智车最常见的传感器:雷达、LiDAR和摄像头孰优孰劣?
现在各大车企在智能辅助驾驶方面宣传尤为看种,不少的用户也是从中得知了摄像头、毫米波雷达、激光雷达等名词,但其实际怎么运转,有何作用,又有什么优劣,大家也是一无所知,今天梳理如下:目前汽车中使用的传感器 ...
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
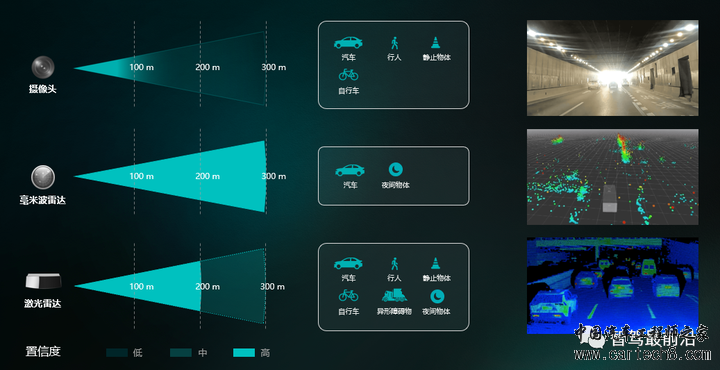
| 现在各大车企在智能辅助驾驶方面宣传尤为看种,不少的用户也是从中得知了摄像头、毫米波雷达、激光雷达等名词,但其实际怎么运转,有何作用,又有什么优劣,大家也是一无所知,今天梳理如下: 目前汽车中使用的传感器主要是雷达、LiDAR和摄像头。它们各有长短,用处不同。这些传感器协同工作,提供外部世界车辆、行人、骑自行车的人、标志等原始数据,其重叠功能会产生冗余(图中颜色重叠部分),确保一个系统出现故障时,另一个系统继续运行。  ADAS完整愿景将融合多种RF技术和立体视觉等传感器,形成一个完整的360°数字处理环境。 01 毫米波雷达是一种使用毫米波段进行测距、探测、跟踪、成像的主动传感器。它可主动发射电磁波,穿透烟尘,几乎不受光线和天气影响,帮助车辆实时感知周围物体并提供较为准确的距离和速度信息。 毫米波雷达里,77GHZ毫米波雷达是智能汽车上必不可少的关键部件,是能够在全天候场景下快速感知0-200米范围内周边环境物体距离、速度、方位角等信息的传感器件。那么它是如何计算被监测目标的位置、速度和方向的呢? 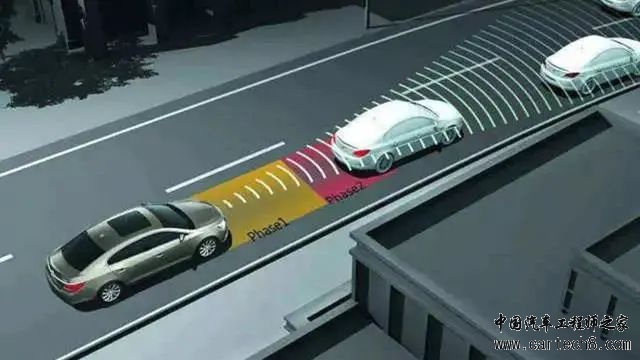 1、位置 毫米波雷达通过发射天线发出相应波段的有指向性的毫米波,当毫米波遇到障碍目标后反射回来,通过接收天线接收反射回来的毫米波。根据毫米波的波段,通过公式计算毫米波在途中飞行的时间&TImes;光速÷2,再结合前车行驶速度和本车的行驶速度因素,就可以知道毫米波雷达(本车)和目标之间的相对距离了,同时也就知道目标的位置。 2、速度 此外,根据多普勒效应,毫米波雷达的频率变化、本车及跟踪目标的相对速度是紧密相关的,根据反射回来的毫米波频率的变化,可以得知前方实时跟踪的障碍物目标和本车相比的相对运动速度。因此,表现出来就是,传感器发出安全距离报警时,若本车继续加速、或前监测目标减速、或前监测目标静止的情况下,毫米波反射回波的频率将会越来越高,反之则频率越来越低。 3、方位角 关于被监测目标的方位角测量问题,毫米雷达的探测原理是:通过毫米波雷达的发射天线发射出毫米波后,遇到被监测物体,反射回来,通过毫米波雷达并列的接收天线,通过收到同一监测目标反射回来的毫米波的相位差,就可以计算出被监测目标的方位角了。原理图如下: 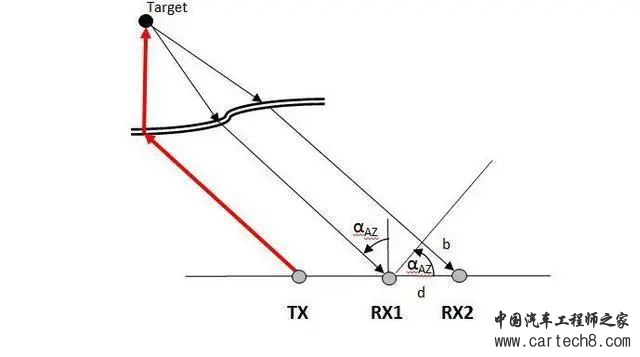 方位角αAZ是通过毫米波雷达接收天线RX1和接收天线RX2之间的几何距离d,以及两根毫米波雷达天线所收到反射回波的相位差b,然后通过三角函数计算得到方位角αAZ的值,这样就可以知道被监测目标的方位角了。 位置、速度和方位角监测是毫米波雷达擅长之处,再结合毫米波雷达较强的抗干扰能力,可以全天候全天时稳定工作,因此毫米波雷达被选为汽车核心传感技术。 但是,毫米波雷达的感知精度并不理想,不具备图像级的成像能力。因为毫米波雷达是利用在目标物体表面的反射、漫反射和散射来进行目标检测和跟踪,所以对于像行人、动物、自行车这一类低反射率的目标,探测准确度也会大打折扣,路面上的静态物体也可能被当成杂波过滤掉了。 另外,4D毫米波雷达其实也是毫米波雷达的一种,并非什么新物种。相比传统 3D 毫米波雷达而言,4D 毫米波多加了一个高度信息,但是分辨率相比激光雷达来说还是有很大差距。 目前市场上的4D 毫米波雷达每帧约输出 1000 多点,而一个 128 线激光雷达每帧输出可达十几万点,二者输出的数据量相差了 2 个数量级之多。 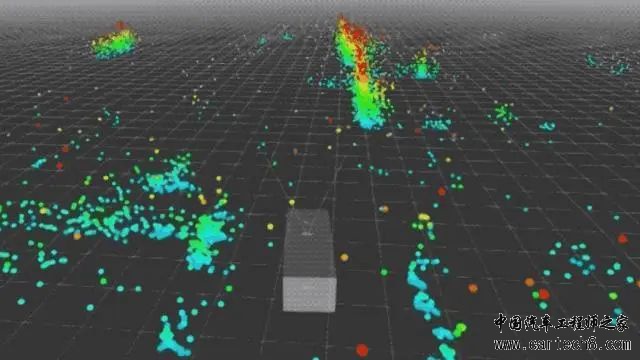 毫米波雷达点云示意 02 激光雷达也是一种主动传感器,最常见的ToF (Time of Flight) 测距法,就是通过主动发射激光光束,并测量他们与周围物体反射往返的时间来确定距离和位置。激光雷达通过向外界发出每秒数百万个激光点,可以获取到这些点的三维定位信息,清晰呈现出行人、斑马线、车辆、树木等物体细节,达到图像级分辨率。而且,激光点越密集,分辨率就越高,越能完整且清晰地重构真实世界。 由于其“主动发光”的特性,激光雷达受周围环境光线变化的影响非常小,在一片漆黑的夜间环境也能够“精准洞察”。此外,激光雷达能够直接获取到物体的体积和距离,不像摄像头要靠“猜”,因此针对小型、异形障碍物的检测,应对近距离加塞、隧道、车库等复杂场景,都会有更好的发挥。不过,激光雷达的性能在大雨、雪、雾等极端天气下也会受到一定程度的影响。 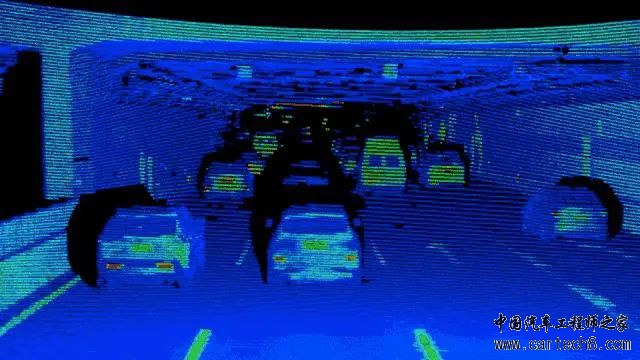 真实点云图 LiDAR是通过多个旋转(物理或通过逻辑)的激光器来实现的,以360度视野扫描车辆周围环境。在自动驾驶发展史上,LiDAR一直是一项重要的传感技术。开创性的自动驾驶原型依靠LiDAR实现了精确的距离测量、可靠性和易用性。 例如,2004年开始的由美国国防部高级研究计划局(DARPA)赞助的自动驾驶挑战赛中,大多数参赛者都依赖LiDAR技术。LiDAR没有辜负人们的期望,优势显而易见,包括:
尽管LiDAR有诸多优点,但也确实有一定的技术局限性:
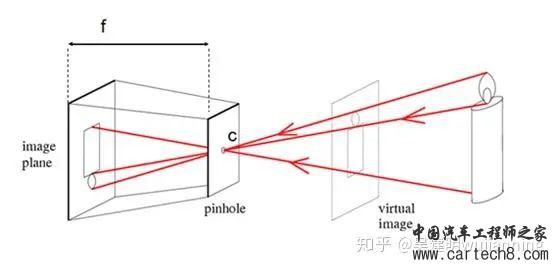
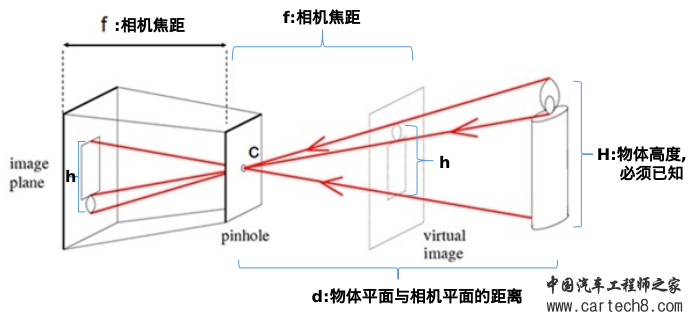
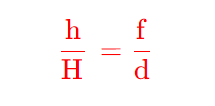
摄像头是最常见的汽车传感器,装在车身四周可以从多角度捕捉环境图像,在90 年代就已开始进入商用并逐渐普及。它也是最接近人眼的传感器,能够获取到丰富的色彩和细节信息,比如车道线,指示标志,红绿灯等等。 
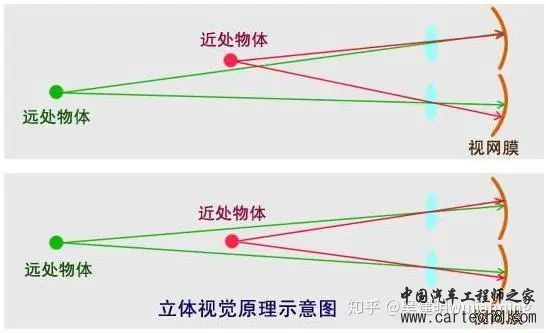
人的眼睛长在头部的前方,两只眼的视野范围重叠,两眼同时看某一物体时,产生的视觉称为双眼视觉。双眼视觉的优点是可以弥补单眼视野中的盲区缺损,扩大视野,并产生立体视觉。也就是说,假如只有一只眼睛,失去立体视觉后,人判断距离的能力将会下降。这也就是单目失明的人不能考取驾照的原因。 |



文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论