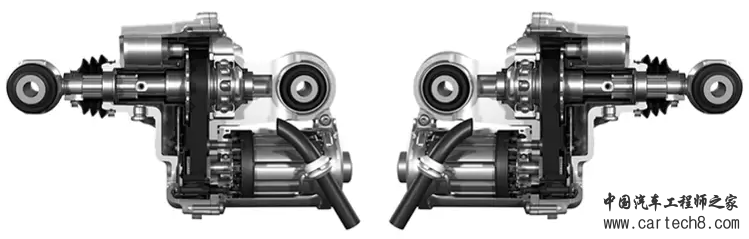 分布式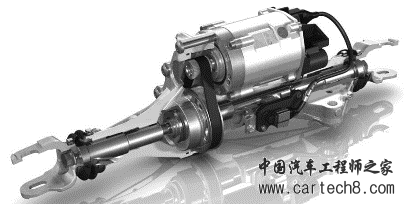 中央式ZF AKC系统的主要特点包括:1. 主动转向控制:系统通过电子传感器和执行器实时监测和调整后轮的转向角度,以适应不同的驾驶模式,如泊车、高速行驶和紧急避让。2. 改善操控性:在低速行驶时,后轮与前轮相反方向转向,减少转弯半径,提高车辆的敏捷性。而在高速行驶时,后轮与前轮同方向转向,增加车辆的稳定性。3. 提高稳定性:在高速变道或受到侧风影响时,系统能够自动调整后轮转向,帮助车辆保持直线行驶,提高驾驶安全性。4. 适应性强:ZF AKC系统能够适应不同的车辆类型和驾驶条件,提高车辆的适应性和舒适性。ZF AKC系统通过其先进的电子控制技术和精密的机械设计,为车辆提供了更高的操控性能和驾驶体验,特别是在复杂的驾驶环境中。这种系统广泛应用于高端汽车品牌,以提高其车辆的动态性能和驾驶安全性。#07 后轮转向机械结构由于讲解后轮转向机械机构的资料较少,以重庆赛力斯新能源汽车设计院有限公司公开的发明专利《车辆、后轮转向组件及控制方法》讲解下后轮转向机械结构,背景技术为:车辆的后轮转向组件与车辆的后轮连接,用于控制车辆的后轮进行转动,进而配合车辆的前轮实现转向。后轮转向组件中的丝杠可能会受到外力作用而引起后轮角度变动,这种被动变动会引起车辆跑偏、高速可能引起车辆失稳。此时,需要对丝杠及逆行锁定。 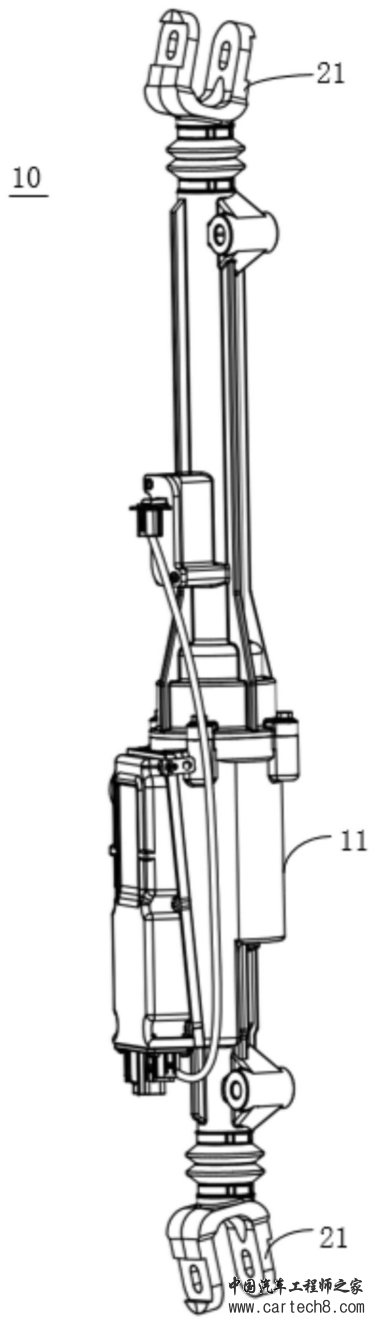 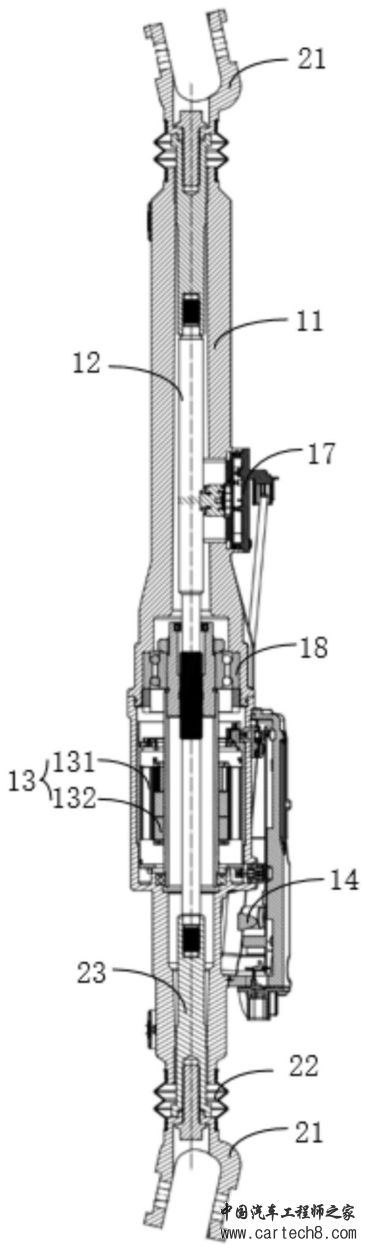 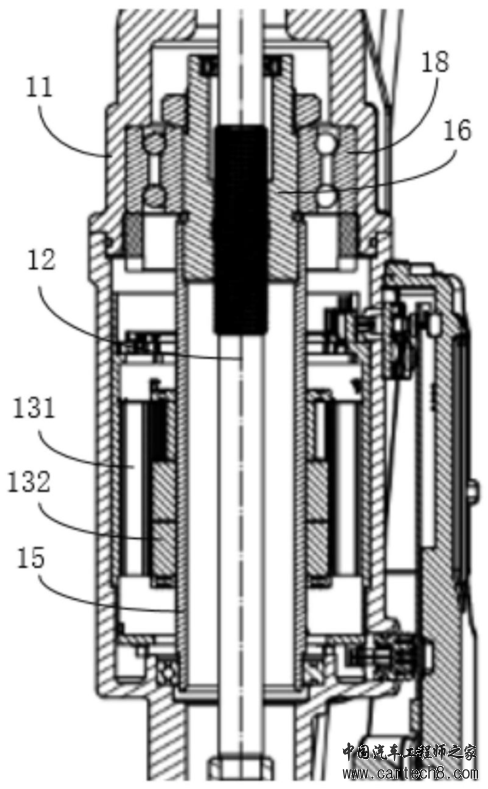 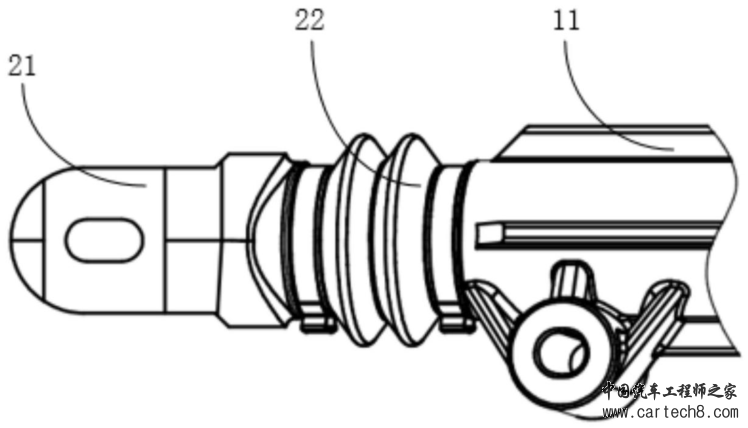
其控制逻辑如下: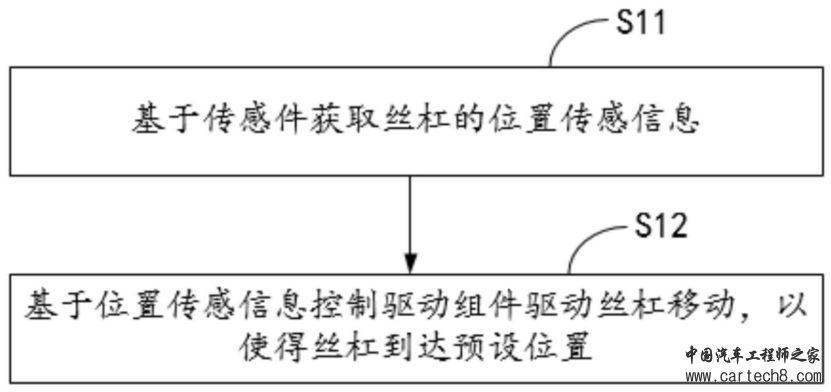 这项技术能够根据车辆在不同工况下的具体转向需求,灵活调整后轮的转角,从而提高车辆的操控性和稳定性。 重庆赛力斯与华为合作推出的全景智慧旗舰SUV AITO问界M9采用后轮转向技术的车型#8 小 结后轮转向技术在现代汽车中的重要性体现在多个方面,它不仅提升了车辆的操控性和灵活性,还显著增强了车辆的安全性和驾驶体验。 1. 提高操控性和灵活性:后轮转向使车辆能够更快速地响应转向指令,尤其是在低速行驶时。这种快速响应提高了车辆的操控性和灵活性,尤其是在泊车和城市驾驶中,可以显著减小车辆的转弯半径,使操作更加便捷。 奔驰_后轮转向2. 增强高速稳定性:在高速行驶时,后轮与前轮同向转向,有助于车辆更好地抵抗侧风和路面不平的影响,减少侧滑和失控的风险。这种稳定性对于提高车辆的安全性和驾驶信心至关重要。 雷诺_后轮转向3. 提升驾驶安全性:后轮转向技术在紧急避障或快速变道时,可以提供更好的车辆响应,帮助驾驶员更快地控制车辆,从而提高驾驶安全性。 奥迪_后轮转向4. 适应不同驾驶模式:现代汽车往往配备多种驾驶模式,如运动模式、舒适模式等。后轮转向可以根据不同的驾驶模式调整转向策略,以适应不同的驾驶需求和偏好。5. 推动汽车技术创新:后轮转向技术的引入和应用,推动了汽车动力学和操控性能的一次重大进步。它预示着未来汽车将更加智能化、灵活和安全。 创新型的分布式转向6. 支持自动驾驶技术的发展:随着自动驾驶技术的不断发展,后轮转向成为实现更高水平自动驾驶的关键技术之一。它有助于提高自动驾驶车辆的路径跟踪能力和整体稳定性。总之,后轮转向技术在现代汽车中扮演着至关重要的角色。随着汽车技术的发展,后轮转向技术正变得越来越智能化和精细化,能够更好地适应不同的驾驶场景和驾驶者的需求。未来,后轮转向技术预计将继续发展,成为提高车辆性能和安全性的重要手段。它不仅提升了车辆的操控性和安全性,还为驾驶者提供了更加舒适和愉悦的驾驶体验。随着这项技术的不断发展和普及,未来将有更多的汽车配备后轮转向功能,为驾驶者带来更加安全、舒适和愉悦的驾驶体验。END | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论