基于汽车发动机控制模块的耐久性测试系统研究
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
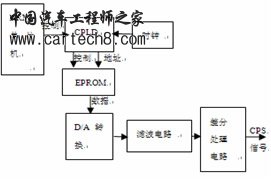
曲轴位置信号(CPS)是PCM控制点火系统中最主要的传感器信号,为适应多种PCM的需求,设计采用CPLD和DA的方式产生。CPS信号产生原理如图5所示,在EPROM中存有一个周期的正弦表数据,当需要产生CPS信号时,ARM单片机对CPLD进行设置,CPLD根据接收的控制命令,通过时钟计数,产生读存储器的信号,并向EPROM提供合适的地址信号和控制信号,EPROM输出相应地址的数据,经D/A转换,变成单端CPS模拟信号,然后经滤波电路和单端转差分处理电路,输出CPS差分信号。在实际的电路实现中,对CPS信号的控制可由计算机通过CAN总线向ARM发出控制命令进行设置,因此,即使ARM芯片在运行过程中复位,电路仍能输出正确的CPS信号,以确保测试周期的正常进行。 该子系统还针对各类PCM模块的需求,设计了两种VREF/2信号的产生方式:电阻分压方式和运算放大器分压;同时,利用555时基电路和滤波放大电路设计了PWM发生器;此外,该子系统还采用电阻分压加集成运放隔离的方式产生PCM需要的小幅值固定电压信号(比如1.0V)。 3.2 模拟负载子系统
图5 CPS信号产生原理图 该子系统主要模拟PCM连接的点火线圈、喷油、碳罐电磁阀、废气再循环等输出负载。该子系统是一个能模拟各种PCM输出负载的开放式负载系统,并可通过现场总线进行系统扩展。 本文综合分析了PCM负载的公共性和特殊性,设计了两种类型的负载板:公共负载板和特殊负载板。模拟负载模块有多块模拟负载板组成,并同负载监测模块一起安插在负载箱里。当需要进行具体项目的测试时,可通过继电器矩阵完成负载的切换工作。此外,还采用了光电隔离方式将PCM输出信号转化为负载监测子系统能接收的+5V TTL信号。 3.3 负载监测子系统 该子系统也是一个基于ARM单片机和CPLD为主要硬件框架的嵌入式计算机系统,并可通过现场总线,进行系统扩展。该子系统通过实时读入模拟负载子系统中监测信号,监测PCM在耐久性测试过程中输出的所有负载信号的变化情况,包括信号的变化周期,部分重要信号输出的时序等,并将监测结果,通过现场总线上传到工控机。
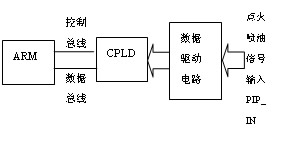
图6 点火、喷油信号监测原理 点火和喷油信号是汽车发动机中的关键信号,其周期和时序直接关系到汽车的运行状态,因此监测它们的周期和时序尤为重要。本系统监测原理图如图6 所示,对于点火信号的监测,主要是监测它与CPS信号的同步,以及两个或四个点火信号之间的时序关系。当CPLD寻找到点火信号与CPS同步的起始点后,根据输入的PIP_IN信号,对各点火信号进行计数。每当一个点火周期完成后,在下一个点火周期向ARM 单片机产生一个中断信号。该中断信号触发ARM 单片机进入中断处理程序,在该中断程序中,ARM单片机读入对各点火信号的计数值,判断点火信号的时序和周期,并设置点火信号正常与否的标志。对于喷油信号的监测,主要是监测它与CPS信号的同步,以及它们之间的时序关系。当PIP_IN信号中四个喷油信号中任何一个信号的下降沿到来时,CPLD都会监测其它三个喷油信号的状态,如果其它三个喷油信号的状态正常,即给出喷油信号正常标志,反之给出喷油信号异常标志。 对于PCM模块中频率变化较低(比如2Hz)的慢速信号,本系统采用RS232的总线读取方式由ARM 监测它们的周期变化。 3.4 现场总线通信子系统 由于整个系统的各个子系统之间需要双向传送大量的数据,因此对系统的通信性提出了很高的要求:一方面要有较高的通信速率;另一方面又要有较灵活的协议转换。由于CAN总线具有突出的可靠性、实时性和灵活性,因而得到了业界的广泛认同和运用[7]。本系统采用以CAN总线为主,兼有K-LINE、 GPIB、RS485、245总线的现场总线通信子系统,并可灵活组成多个通信子网,完成多模块测试的要求。本系统采用两个CAN子网(CAN0、 CAN1),对于每个PCM而言,信号发生模块和负载监测模块、PCM组成一个通信子网CAN 1。工控机通过通信子网CAN0将各个子网连接在一起。 信号发生子系统与工控机的CAN通信:(1)设置信号发生模块,其设置范围主要是CPS类型、启动CPS、启动正弦信号的产生及开关量输入继电器;(2)控制和读取PCM故障代码。信号发生模块是工控机与PCM通信的中转站。当工控机设置PCM或者在运行过程中读取PCM模块的故障信息时,首先通过CAN0向信号发生模块发送指令,信号发生模块接收到该指令后,只将ID更改后通过CAN1发送到PCM模块。同理,信号发生模块接收到PCM返回的 CAN报文后,只将ID更改后通过CAN0发送给工控机。考虑到不同PCM类型的通信接口差异,在信号发生模块和PCM之间还添加了KLIN总线。当要设置PCM或读取PCM的故障代码时,信号发生模块通过CAN0接收指令,转化成KLIN报文后,发送到PCM模块;同理,从PCM返回的KLIN报文,由信号发生板转换成CAN报文后通过CAN0返回到工控机。 1 0 (请您对文章做出评价) |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论