ADAS/AD系统方案-L3级智驾的功能定义(2023年)
ADAS/AD系统方案-L3级智驾的功能定义(2023年)
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
前言:L3级自动驾驶法规终于出台了。一起盘一盘靠谱的L3级智驾的功能如何定义。链接附上:《关于开展智能网联汽车准入和上路通行试点工作的通知》解读_政策解读_中国政府网 (www.gov.cn) 正文先提供一个高速NOA、TJP(单车道脱手)、HWP(允许脱手的NOA)和城区NOA的功能定义,作为讨论的参考。 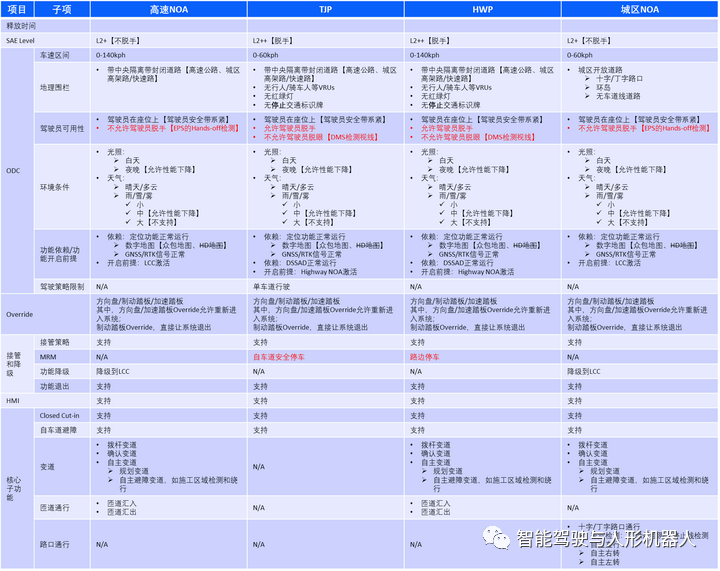 图1 NOA、TJP、HWP的定义区别 由上图可知,高速NOA与城区NOA的区别,主要体现在场景复杂度上和ODD范围的扩张方面,也就是ADAS/AD系统方案02-L2+功能定义变迁方向回顾 - 知乎 (zhihu.com)中强调的场景多样化。 而NOA(不论高速or城区),与TJP、HWP的区别,主要体现在图中红色字体部分,即在驾驶员可用性、MRM上。因此,L2++级自动驾驶,作为一个技术等级,真正向实装功能上映射时,意味着什么呢?
也就是说,在NOA功能基础上,需要做两件事:
但是,由于当前系统性能(系统能力)有限,今年还在攻坚城区NOA这种复杂场景的L2+(不允许脱手)。关联的MRM系统,也需要高性能。所以,只要当前的智驾系统性能不work,要实现L2++(脱手驾驶),甚至L3(脱眼驾驶),不管怎么折腾,都很困难。无法回答“先有鸡、还是先有蛋”的问题。甚至,很多从业人员,认为高阶智驾就等于“有冗余设计”。其实,逻辑上讲不通的。具体讲,如果面向Fail Operational设计的高阶智驾方案中,主系统(Main system)性能不行,经常handle不了某个场景,要退出,要让驾驶员接管。再提供一个性能更加不达标的减配冗余系统,更难以handle智驾场景。再比如,前两年在讨论L3智驾系统设计时,有人提出:“L3级那么高端的系统,万一前视摄像头看不见某个物体,是不是要再加一个摄像头?”。我就纳闷了,第一个摄像头,因为算法性能问题,根本识别不了一辆躺在大马路上的车,你再加一个摄像头,就能识别了?“见到高阶就冗余”的思想,已经成了笑话。 那么,屏幕前的朋友,如果你是高阶智驾产品经理,现在就是要上一个L3级的智能驾驶功能,你会如何“解决”当前智驾系统性能不足的问题呢? 个人能想到的答案就是:做简单场景。让智驾系统更容易handle。当前可以实现的,就是高速的TJP。 自车和周边相关车辆的车速又低,又在封闭高速公路上,没有复杂的道路参与者,是个不错的选择。 奔驰的L3,先从TJP(高速公路拥堵领航,可脱手脱眼)开始,也佐证了该思考。 按照目前行业内的能力(2023年Q4时间段),个人认为面向L3级的TJP问题不大。过认证相对容易。 因此,面向量产的功能设计,可能是类似下面一套功能组合的方式。即,先进入LCC;如果条件允许,进入NOA;如果条件允许,进入TJP状态。超出TJP的ODD,提醒驾驶员重新回到不脱手的高速NOA状态。 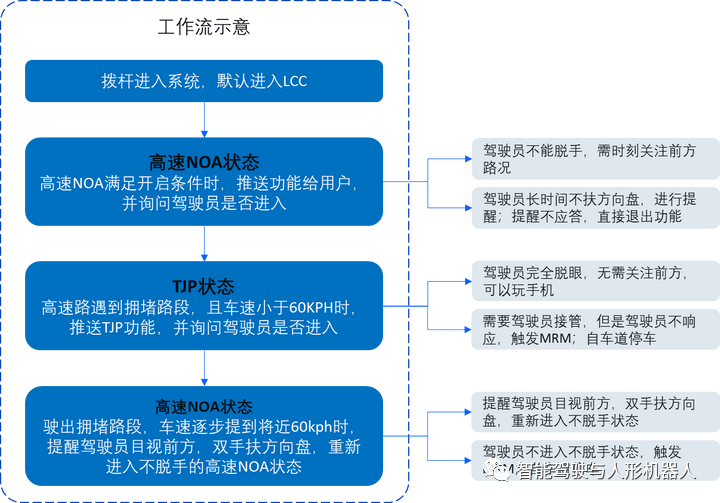 图2 面向2023年行业系统能力的可能的L3级量产功能定义 再做一个层面的假设。假如智能驾驶系统的能力提升到城区NOA(不脱手)可用的状态,反过来,应用到高速上,是不是有可能能做到整个高速路段的脱手脱眼(L3级约等于脱眼驾驶)?那时的高速NOA,就等于是HWP。 一个NOA如果能够支持脱手脱眼,那用户体验一定会再上一个台阶。让智能驾驶真正可用、好用的时代就来临了。 |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论