从自动驾驶1.0到自动驾驶3.0的思考
从自动驾驶1.0到自动驾驶3.0的思考
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
最近在思考自动驾驶( Autonomous Driving,以下简称AD)的发展趋势,发出来我的观点和大家讨论。 AD 1.0定义每个相机的图像输入给不同的模型来检测障碍物、车道线、交通灯等信息,融合模块使用规则来融合这些信息给规控模块,规控输出控车信号。具体架构如下图: 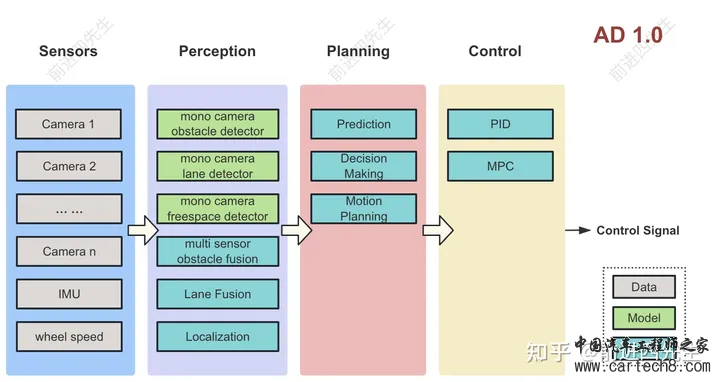 特点
问题
应用案例
总结AD1.0仅支持实现高速场景辅助驾驶,国内新势力也都已经经过了这个阶段。 AD 2.0定义各个相机的输入统一给模型,直接由模型完成不同相机及时序间的信息融合,感知模型同时输出障碍物、占据栅格、车道结构等等。规控模型接收感知输出的feature,输出自车预测轨迹或者控车信号。架构如下图 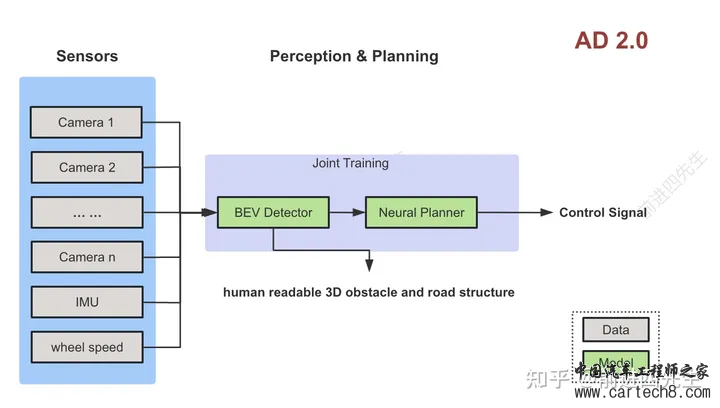 特点
问题
应用案例
总结AD 2.0支持实现城区辅助驾驶,但由于上述问题的存在,依然无法实现无人化。国内新势力在感知端已经完成了AD 2.0的切换,但是规控端还是规则,也可以称之为AD 1.5 AD 3.0定义AD 1.0和AD 2.0的架构已经在业界达成共识,但还是支撑不了真正的无人化驾驶。怎么能通向真正的无人化,目前并无确定的方向。 这里介绍一种可能的方案,把多模态大模型(Multi-modal LLM)作为Agent来控车,架构如下图。 相比AD 2.0的输入只有传感器数据,这里多了人类指令交互,机器可以听从人类指令,调整驾驶行为。 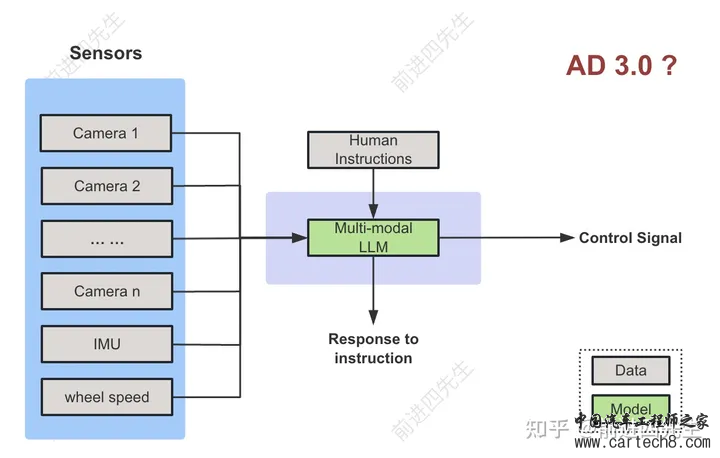 特点
问题
应用案例暂无,硬要说的话可以看看OpenAI投资的自动驾驶公司Ghost Autonomy(Ghost也无法解决上车问题) 总结这种方案上限很高,有望达到人类级别的驾驶水平。但是目前还在学术探索阶段,还需要几年时间才能落地。 在当前这个时间点,也许可以通过把MLLM部署在云端,来监管车辆自动驾驶的行为,并在必要的时候做出修正,类似于L4的远程司机,这种架构称之为AD 2.5? |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论