车载导航系统陀螺的自适应校正方法
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
1 前言 自1994年美国国防部发布GPS以来, GPS定位技术广泛应用于民用导航定位领域。近年来,智能车载导航系统发展迅速, 已经形成巨大的市场。 GPS通过接收分布在天空的24颗卫星发送的无线信号计算定位信息,由于无线信号的直线传播特性,当GPS接收机在隧道、树荫或高楼附近时,卫星信号被遮挡,影响准确定位甚至无法定位。陀螺具有可靠性高、动态响应快和完全自治性的优点,被广泛应用于车载GPS/ INS组合导航系统,在GPS信号弱或丢失时,提供定位信息。受成本的限制,车载组合导航系统采用低成本、低精度的压电振动陀螺。该类陀螺的稳定性较差,容易受环境的影响。陀螺的精度直接影响到组合导航系统信息融合的精度,为了提高组合导航系统的性能,国内外进行了大量的研究工作,相关技术已经进入实用阶段。研究主要集中在采用卡尔曼滤波器实时估计陀螺等传感器的误差,然后对融合结果进行修正。对于没有GPS辅助定位的情况(如导航系统冷启动) ,由于温度的变化,先前的校正数据已经不再适用。文献对陀螺的误差校正进行了研究,通过实验测量陀螺的参数,分析了误差影响因素,但没有给出具体的在线实时校正方法。 作者分析了陀螺的误差及其影响因素,建立了陀螺温度- 误差校正表,利用卡尔曼滤波估计陀螺误差,对校正表自适应训练。经过一段时间的学习,经校正表修正的陀螺模型精度得到改善,组合定位和INS单独定位的精度得到提高。 2 压电振动陀螺的误差分析 压电振动陀螺的主要误差有陀螺零漂和标度因子误差,在实际车载工况下,载体在各轴向的振动产生加速度耦合噪声,耦合噪声用随机噪声建模,并作为陀螺零漂噪声的一部分,不单独考虑。零漂是指角速度为零时实际输出与标定零点的误差,误差包括随机噪声和与环境温度有关的漂移2个部分。随机噪声用一阶马尔可夫过程描述:
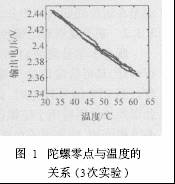
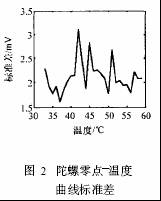
其中N r 为陀螺零漂噪声, Nr 为零漂噪声的一阶导数, Tb 为马尔可夫过程时间常数的倒数, Nb 表示随机白噪声。 陀螺零点温度漂移部分B r 为温度的函数,即B r= f ( t) ,与环境温度呈非线性关系。不同厂家、型号的陀螺温度特性有很大差别,即使是同一型号、同一批次的陀螺,也会呈现较大的个体差异。为了获得准确的陀螺模型,需要对每个陀螺单独进行校正。采用实验室方法校正虽然能够得到准确误差模型参数,但不适合于批量生产,而且陀螺在使用过程中,其特性会发生变化,需要重新修正陀螺参数。 采用富士通公司的S1BG压电振动型陀螺进行温度实验。3 次独立实验结果如图1所示。结果表明,在相同的测试条件下,不同的测试所得到的陀螺零漂- 温度关系曲线存在一定偏差。为验证这一现象是否具有普遍性, 对Murata 的ENV - 05G和AD I的ADXRS401进行了测试,各次独立实验得到的零点温度曲线都存在偏差。通过对同一批次数个样品( S1BG)分别进行8次独立实验,每次测试得到的零点温度曲线均不重合, 1号样品8次测试得到的零点温度曲线的标准差如图2所示,最大标准差为311mV。因此,从实验结果可以认为:陀螺零漂与温度存在确定性关系,建立零点-温度模型可以校正绝大部分零漂误差。
下一页 >> |

文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论