软件定义汽车研究:如何系统化构建智驾、座舱、车控及跨域 SDV架构?
软件定义汽车研究:如何系统化构建智驾、座舱、车控及跨域 SDV架构?
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
| 如何构建智能驾驶软件汽车(SDV)架构? 自动驾驶智能平台自下而上可大致划分为硬件平台、系统软件(硬件抽象层+OS内核+中间件)、功能软件(库组件+中间件)和应用算法软件(自动驾驶、HMI交互等)等四个部分。  来源:佐思汽研《2023-2024年软件定义汽车:产业全景和策略研究报告》 从自动驾驶各个研发环节来看,主要涉及到软件工程与硬件工程:
智能驾驶操作系统内核主要有两条开发路径
Safety Linux源自Linux,硬件、软件生态都非常丰富;在软件定义汽车时代,Linux在自动驾驶市场的占有率将会逐步上升,成为主导的智驾底层操作系统,国内车企和供应商也将Safety Linux作为智驾操作系统的主要发展方向。  来源:佐思汽研《2023-2024年软件定义汽车:产业全景和策略研究报告》
在上层软件方面,中兴先后和东软睿驰、普华基础软件等中间件企业达成了合作;底层芯片方面,与地平线、黑芝麻智能、芯驰科技等国内主流芯片企业建立了合作。 量产落地方面,早在2021年中兴通讯就向长安汽车交付了基于Safety Linux的智驾OS验证项目,2022年和一汽开启了基于微内核+Safety Linux的智驾OS和车控OS技术验证,2023年又新增了东风Safety Linux智驾OS项目。 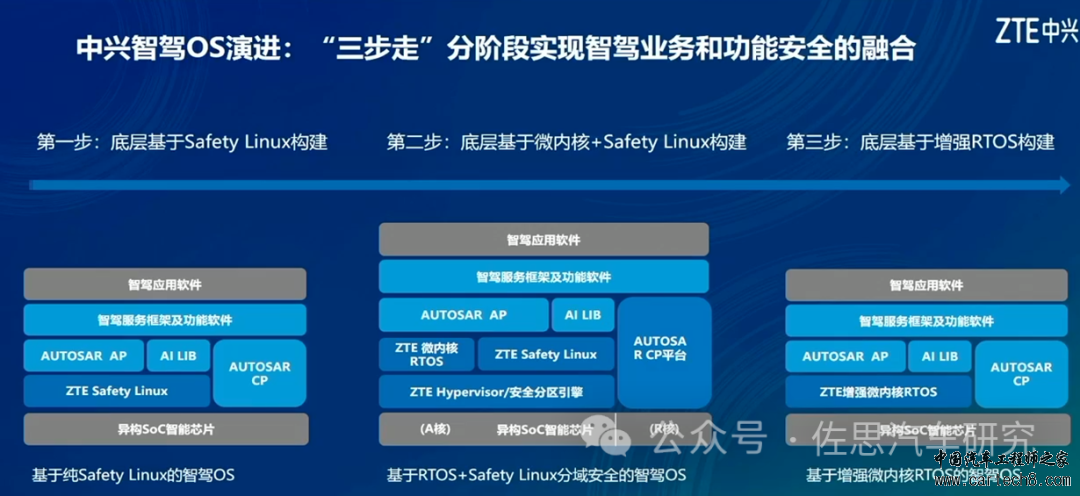 来源:中兴通讯
性能域为AliOS Safety Linux,基于Linux进行实时安全增强,可支撑自动驾驶高性能计算需求。此外,斑马智行自研的AliOS Hypervisor为双核提供了很好的融合机制,同样达到汽车功能安全最高等级“ASIL-D”要求。  来源:斑马智行 智能驾驶操作系统内核,国产化破局关键在于国产芯片和内核OS协同并进 目前,我国汽车保有量已经突破3亿辆,但车载操作系统(含智能座舱系统)自主率大概5-10%;而车控操作系统(含自动驾驶系统)仍处于起步阶段; 除了开发周期长,技术难度大,资金投入大之外,更大的挑战在于QNX、Android等“一家独大”的底层操作系统与芯片等核心技术的“深度绑定”,已经形成一个赢家通吃的生态,比如Android+ARM形成“AA联盟”,两者并非简单组合在一起,而是相互进行深度定制,产生了持续生长的化学反应。 中兴通讯 2023年10月,中兴通讯与黑芝麻智能协同,实现了基于黑芝麻A1000环境的首家国产微内核OS产品对于AI感知及推理全业务流程的支持,在智驾领域构建“国产芯”+“国产软”解决方案; 斑马智行 已与10余家主流芯片厂商建立合作。斑马智行基于AliOS Drive智能驾驶操作系统在地平线征程5芯片上构建计算底座,可以支持更强的AI算法创新; 普华基础软件 响应中国汽车工业协会中国车用操作系统开源计划,与中国一汽、北汽研究总院、吉利汽车、理想汽车、芯驰、地平线等 21 家单位开展开源共建合作。普华基础软件向行业开源“龘”(EasyAda)微内核源代码,芯驰科技智能网关芯片G9X成为首款适配芯片。 国科础石 基于Linux的础光操作系统芯片适配,目前已经支持英伟达Orin、黑芝麻A1000等芯片,紫光展锐、瑞芯微、芯驰等正在适配中, 也计划与更多厂家开展合作,如地平线、飞腾等。上述相关车载芯片支持BSP也会陆续开放源代码。 车企方面,研发能力强的新势力车企将更倾向于构建全自主的智驾 “底层内核+芯片” 体系: 特斯拉 特斯拉基于Linux系统,打造出自有的RTOS(实时系统RT Linux,自家用C语言编写的),并在此基础上打造域控制器,重构汽车电子电气架构,搭载自主研发的FSD SoC; 理想汽车 Li OS基于Linux内核深度定制开发,将搭载理想纯电车型首发,未来还将搭载理想汽车自研的智驾SoC; 蔚来汽车 「整车全域操作系统天枢SkyOS」,基于Linux内核,是蔚来整车底层操作系统,搭载NT3.0平台车型(ET9等),适配NVIDIA、高通、英特尔等芯片平台,此外还将适配搭载蔚来自研智驾SoC "神玑NX9031"。 主机厂和Tier1的内核OS、芯片适配方案  来源:佐思汽研《2023-2024年软件定义汽车:产业全景和策略研究报告》 国产操作系统厂商纷纷推出开源计划 目前,中国正在加速推动汽车OS开源发展: 华为鸿蒙 2021年全部捐献给开放原子开源基金会,形成OpenHarmony开源项目。 斑马智行 2022年宣布AliOS Drive将有效实现分层解耦、跨域共用和开放合作。 普华基础软件 2023年加入中汽协中国车用操作系统开源计划,成员单位包括普华基础软件、一汽、东风、长安、中汽创智、中电科32所、西部智联、地平线、芯驰科技、先进操作系统创新中心、电子科技大学等21家单位。2023年5月,普华基础软件正式发布了中国车用操作系统开源计划中首个微内核开源项目,计划将于2023年底启动POSIX PSE51 OEM预研项目,实现功能验证,并于2024年实现功能安全验证,2025年实现量产验证。 国科础石 2023年2月,国科础石正式对外发布础光操作系统整体规划及开源计划,并将应用在智能汽车座舱域、自动驾驶域的础光Linux进行开源,以此作为国科础石开源计划实施的起点,其他相关企业、机构或者开发者可以基于该开源版本进行汽车操作系统及应用开发。 如何构建智能座舱软件汽车(SDV)架构? 从智能座舱各个研发环节来看,主要涉及到软件工程与硬件工程:
在云原生平台方面,头部主机厂和造车新势力先行,车企开始成立专门的数字化转型部门,加速推动数字化战略落地,从上层驱动企业创新与变革。
 来源:佐思汽研《2023-2024年软件定义汽车:产业全景和策略研究报告》 云原生源于云计算,其构建并部署在云中,能真正访问云基础设施的强大功能。云原生可以在云端和车内侧,汽车系统软件越来越复杂,现在的代码量已达到上亿行,因此在车内侧,也把运行态软件引入容器。 吉利汽车 吉利云原生技术联合了火山引擎团队和在软件定义汽车、智能汽车广义操作系统的先行者东软睿驰团队共同深度研发。目前,吉利自研的数字孪生智能座舱系统云化应用技术,已注册专利30余项,吉利云原生技术可以实现云、边、端互联,让座舱算力与空间硬件解耦,让座舱体验摆脱对车端芯片的算力依赖;  来源:吉利汽车 上汽乘用车 CloudOS 在上汽乘用车量产应用,上汽乘用车基于“云原生技术”,开创“数据同步即功能生效”的车云数据协同架构; 安波福 安波福与风河软件合作开发了“端到端云原生DevOps平台”,在支持软件定义汽车上,Wind River Studio可以分成车内侧和云端两部分,一部分是基于车内侧相应的运行态软件,一部分是云端的Studio工具集。 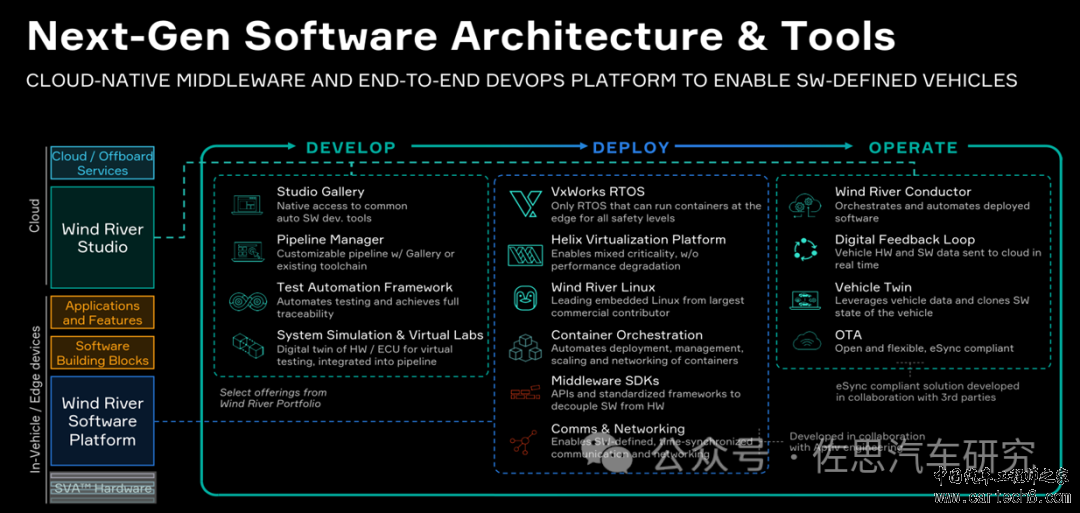 来源:安波福、风河软件 如何构建智能车控软件汽车汽车(SDV)架构? 智能车控具体包括车身控制、底盘控制、动力控制、能量管理等多个细分领域。随着E/E架构进一步向跨域融合、“中央计算+区域”架构演进。 电气架构集中化,进一步整合动力域、底盘域和车身域,提供汽车中间层核心控制功能的集成,其目标是为自动驾驶接入车辆打造整车控制“操作系统”,不同的主机厂或Tier1,根据其产品特性,集成思路有所不同。
路特斯正与不同合作伙伴联合开发VMC整车动态控制软件,主机厂专注于主机厂自身的核心能力,即整车层级差异化开发,聚焦整车部分的差异软件和参数,让供应商专注于平台化零部件开发。 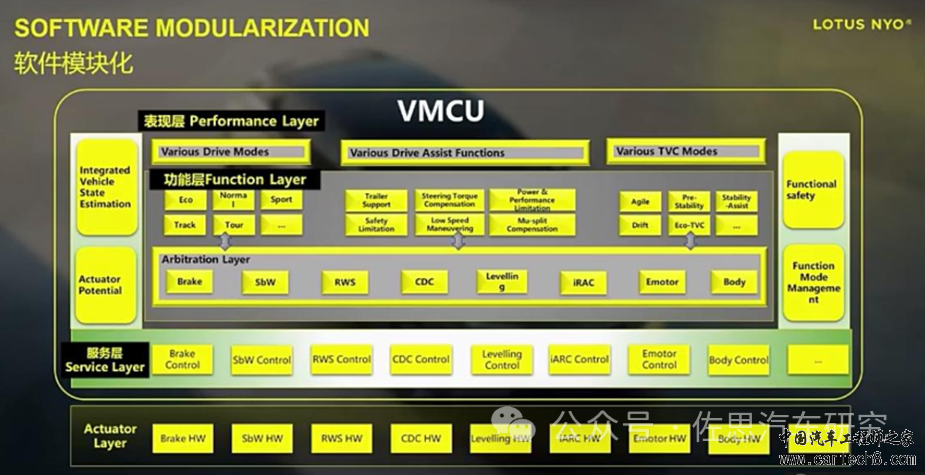 来源:路特斯 从功能域走向中央计算架构,区域融合的理念不可或缺,关键环节就在于区域控制的具体实践。新一代车身区域控制器融入了部分区域控制思想,划分左右控制器,负责本区域内的信号采集及负载驱动,具备五大核心功能:区域供电、区域信息、区域功能(原子服务提供)、区域驱动、边缘计算。
从开发到测试验证全过程,联合汽车电子为开发者打造预安装的本地开发环境,同时提供开发套件(SDK);在USP2.0平台上,可以调用的服务已经深入到了车身控制、能量管理、运动控制、热管理等领域。  来源:佐思汽研《2023-2024年软件定义汽车:产业全景和策略研究报告》
“软件功能即产品(FaaP)”核心在于软硬件解耦,大陆集团中间件(Middleware)可以将上车身和下车身解耦开来,可以看到上车身更多关注的是性能和算力,包括ADAS的算法、车内娱乐的实现等。对于上车身的开发更多的以软件和服务导向;下车身是传统的车身电子,以硬件和产品为导向。 解耦后可以让OEM和tier1与其他供应商共同开发,在同一框架下合作,增加开发的效率,系统模块的可移植性也大大提高了。 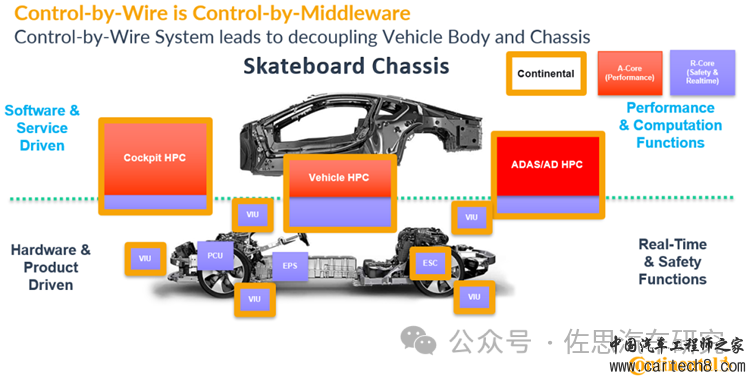 来源:大陆集团 |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论