聊聊ADAS视觉公司的两种成长模式
朱玉龙 MobileEye走的是开环系统依靠多合作伙伴的发展之路,斯巴鲁和Hitachi的路线是车企&Tier1的闭环。
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
本文主要通过对比MobileEye公司和斯巴鲁视觉系统的发展路线,来谈谈视觉公司的发展之路。前者是开环系统依靠多合作伙伴的发展之路,后者是斯巴鲁和Hitachi的车企&Tier1闭环。  我们可以广义的来看视觉,包括融合(TJA)、前向检测(FCW→AEB)、横向(LDW→LKA)、盲区检测、夜视和驾驶员检测,以后可以加入CMS(防追尾系统)。 第一部分 斯巴鲁 1.1 斯巴鲁的视觉系统历史 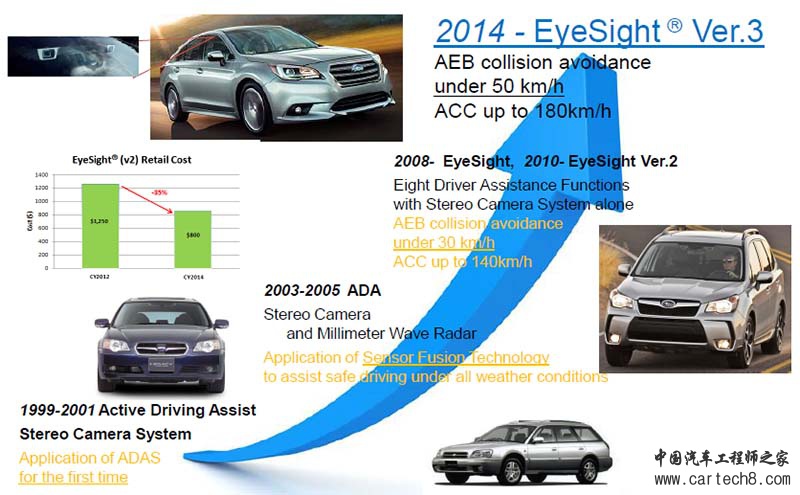 1990年开始开发双目摄像头; 1999年 ADA V1,车间距控制巡航控制 、车间距警报 、车道偏离警示 、弯道警报/减档控制; 2001年 ADA V2,并发售之前的4项功能+ VDC预览控制; 2003年 ADA V3,加入跟随监视 、前车启动监视等;增加毫米波雷达,用来弥补立体摄像头夜间&气候条件的不足; 2008年 Eyesight 1 ,增加FCW功能。一体化的新立体摄像头 ,可以削减成本,提高性能; 2010年 EyeSight 2,FCW功能升级,降低35%的成本; 2014年 EyeSight 3,性能继续提升,ACC和AEB基于双目。 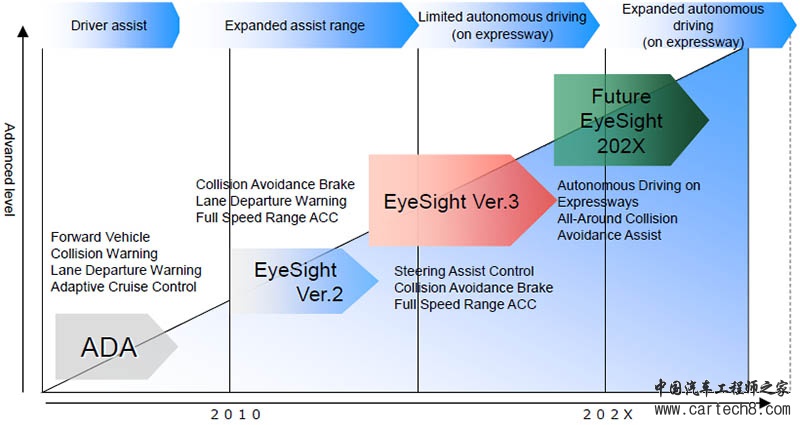 1.2 未来的规划 2017年(计划):在限定的情况下(如高速路),继续延展单车道的功能; 2020年(计划):扩展到其他情况下。 这里的核心,是斯巴鲁的工程师将系统进行集成: ADA分离系统:摄像头+ECU;Eyesight 摄像头集成图像+识别+控制算法和通信;Hitachi与斯巴鲁是联合开发,最后的结果是内容仅限于斯巴鲁和铃木使用;斯巴鲁工程师需要完成算法识别、专利注册;斯巴鲁工程师确定安装,下线校准;Hitachi完成硬件模组+处理芯片。 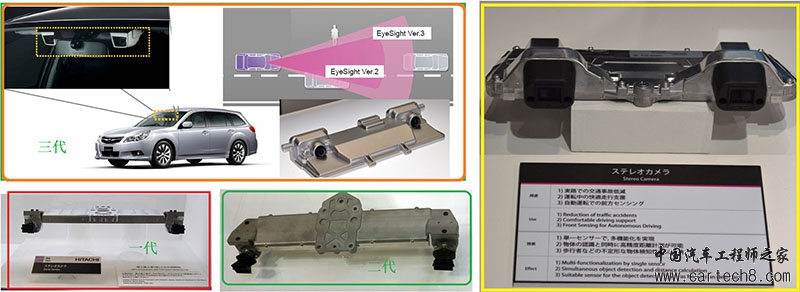 我们其实可以点评下这个技术,这个技术的成本其实不算高,为啥只能用在一定的范围,其实有以下的几个考虑: 在日本产业界,本身比较封闭,技术这块限于斯巴鲁的影响力;车企和Tier1交叉拥有技术,很难推广;合作模式很难扩展。 第二部分 MobileEye公司 我们看看下面这个图,可以获取不少的信息。 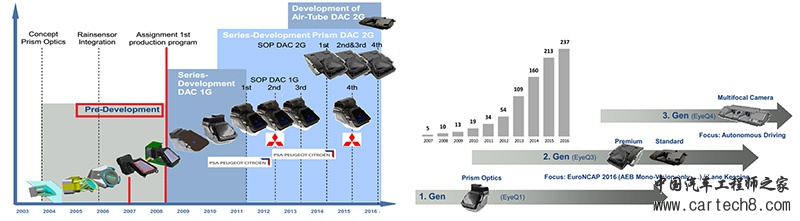 2004年EyeQ1 搞出来,可以实现很多的功能; 2007年被Volvo作为辅助的功能开始使用【测试用】; 2009年进入生产环节。 这条路径上,有着开放的路径可以与大量的Tier1合作,直接与车企的合作和测试行为,使得整个算法被认可程度比较高,并不局限于单一的OEM的使用。  它的积累过程包括: 1. 与各个车企之间连接的CAN协议库:这里是后装的部件,所以相当一部分,应该是通过“合理”破解的。反过来思考,后装就是前装的敲门砖。这些后装的数据库,其实是MobileEye公司工程师测试的蓝本,借此可以通过安装后装部件提前给OEM工程师提供性能蓝本。 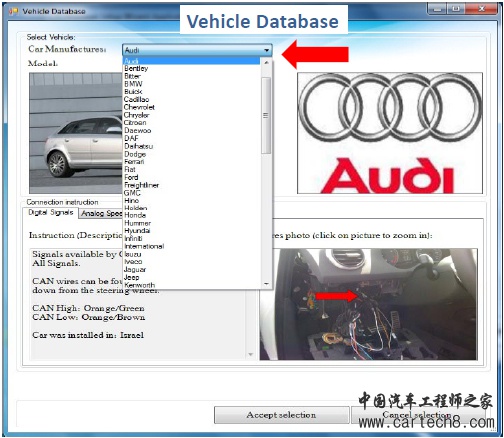 2.驾驶员和道路数据库。需要构建一个庞大的外部测试团队;需要构建一个庞大的数据收集数据库,测试&开发迭代;与Tier1和车企进行合作。 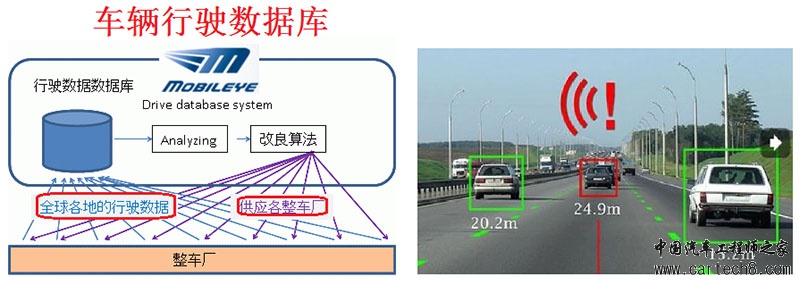 我们再来对比下这两者,其实能有很多有趣的事情发生。比如MobileEye的方案很早与很多Tier1是战略协同的,如ZF TRW公布下一代安全摄像头S-Cam4。  小结 1)下个阶段,随着摄像头越来越多,未必在自动驾驶上面,在整个智能化和数据化的过程中,鹿死谁手不得而知。 2)将视觉纳入汽车中,算法不仅仅是算法,与其说是算法牛,不如是一个道路环境和驾驶行为的开发&测试系统的成功,也需要特定时期的商业模式合适。 3)随着多个后视的推出,车辆看待前后左右的角度有些不同了。  法雷奥的Sightstream,可以替代常规的后视镜 法雷奥的Sightstream,可以替代常规的后视镜 |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论