分布式架构中的整车控制器设计开发
一、功能及网络架构确定关于整车控制器的相关功能在之前的文章中曾有讨论,这里便不再赘述了。在分布式电子电气架构中,由于节点之间所传输的数据量相对较小,因此具有高带宽、高传输速率的以太网等相关车载通信技术 ...
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
| 一、功能及网络架构确定 关于整车控制器的相关功能在之前的文章中曾有讨论,这里便不再赘述了。 在分布式电子电气架构中,由于节点之间所传输的数据量相对较小,因此具有高带宽、高传输速率的以太网等相关车载通信技术在此环境中鲜有应用,此时的整车控制器主要采用基于CAN总线技术去实现与各子系统间的协调与控制,以此提高新能源汽车的能量利用率,从而确保车辆运行的安全与稳定。其网络架构示意如下: 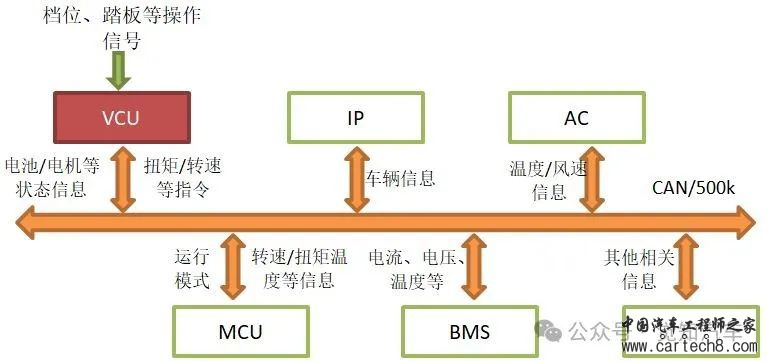 图1 基于CAN总线的分布式网络架构 二、开发流程确定 此类车载控制单元属于传统类控制器,其软硬件具有一旦冻结便不会轻易更新的特点,基于此产品特性,业内常采用基于V模型的开发方式进行。又由于控制单元相对于整车层面而言仅是一个零部件,因此该产品在主机厂端与开发商端的开发工作流程稍有差异,其中主机厂主要以整车为平台进行产品开发验证,其大体过程模型如下: 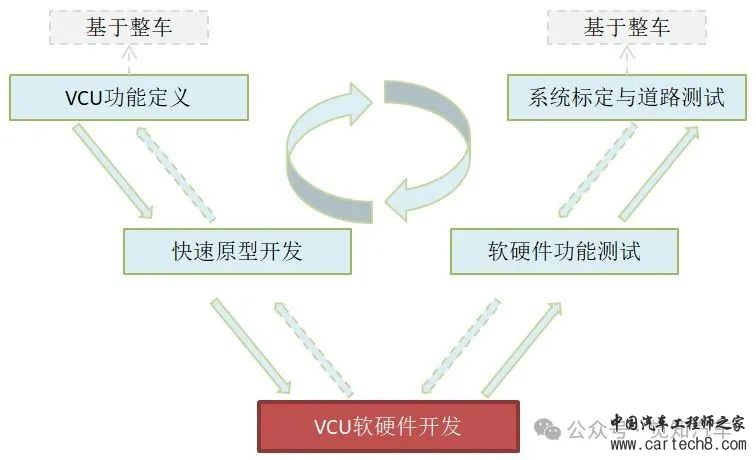 图2 整车层面零部件开发V模型示意 在开发商端,其主要需求来源于主机厂,通过分解具体需求后,形成软件、硬件以及结构等不同的子类产品开发,并在基于产品基本功能可实现的前提下,以安全为第一输入需求,形成如下开发流程: 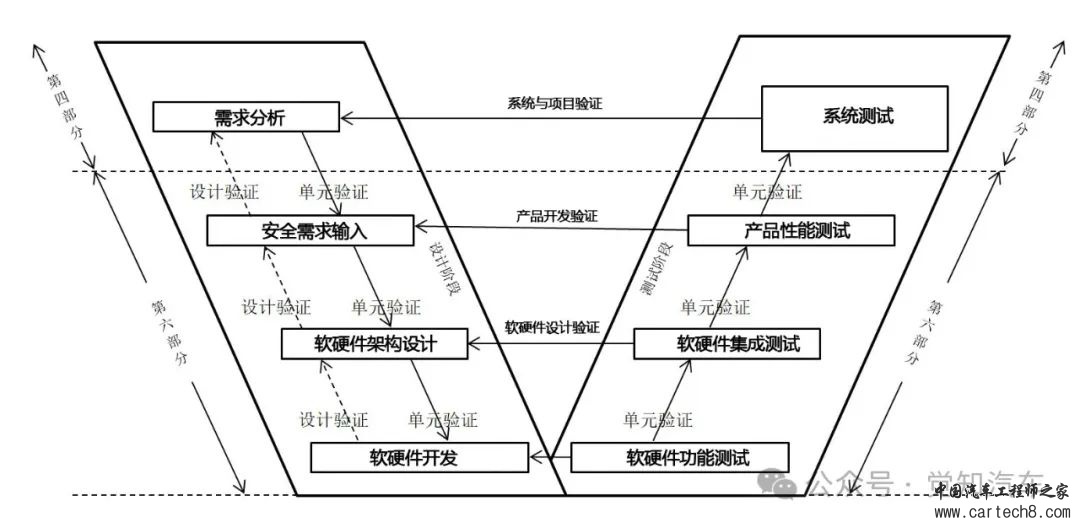 图3 基于V模型的控制器开发流程示意 其中,不同子类产品根据开发流程及实际要求再另行细化相关工作,以形成子项目或分项目。 三、整车控制器常规设计需求 在整车控制器的开发设计中,常规技术需求主要包含硬件需求、软件需求、结构需求以及其他开发需求,其中硬件需求根据车载的应用,对控制器的外围驱动、内存、安全等级等提出相应需求,其内容示意如下所示: 表1 整车控制器硬件需求示意  软件需求包含基础软件以及应用软件两部分,其中应用软件主要指控制器实际控制功能的实现,而基础软件则根据整车应用的不同,可按模块进行需求提交,此两部分内容示意如下: 表2 整车控制器软件需求示意 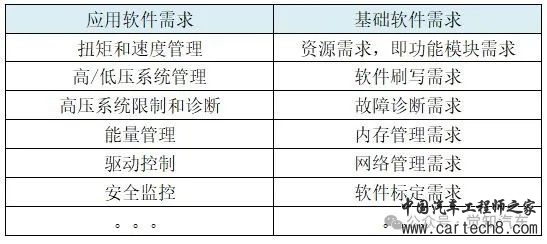 在软件开发过程中,对于其开发过程、开发工具以及开发方式可如下定义,并可对相关软件开发提出具体标准,示意如下: 1)控制策略模型基于MATLAB\Simulink开发; 2)支持MATLAB\Simulink图形化配置全部底层软件; 3)基于UDS的Bootloader程序更新功能需符合某某《Bootloader刷写需求规范》; 4)网络管理功能需符合某某《网络管理需求规范》; 。。。 结构及其他需求可根据车载应用的不同进行需求提交,如产品尺寸、防护等级、DV试验内容、材质要求、使用环境及寿命要求等,其内容示意如下: 表3 整车控制器其他开发需求示意  在完成主要技术需求输入后,需对开发周期及任务进行合理分配,同时完善产品的质量要求,通过将以上内容整合后,便可形成了一份针对分布式整车控制器设计开发的需求文件,基于此文件便可按照相关流程对产品进行开发工作。对上述内容整理如下图所示: 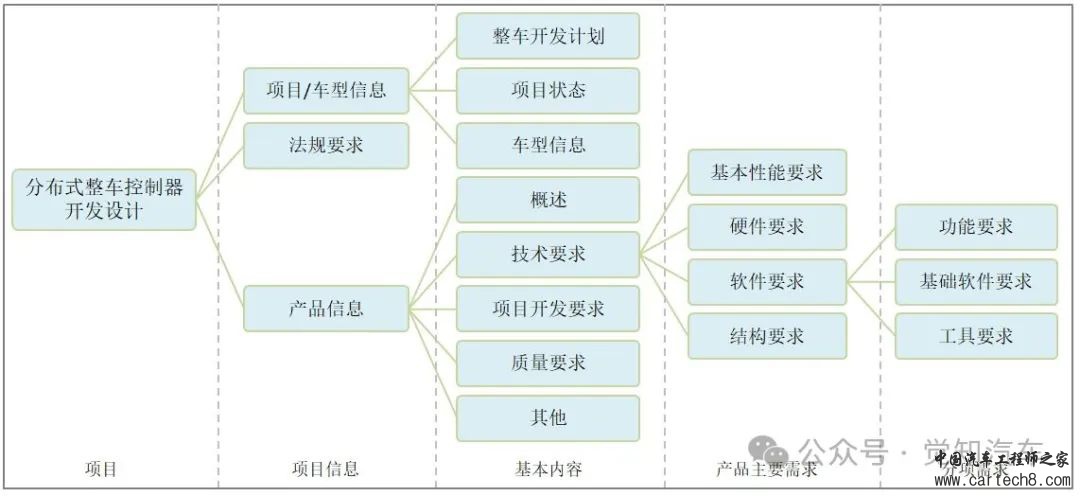 图4 分布式整车控制器开发需求示意 四、整车控制器软/硬件功能测试需求 整体测试流程依循V模型,硬件测试主要指对产品的硬件端口/功能进行测试,其测试内容可包含电源、I/O口的输入/输出、驱动能力以及通信等,软件功能测试包含控制逻辑测试、接口测试、功能测试等,具体需根据整车相关需求进行。在分别完成子项测试后,软硬件将进行联合测试,即软硬件集成后的测试工作,最后根据需要可能会再对控制单元进行系统测试。示意如下: 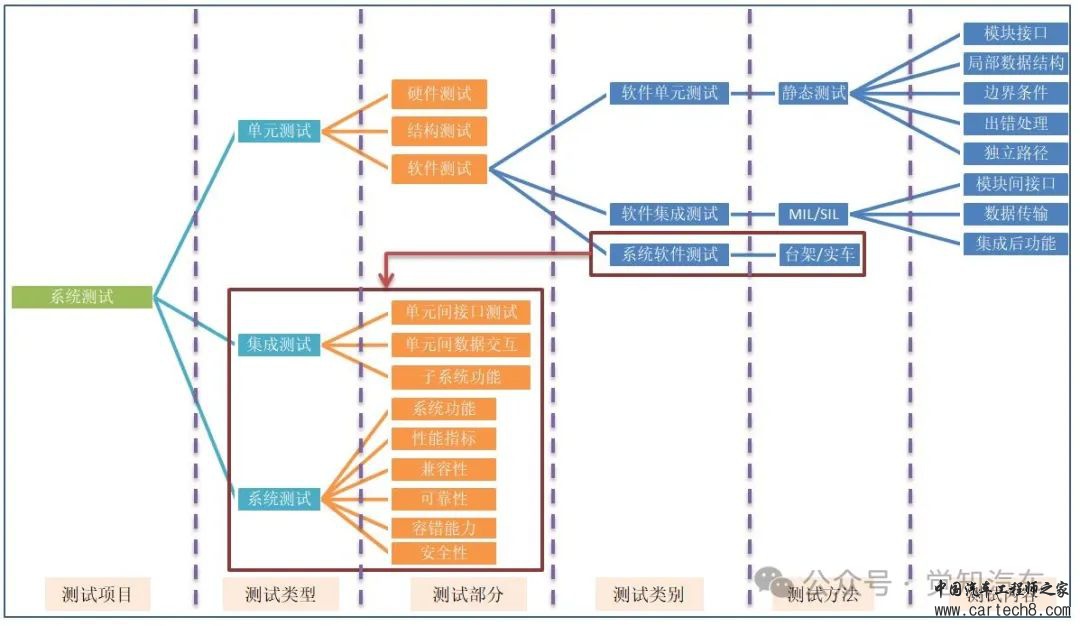 图5 产品开发测试层级及内容示意 五、系统标定需求 基于CCP(CAN Calibration Protocol)协议对整车控制单元及相关需求参数进行标定,其架构框图如下示意: 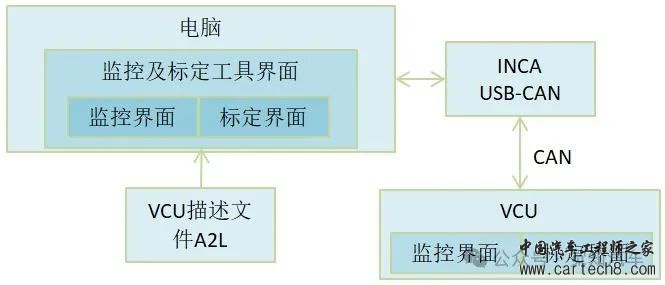 图6 基于CCP协议的标定架构示意 其中标定涉及的部分内容如下示意: 1)传感器标定:主要指VCU所采集的踏板、制动等信号的范围标定,以此确保信号具有足够的精度; 2)开关状态标定:对启动、档位、空调等开关信号的标定,以确保整车系统运行的准确性; 3)执行器标定:如对相关控制继电器的运行状态、指示灯状态的标定,以确保其正确性; 4)信号接收标定:对如动力系统、车机系统的信号进行监控,以确保其接收信息与需求信息具有一致性; 5)工况标定:是车辆运行稳定/可靠的关键,同时也是车辆能源利用率实现高效化的重要途径,此过程需对不同工况下的电机MAP进行逐一标定,在确保整车处于不同动力电池SOC状态下具备安全性的同时,可满足其动力最佳的需求; 6)辅助系统标定:结合动力电池SOC状态,对如空调系统的启动、运行状态进行标定,以实现能量的合理利用,同时标定空调系统的工况状态,以实现座舱能量的最优化利用; 7)充电状态标定:对动力电池及其单体电压的阈值进行标定,以满足车辆充电的指标需求; 8)充电电压保护标定:对动力电池的允许最大充电电压及最低放电电压进行标定,以确保动力电池不出现过充过放现象,进而提升动力电池的使用寿命; 9)充/放电功率标定:根据不同动力电池SOC值,对其可允许的充/放电功率进行标定,以确保其安全性; 10)驱动系统安全标定:如对MCU直流侧的最高/最低电压及相关温度、电流等状态进行标定,以确保驱动系统的运行安全性; 11)热管理系统标定:在分布式架构中,整车热管理的集成度并不高,因此在对此部分进行标定时需按模块进行,如在电驱动热管理部分,需对电机/MCU的温度限值进行标定,在空调座舱部分,需对档位温度进行标定等; 12)其他安全及性能标定。 在新能源汽车中,对VCU软硬件的开发是其相关功能实现的基础,但对其标定过程的精细化不仅关系到车辆的性能表现和安全性,还直接影响到用户的驾驶体验和车辆的能源效率,因此,在一定程度上我们可以说该步骤实施的水平,是确保新能源汽车技术优势和市场竞争力的关键所在,此过程也是VCU产品开发的核心步骤之一。 |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论