自动驾驶技术研究超过了交通承载能力?
作者:驾仕派 而随着信息技术的高速发展,自动驾驶汽车,或者再进一步,无人驾驶汽车已经在世界各地开始路测,这可以称之为三代了。显然,伴随着技术爆炸……
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
汽车技术的发展和工业革命是一脉相承的。 电子技术的发展大大增强了现代汽车的安全性和便利性,但是本质上和诞生之初的汽车并没有区别,姑且称之为一代汽车。颠覆传统,可以称之为二代汽车的是发动机由燃油发展为电动机,虽然目前在技术上仍有不尽如人意的地方,但是这已经是不可逆转的趋势。而随着信息技术的高速发展,自动驾驶汽车,或者再进一步,无人驾驶汽车已经在世界各地开始路测,这可以称之为三代了。显然,伴随着技术爆炸,二代和三代在同步发展,可以预见,无人驾驶的电动汽车在几十年之内将会迅速得到推广,不再是科幻小说中的虚拟故事。 汽车自动驾驶技术要通过车身摄像头和雷达传感器以及激光测距器将路况信息传输给车载电脑或者大数据中心,并且依靠导航地图进行自动行驶。可以看到,根据信息处理方式自动驾驶将有三个发展方向。 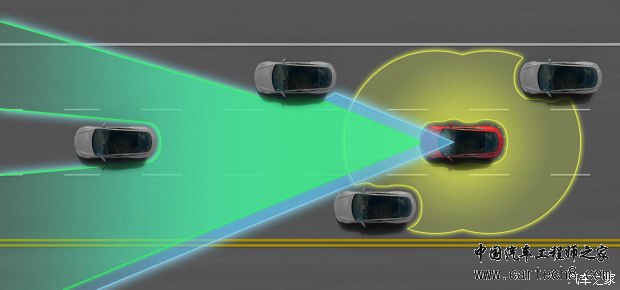 第一种是每台汽车都是一个个体,独立思考,由车载电脑对收集到的信息直接作出处理,这就要求车载电脑智能化程度很高,目前还无法实现。优点是对于信息网络的依存程度较小,网络风险较低,缺点则是一盘散沙,和现在交通状况类似,不利于交通系统的统一调控。 第二种则是将收集到信息都发送到数据控制中心,由信息中心集中处理后再反馈到各基本单元。优点是可以统筹布局,灵活调整各车的行驶路线,缺点则是对于网络的依存程度非常高,一旦网络或总控出现问题,后果不堪设想。 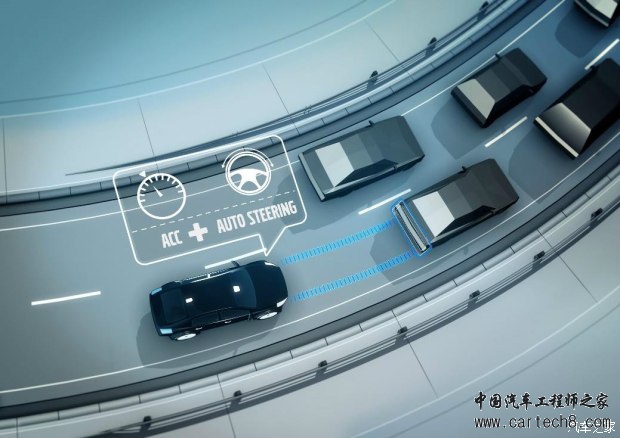 综合前两种的利弊,第三种方式则是行车电脑和数据中心相结合的方式,车辆自主控制行车过程,同时将行车信息反馈到数据中心,接受总控的指令。如果再进一步,则是车辆之间可以直接交换行车信息。比如说,前车探测到路况良好,准备提速或者变道,自动将该信息发射出去,前后左右的车辆接受到该信息时就可以采取跟随或避让的动作,这显然比跟随车辆探测到前车采取加速动作后才做出反应要更先进。而不同厂家的数据系统是否能够兼容互通,直接决定了车辆之间能否采取信息交换动作。 理想状态下的自动驾驶汽车系统应该类似于蜘蛛网的结构,每部汽车都是一个节点,彼此之间可以横向联系,同时又受到数据控制中心的节制。 从目前各家技术发展来看,都是采用第三种发展模式,也是最合理的模式。  最新报道显示沃尔沃S90将标配自动驾驶技术,这套名为“Pilot Assist(飞行员辅助)”的驾驶系统可以实现车辆在时速130公里/小时内在高速公路上沿清晰可辨的车道标识行驶及转向,从报道中我们可以看到,该系统目前仅适用于高速公路这种路况比较简单的行车状态,在我看来,这套系统是在自适应巡航的基础上增加了自动转向功能和车道保持功能,在面对复杂路况时,比如红绿灯、交叉路口、环岛等城市道路路况,这套自动驾驶系统并不适用。如果把自动驾驶看做是一桌大菜的话,S90的这套系统不过是开胃的醋溜白菜,距离满汉全席还差的远。 与沃尔沃不同的是,奔驰公司的自动驾驶技术首先应用在了卡车上,该技术最大程度的接近了无人驾驶。最新报道显示,奔驰公司的三台卡车从德国的斯图加特出发,沿高速公路行驶,终点是荷兰的鹿特丹,全程600余公里。  奔驰公司的自动驾驶卡车高速公路测试相比于其他公司,主要有两个亮点:一是采用了三辆卡车的编队行驶,二是车距保持在15米。大多数自动驾驶车辆不论是选择复杂的城市道路,还是相对简单的高速公路,一般都是采取单车的测试方式,显然,这种多车辆的编队行驶对于技术的要求更高,而且更贴近未来的实际路况。很容易猜测,每一家车厂必然会有一个信息中心对于车辆采集的数据进行处理,同时实现对于车辆的远程控制,毕竟现在的车载电脑还做不到随时合理的处理各种信息,像AlphaGo这样聪明的智能电脑将是未来车载电脑的发展方向。 特别是第二点,在高速公路保持15米的车距,这对于很多普通的驾驶员来说都是非常高的挑战。奔驰能够做到这一点的关键就在于前文曾经提到的,它实现了车与车之间的交流,这是目前普通汽车无法做到的事情。比如说,头车探测到前方路况不佳,需要减速,行车电脑在对本车采取刹车动作的同时,刹车指令通过WIFI也传递到了后车,而后车只需要0.1秒就可对指令做出反应,这样的反应速度也是人类难以实现的。通过以上过程,三辆卡车得以在保持15米车距的同时,高速行驶。 根据常识,高速公路车距越近,也就意味着车速越慢,当车辆间距极小时也就意味着堵车。提高公路的运输效率需要缩小车距,但是车速不能降低,对普通汽车很难实现的目标,对于自动驾驶反而变得容易起来,非常有诱惑力。未来理想状态下的公路运输甚至可以做到类似于火车,每辆卡车之间的距离非常近,将会大大提高公路的运送能力。 从新闻中,我们没有看到车队是否采取其他动作,比如头车和后车交换位置。这样一个简单的动作对于自动驾驶来说,需要后车经过并线,提速超车,再并线的过程,这个行为对于行车电脑还无法做到,需要信息中心远程控制,接到指令的后车同时将超车意图传递给前车。并线超车是现在的自动驾驶可以完成的动作,但是在超车后三辆车能否继续保持15米的间距编队行驶,还是不确定的事情。可以看到,如果自动驾驶车辆能够轻松自如的完成上述变化,距离现实生活也就不远了。  如果我们深入思考的话,可以发现,应用于卡车系统的自动驾驶技术,相比于轿车,更有可能率先被各国政府批准从而得到推广。因为轿车面对的城市路况更复杂,更拥堵,而卡车主要面对的是乡间公路和高速公路,路况要简单的多。特别是在欧美,司机行车更规范,不像国内……咳咳……所以,自动驾驶技术一定是在欧洲或者美国更先被批准实施,国内恐怕要落后若干年。 谈到无人驾驶车辆,谷歌是绕不过去的。对于谷歌的技术原理这里不想多谈,可自行搜索,再多的技术细节谷歌也不会公布出来。  谷歌在信息技术领域的优势使得它在无人驾驶领域保持领先。从谷歌之前公布的路试情况来看,无人驾驶汽车发生交通“事故”的概率要高于普通汽车。这些“事故”绝大多数是由于无人驾驶汽车自身元件出现问题,从而由无人驾驶转为司机控制车辆。对于这一点其实不难理解,越高级的系统越复杂,越复杂的系统越容易出现故障。 因此,影响无人驾驶发展的第一个技术障碍就是自身系统的稳定性,在这个问题没有得到很好的解决之前,无人驾驶还不能大面积推广。 真实发生的碰撞事故并不多,其中只有一起并线引起的意外负有责任,其他状况多是被后车追尾,无责。 这起并线事故是影响无人驾驶发展的第二个技术障碍。 虽然我们自己驾车时也会遇到并线引发的交通事故,但是类似比亚迪撞翻大众的行为毕竟属于个例。侧后方车辆如果不想被前方车辆加塞,司机一般会采取摁喇叭,闪灯光或者提速的动作,这是前方车辆驾驶人可以看到的警示行为,但是对于无人驾驶车辆,这些动作恰恰是各种传感器无法领会的信息,驾驶人可以选择放弃自己的超车行为或者紧急避让,但是无人驾驶汽车做不到这一点。  如果车载电脑能够自己判断后车司机是否接受并线超车的行为,这是不是意味着机器已经具有了感情? 另外一个值得讨论的话题是,为什么谷歌的无人驾驶汽车多次被追尾?从发生追尾的地点我们可以看出一些端倪:事故主要发生在高速公路或红绿灯路口。个人猜测,主要是两个原因,第一,相比于驾驶人时常开小差的大脑,无人车的驾驶更专注,能够随时根据前方出现的意外状况采用应对措施,如果后方的司机恰好在神游四海,被追尾就是大概率事件了。第二个原因是自动驾驶车辆做出应急反应所需要的时间更短,有数据表明,快了1.3秒。比如,前方路口突然由绿灯变黄灯或红灯,由于后方司机比无人车的反应慢了1.3秒,因此需要更长的刹车距离,但是前方的无人车已经刹停,追尾自然也就不可避免。 可以看到,这两点恰恰是无人驾驶汽车相比于驾驶人的优势所在,正所谓有利就有弊,当周围都是普通轿车时,无人车的优点反而变成了引发追尾的导火索。  从奔驰和谷歌的路试车可以看出,传感器采集数据存在缺陷,行车电脑还不够智能,远程控制并不能处理应急状况都是目前自动驾驶汽车在技术上需要突破的方向。至于沃尔沃S90标配的自动驾驶功能虽然只是辅助驾驶功能,但是已经给未来的自动驾驶砌了第一块砖。 另外我还有一个疑问,如果自动驾驶汽车实现了技术突破,可以大规模推广时,蛛网上的那只蜘蛛由谁来做?车厂?还是交通管理部门?毕竟,目前数据中心掌握在车厂的手中。 |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共2条 发表评论发表我的评论