CAN通讯系列29 - CAN信号背后都经历了什么?
当你看到这些CAN报文在鲜活的跳动时可能没什么感觉,其实每一条报文,甚至每一个信号都生而不易,也许经历了一段非常精彩的故事,有过拉扯,也有过争论,甚至掐过架。下面就来详细讲讲,那就先从整车的网络拓扑开始 ...
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
 当你看到这些CAN报文在鲜活的跳动时可能没什么感觉,其实每一条报文,甚至每一个信号都生而不易,也许经历了一段非常精彩的故事,有过拉扯,也有过争论,甚至掐过架。下面就来详细讲讲,那就先从整车的网络拓扑开始。1 整车的网络拓扑整车的网络拓扑决定了各个控制器的定位以及相互之间的关系,以怎样的方式进行通讯等。比如下图示意域控制器的电子电器架构方案: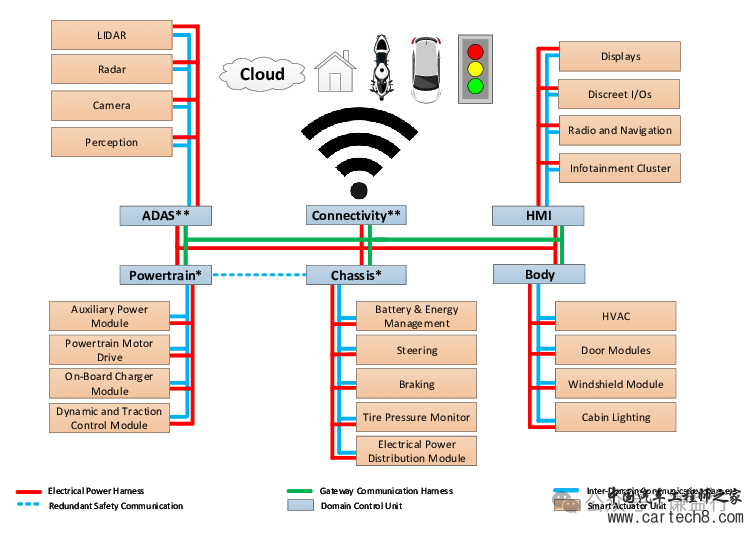 Source: Domain controller E/E architecture example.可以看到有六个域控制器,包括动力总成,底盘总成,车身,高级辅助驾驶,车联网以及大屏仪表等。它们之间是以怎样的形式通讯?每个域控制器下又有相应的子控制器,比如动力总成域控制器下有电机控制器,车载充电机控制器和电池管理系统控制器等。它们之间又是以怎样的形式通讯?这就涉及到所谓的整车网络拓扑,类似于下图: 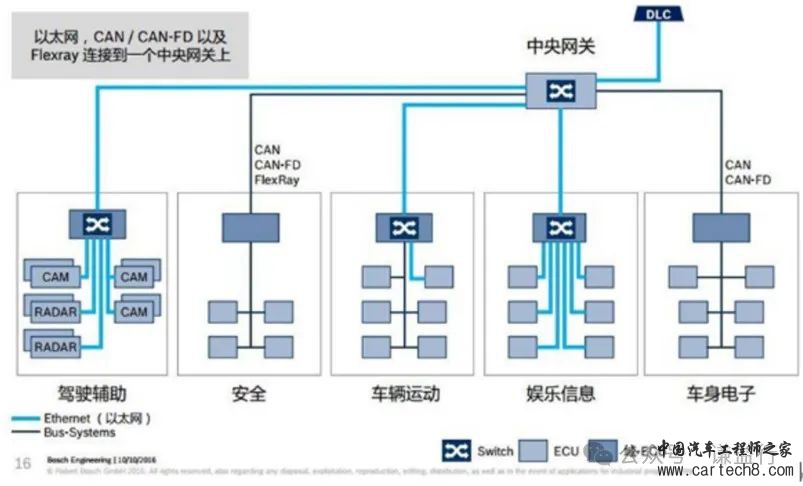 主要采用以太网和CAN/CAN FD等通讯方式来构建整个网络拓扑。本文我们就采用类似这样的域控电子电器架构,域控制器的内外都采用CAN/CAN FD通讯方法,在此基础上,下面就结合整车功能开发了解CAN通讯都有哪些拉扯的地方。2 整车功能实现,以交流充电为例假设我们需要实现交流充电功能,其实现可能需要会涉及:
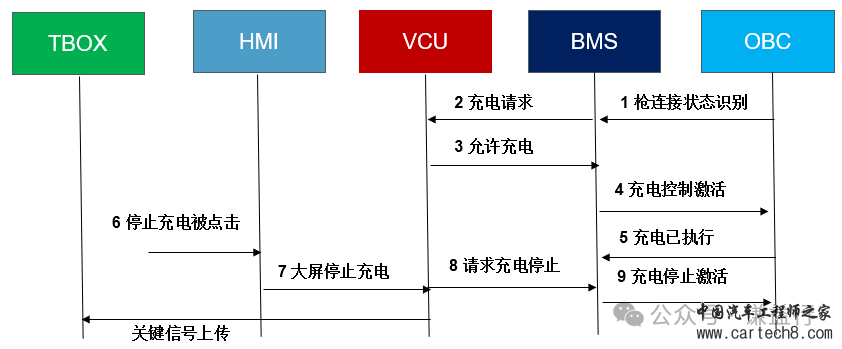 当插上了交流充电枪时,先由OBC来识别枪连接状态;再BMS根据电池的状态判断是否需要充电,如有需求则向VCU发送充电请求;然后VCU根据动力总成系统的状态判断是否可以上高压,允许充电;最后BMS对充电进行控制,OBC具体执行交直流和高低压的转换控制。在充电开始时或者充电进行时,用车人员可能因用车需要而主动操作停止充电,以及在充电过程中有些关键信号可能需要上传都数据平台等。 也就是说,就这么看似简单的充电功能,实际上需要多个控制器有序且精准配合才行实现,这些控制器都采用CAN通讯进行信息交互。那这些CAN信号背后都有怎样的精彩故事?3 CAN信号背后的故事 CAN通讯的实现具体到主机厂的工作内容是非常复杂的,可能信号本身并不是很复杂,但是背后经历的人和事可能非常复杂。 通常CAN信号主要从功能开发工程师(Function Owner, FO)那里因功能需要而发起,最终落地可能需要经历一个复杂且漫长的过程。为什么呢?
以上就是CAN信号产生到最终落地的过程的简单分享。希望下次你看到CAN矩阵会更有感觉一点,不再是一些冷冰冰的信号。这些CAN信号耗费大量的物力人力和精力,这些CAN信号经常是在主机厂各个部门的千锤百炼,相互拉扯,甚至吵得面红耳赤,干架厮杀出来的。想要了解更多CAN信号背后的故事,欢迎去主机厂锤炼一番,以上内容通常与功能开发或者控制器DRE岗位的工作紧密相关。 |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共1条 发表评论发表我的评论