自动驾驶的有图和无图,到底图什么?
自动驾驶的有图和无图,到底图什么?
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
自动驾驶的无图化成为行业竞争的新热点,这也意味着自动驾驶从功能的堆叠进入商品化验证的阶段,无论是去高精度地图还是去激光雷达传感器,本质上都是自动驾驶作为技术应用产品,从功能到系统层面的优化。自动驾驶行业的系统优化风暴逐渐从demo阶段走向实际量产阶段,似乎只有无图、无激光雷达的自动驾驶系统才能凸显企业技术实力和系统的成本优势,在自动驾驶系统中使用高精度地图或者激光雷达信息意味着技术的落后和成本的高昂,这样就出现曾经自动驾驶相关企业纷纷布局的高精度地图或者激光雷达,一时间成为自动驾驶系统优化的众矢之的。 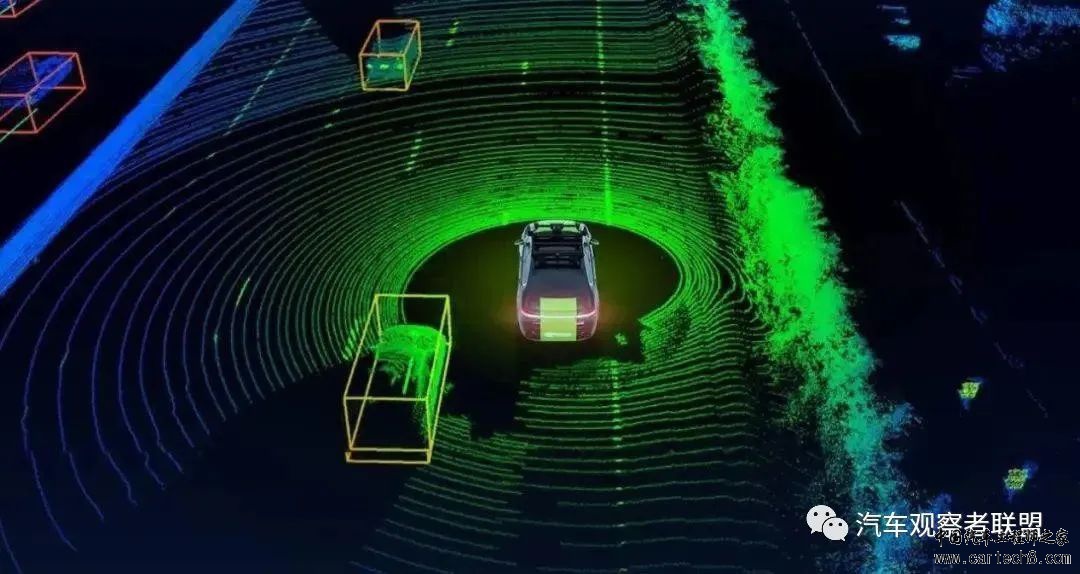 诚然,现阶段高精度地图在自动驾驶领域的推广应用存在一定的弊端,例如,数据更新慢、制作成本高、审核政策等等。然而,针对无激光雷达这个方案比较好理解,因为激光雷达是一个固定的硬件传感器,而去图的方式却是五花八门,每个自动驾驶厂商都宣称推出针对去图的自动驾驶方案,而效果却是千差万别,究其原因主要有两点:第一点是高精度地图自身的复杂性。高精度地图在自动驾驶系统中是一个比较复杂的输入信号,可以当做是硬件部分也可以看做是系统输入数据的一部分,涉及到感知、定位、决策等模块。 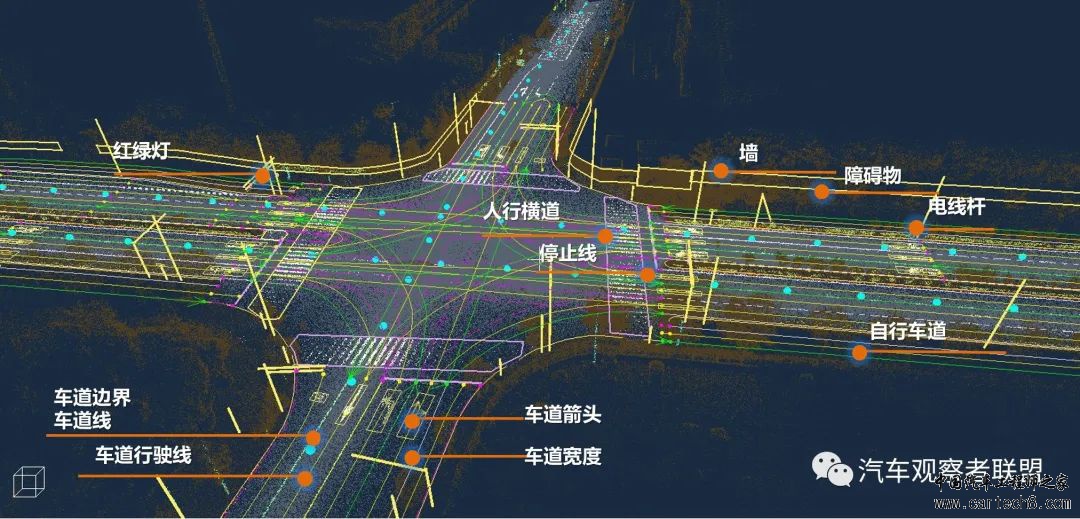 一般意义上来讲,以时间维度高精度地图可以分为两层,底层的静态地图和上层的动态地图,其中静态地图包括道路网、车道网、车道线、交通标志等相对固定的信息,动态地图是一些可能实时变动的交通信息,例如交通拥堵、施工、交通事故等等,为自动驾驶车辆提供实时动态路径规划和信息冗余。从数据维度来看,基于感知控制的逻辑,以高精度地图为核心建立车辆行驶的虚拟环境,并且将行车规划转化为车辆动力学控制。这其中高精度地图包含的数据主要有七层,从底层的道路级路网数据、宏观动态数据、车道级路网数据、车道级路侧数据、虚拟定位的高精度3D数据、动态障碍物的实施环境数据和最上层的驾驶员数据; 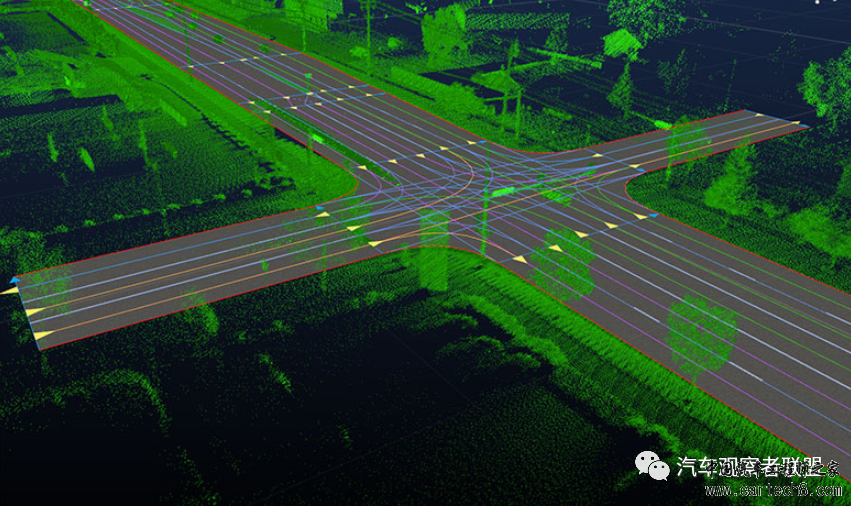 第二点是中文的魅力体现。高精度是一个相对的概念,而不是物理或者数学层面对物理世界的定义,正如物理领域的误差的概念一样,错误是可以避免的而误差永远是存在的,所谓的高精度地图中的高精度一般对比的是普通的电子导航地图,也是人为的定义地图数据要素形成行业的普遍共识,地图中的数据为人或者系统提供先验的信息,所以注定是会有一定的延迟。这个延迟也可以理解为对物理世界感知的误差,所以无论是图商提供的地图还是车企或者自动驾驶公司实时感知的物理环境,误差也是存在的,只是用其他技术来缩小误差的范围。 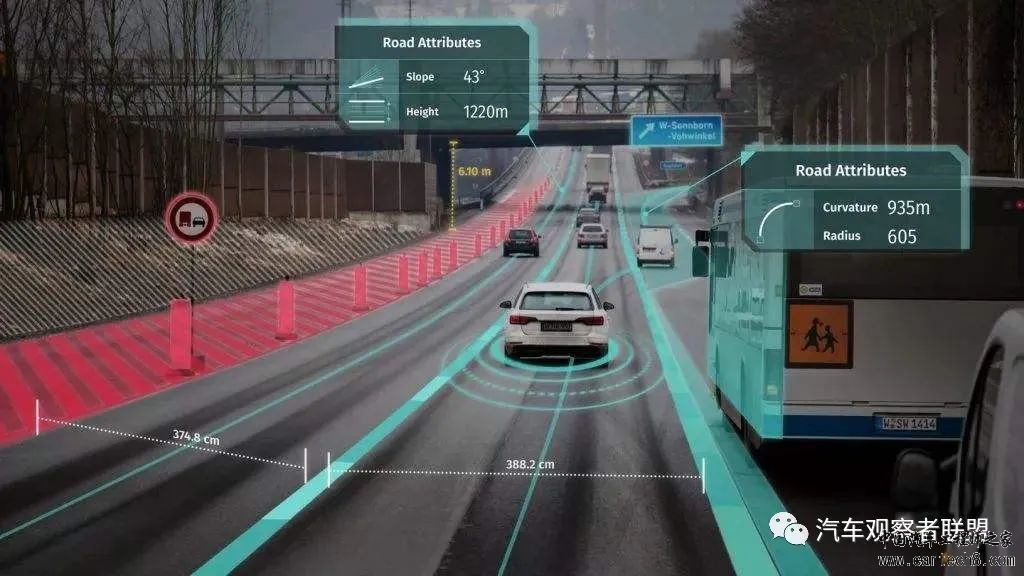 现阶段面对复杂的高精度地图,所有的无地图方案、轻地图方案宣传的口径自然不一,这也就演化出两个问题,一是到底多轻才算轻地图方案,二是去地图的去多少地图信息数据还是完全没有使用先验信息。反过来,自动驾驶厂商开始重新定义高精度地图、定义系统所需的地图信息,高精度地图变成了高度定制的产品,逐渐弱化高精度地图在整个自动驾驶系统中的信息输入,这个弱化不仅仅体现在功能方面,还体现了市场营销方面。含图量的方式主要分为两层来看,第一层是地图应用端。高精度地图信息和车端感知信息的平衡关系的重建。例如,8月14日,小鹏汽车宣布,预计到2023年年底,将会有 50 座城市实现 XNGP 的落地。同时,XNGP 的无图区域能力也正在开发中。XNGP的无图是指在不再有确定信息输入和预验证过程并有环境干扰状态下,完全依靠车辆自身感知元器件、实时感知能力来实现辅助驾驶功能。所以在XNGP系统中,高精度地图的作用是作为一个确定信息的输入源,主要是为自动驾驶系统提供信息预验证的作用,比较典型的场景就是路口或者匝道。  无图方案是通过车端传感器实现动态和静态的环境信息输入,用车端的算法和算力平衡高精度地图信息;第二次层更细一点看目前无图算法方案主要可以分为1.0和2.0两大类方案,1.0是轻地图+重感知方案,通过地图数据要素的定制化弱化高精度地图的名称,既可以实现地图的数据输入还能有效的通过地图审核,也就是说不需要高精度地图也能实现高精度地图的效果。无图方案比较好理解,只需要普通的地图提供传统道路网数据,通过车辆自身的感知系统实现建图。例如Momenta和智己汽车联合发布的无图智驾算法方案,主要分为建图和定位两部分,建图是通过道路中的车道线等静态约束识别和构建车辆实时行驶地图,定位是通过采集车辆横纵向执行器数据以及IMU、轮速、电机转速等信号数据融合实现车辆的实时定位,有了车辆的实时定位信息,再结合其他交通参与者信息,下游的规控算法进行车辆行驶的路径规划。 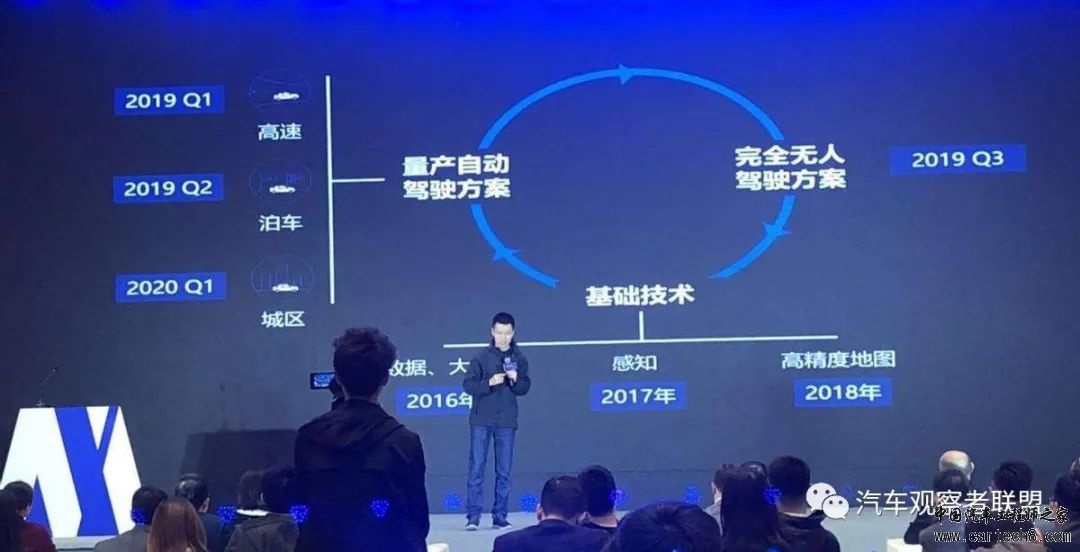 2.0无图方案典型的就是特斯拉的一体化Occupancy算法,其是将三维世界划分为一个个的网格单元,然后定义哪个单元被占用,哪个单元是空闲。根据特斯拉AI DAY发布的内容,简单的理解是首先通过特斯拉的8个摄像头拍摄到的8个画面,然后画面被发送到由Regnet和BiFPN组成的主干网络;其次注意力模块采用位置图像编码并使用QKV矩阵来计算注意力机制,经过注意力机制后,会产生一个占用体积特征,然后模型会将其之前时间的体积特征融合,以获得4D 占用特征网络;最后生成 3D 体积后,使用 NeRF将输出与经过训练的 3D 重建场景进行比较。相比1.0的方案,2.0的方案可以通过数字代码的方式进一步准确的描述物理世界。  相比于自动驾驶厂商对激光雷达和高精度地图的去除态度,激光雷达和地图行业反而一直在活跃,激光雷达厂商禾赛科技登录纳斯达克、北京高精度地图政策调整,扩展示范区域、四维图新通过全国120个城市高级辅助驾驶地图审核、广汽集团出资4000万设立合伙企业,布局高精度地图产业等等信息,这系列的变化充分说明几个问题:首先是去图或去激光雷达只是一个技术探索的方向,而当下的自动驾驶产品仍然是需要地图或者激光雷达,至于能持续多久是一个未知解;  其次是从技术的角度看,通过技术手段提高生产效率是发展的核心驱动力,从商品的角度看,从技术到商品需要有两个大前提,一个是技术应用的价值空间,辅助驾驶或高级辅助驾驶的功能已经证明了在汽车智能化领域的价值;另一个是技术应用的可行性,特斯拉的纯视觉方案或者一体化算法已经可以实现辅助驾驶甚至达到高级辅助驾驶,所以在辅助驾驶或者高级辅助驾驶领域,去图或者去激光雷达的是具有一定的可行性。在辅助驾驶或高级辅助驾驶层面,地图技术或者激光雷达技术在自动驾驶系统中的价值和可行性空间是一个固定值,可以在整个系统中通过其他的技术手段将地图和激光雷达的技术转移到系统能力;  最后是自动驾驶行业中车企、自动驾驶系统商和图商、激光雷达厂商之间的商业博弈。所谓的无图自动驾驶方案,地图能力体现在车端的感知能力之中,从本质上来说地图信息是空间信息的图形传递形式,也是人类认识客观世界的模型之一,所以无论是有没有用图商的高精度地图,自动驾驶系统中都是需要地图模型。  高精度地图一直伴随着自动驾驶技术的发展,同样自动驾驶的发展也会影响高精度地图甚至是地图行业的进化。近十年以来,自动驾驶行业发展中充满了雄心和失落,热血和落幕,与此同时自动驾驶也为汽车和计算机行业带来新的探索方向。在自动驾驶行业起伏之中,不得不提谷歌,得益于谷歌收购了人工智能顶级专家辛顿团队,谷歌独占了第三次人工智能潮流的鳌头。从人工智能到自动驾驶技术,谷歌成为较早的入局者。众所周知,谷歌也是一家数据和地图公司,试图依靠这两个优势资源打通自动驾驶的产业化,所以在自动驾驶产业化的起始阶段,高精度地图和GPS定位成为自动驾驶系统标准配置,这一架构一直影响着自动驾驶的技术发展。  2014年高德地图搭建了国内第一条高精度地图生产线,2018通用汽车的凯迪拉克CT6进入中国,CT6的高配车型搭载了Super Cruise超级辅助驾驶系统,中国首次通过高精度地图审图。可以说,地图行业影响了自动驾驶技术的发展。现阶段,以产品化为导向的自动驾驶技术要求,无形中已经将自动驾驶的功能范围进行了界定,主要分为辅助驾驶和高级辅助驾驶,也就是说在自动驾驶的产品形态不再是天马行空的想象,而是真实可见的产品。在有限的范围内就要求降低产品的成本,从而推广技术应用。这也就解释了,无论是小鹏的无图化的XNGP还是自动驾驶创业公司形式多样的无图方案都有一个共同的特点,那就是对自动驾驶功能的实现进行无图化替代,这样必将出现一个问题,含有高精度地图的系统和无图的系统之间性能的比较,高精度地图成本和无图算法开发的成本之间的对比。高精度地图行业也会根据自动驾驶技术的发展调整行业的玩法,最终还是需要以自动驾驶系统的性能为判断依据,以自动驾驶产品的商品性为参考,而不是单纯的以技术角度“炫技”,为了无图而去图。自动驾驶系统在去图化、去激光雷达化,反过来地图行业、激光雷达行业也会进化出新的商业模式参与到智能化的变革之中,行业不会消失,只会进化成另外的形式存在。 |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论