自动驾驶激光雷达光学系统设计方法
自动驾驶激光雷达光学系统设计方法
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
 机械式扫描的激光雷达,常用的比较多的Risley prism,也有旋转平面反射镜,也有用galvano mirror+DMD扫描模式。这里主要说一下Risley prism 如图1所示, 通过两个棱镜的旋转在目标面上形成想要的扫描轨迹,影响扫描轨迹的因素有很多,比如两个棱镜的顶角,两个棱镜之间的距离,到目标面的距离,棱镜的旋转速度等,分析的时候要找到影响轨迹的一些关键产量,有不少论文分析这方面的,大家可以学习,大家可以参考这两篇:详细的可以看这两篇文献:Applied Optics Vol. 50, Issue 5, pp. 679-686 (2011);Applied Optics,Vol. 57, No. 35 / 10 December 2018。这种机械扫描式的雷达用在车上,还是有很多限制。 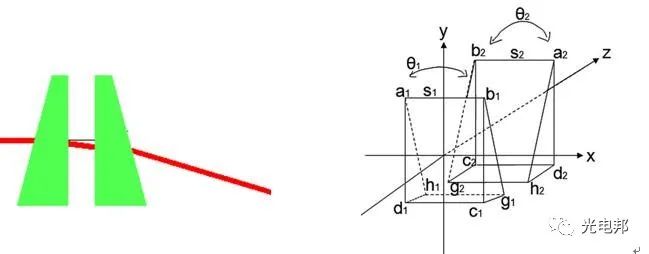 图1 Risley prism MEMS或EWOD prism基的激光雷达虽然也有运动的部件,但是与传统的光学元件相比,体积小,运动速度快,可靠性高,可以看作一种是一种半固态雷达。MEMS或EWOD prism可以实现扫描,但是扫描角度不够,需要一个广角镜头(倒置使用) 来把MEMS或EWOD prism的扫描角度进一步放大,这种传统的球面或者非球面镜头会使系统结构非常复杂如图2所示,另外雷达扫描的区域在水平和竖直方向通常形成的是非对称的区域,这要用旋转对称的球面或非球面肯定不是最优的方案,而自由曲面解决这些问题具有天热的优势。 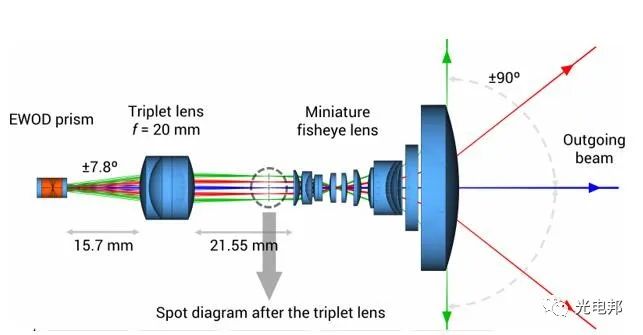 图2 (图片来源:Vol. 27, No. 4 | 18 Feb 2019 | Opt. Express 4408) 360度全景扫描的装置如图3,使用锥形镜,MEMS与水平保持一个固定角度,然后绕竖直轴360度旋转. 这种锥形镜水平和竖直方向的曲率也是不对称的,必然会导致输出光束在一个方向有好的准直性,另一个方向有比较大的发散,难以适应远距离的探测,如何补偿另一个方向的发散,那自由曲面也是很好的选择。详细的内容可以参考:A Compact Omnidirectional Laser Scanner Based on an Electrothermal Tripod Mems Mirror for Lidar Please Leave[C]// 2019 20th International Conference on Solid-State Sensors, Actuators and Microsystems & Eurosensors XXXIII (TRANSDUCERS & EUROSENSORS XXXIII). 2019.  图3 360度全景扫描的装置 相控阵列雷达或光开关阵列如图4,没有移动的部件所以应该是非常有其潜力的一种雷达,这种都是芯片级的所以尺寸比较小。然而这种要实现大的视场角,必然会引起其它性能的下降,比如光束质量,发散角,cross talk 等等。因此相控阵列或光开关阵列,还是需要光学系统来放大扫描角,因为水平和垂直方向扫描角度不一样,因此要设计结构紧凑,形成高光效,非对称的扫描区域,自由曲面就是优选了。  图4 (图片来源:1544 Vol. 7, No. 11 / November 2020 / Optica) 总结: 采用传统的球面与非球面,或者锥形面等构成的雷达光学系统,还是有比较大的制约性,应用自由曲面应该可以减少元件数量,结构变得紧凑,扫描实现非对称性视场,提供在有效扫描区域内光的利用率,在这方面我们已经开展了不少工作,效果还不错,因为专利的原因,过段时间给大家分享几个具体的案例。 |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论