介绍一下智驾系统的另一个创新领域--电子外后视镜
随着已经越来越激烈的智能化竞争升级,依靠单一功能实现客户青睐的场景几乎已经完全不存在了。从越来越集中式的电子电气架构角度来看, ...
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
当前,随着已经越来越激烈的智能化竞争升级,依靠单一功能实现客户青睐的场景几乎已经完全不存在了。从越来越集中式的电子电气架构角度来看,从域控大规模落地到行泊一体再到逐渐过度的舱驾一体的大域控发展趋势来看,未来的思路将是集成与融合的更多的智能化传感器进行统一处理和应用分析。 实际上,主机厂对于智舱/智驾方案表现出非常多元化的需求,很多情况是需要通过在智能汽车的矩阵式发展形式,寻求面向智驾系统和舱驾一体的全方位融合。因此,如何匹配智驾系统和智能座舱系统的深度融合,如何进一步提升智能驾驶系统功能体验,通过降本增效实现差异化的功能体验也将成为下一个竞争方向。  当前各智能座舱领域的Sensor和ECU均已经向智能驾驶系统级高阶域控的集中式开发方式发展。比如之前由座舱域控单独实现的独立功能DMS、CMS、HUD、活体检测、手势交互等座舱域功能通过硬件复用、大算力芯片嵌入软件模块,来实现最佳的系统集成和成本控制,从而进一步集成至智驾系统中央域控制器。 当然,为了更好的适配多元化方案与开发需求,将座舱域的Sensor或ECU完全整合到智驾系统应用中还不是很成熟,主要体现在硬件集成、系统融合方面还存在较大的门槛。从当前的角度讲,我们所期待的这些智能座舱域功能还是更多的希望能够在满足基本性能的前提下实现实现软硬件解耦。 本文将针对其中一种新型智能座舱传感器CMS(camera monitor system)电子外后视镜如何从智能座舱域的传统应用中发挥作用进行介绍。同时,CMS作为一种新型的摄像头和显示器的产品组合来替代传统的外后视镜,能否较好的应用在智能驾驶系统(比如作为侧后视探测系统)中也是本文重点关注的内容。 CMS到底有什么用? 中国2020年6月发布征询意见稿(GB15084-2022《机动车辆 间接视野装置 性能和安装要求》),GB15084-2022 将在2023/07/01 开始实施,而整个2023也将是国内乘用车市场CMS的量产启动元年。电子后视镜的正式获准上车搭载意味着,电子外后视镜(CMS)前装量产正式开启。2024年也将成为CMS 爆发到市场应用的年份。2025年,CMS产品装机比例和整体出货量也将大幅度提升,届时CMS的产品功能也将更加完备。 电子后视镜系统实际是主要由摄像头、显示屏、控制器构成,使用定制摄像头和后视镜集成视频显示器来优化车辆的后视图。其特性主要有如下几个: 1)通过大视场角的摄像感头传器成像,可以有效增加后部显示范围,并可避免反射玻璃镜面由于曲面效应导致的边缘形变;  电子外后视镜可以为驾驶员提供更广阔的视野,但是需要进行研究来确认提供比要求更宽的视野不会导致眼睛离开前方道路的时间增加,或者对图像质量和可用性带来挑战。 2)作为一种特殊的智能后视系统,CMS还可以实现通过全显示后视镜来改善驾驶员视野并消除盲点;通过摄像头的HDR功能、特殊的图像处理算法,为驾驶员在夜间、雨雾等恶劣天气提供更清晰、更广阔的车外后视野。如下图显示了夜间、雨雾测试场景下的对比分析图。  夜晚雨天车辆测试对比:CMS VS 传统后视镜  夜晚道路灯测试对比:CMS VS 传统后视镜 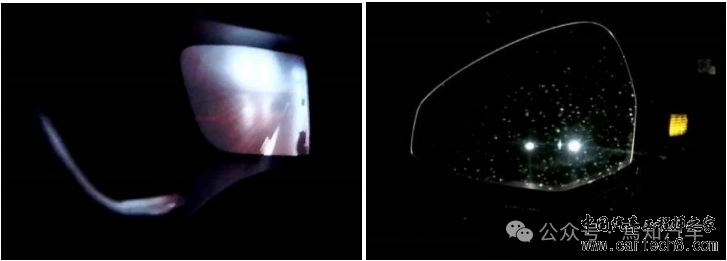 夜晚车辆测试对比:CMS VS 传统后视镜  晴天测试条件下的可动儿童人体模型,CMS 显示中的眩光/反射 实际开发过程中,通过开拓视野、消除盲点、引入防眩光系统和提高夜视能力,CMS系统让每个人的道路变得更加安全。 2)该系统从后置摄像头捕获视频并将其传输至独特的镜面集成 LCD 显示屏,为驾驶员提供车辆后方一览无余的全景。  通过电子视觉显示器呈现的任何侧视图像都应具有良好的图像质量。最大限度地减少图像失真对于为驾驶员提供有用的可视性非常重要。过去的研究发现图像模糊是夜间驾驶时的一个问题,尚未制定评估图像模糊和其他显示像差并确保图像质量足以支持安全驾驶的性能要求和测试程序。 3)后视镜使后视视野加倍,并提供双模式功能,使驾驶员能够在镜像模式和显示模式之间切换系统故障安全。  4)CMS产品在转向、倒车、高速行驶等模式下,可根据车辆转向或倒车信息自动调节并增大后方水平和垂直可视角度可视范围,大大提升行车安全。比如,研究的CMS增值功能包括替代侧后视镜实现侧后方的环境目标探测,但实际上要实现这样的感知特性还是有许多需要解决的问题,比如传感器布置、感知视频帧率、ISP处理能力等。 总结起来,全数字摄像头监控系统更进一步,用摄像头盒取代了车辆的外后视镜,将视频传输到车辆内部客舱内定制的曲面 OLED 显示屏。通过用摄像头取代外后视镜,驾驶员可以获得更大的视野,并具有改善车辆空气动力学、降低风噪声和缩小车辆宽度的额外好处。
– 提供车辆侧面和后部的无障碍视野。
– 如果数字视图中断,则可以使用镜像视图。
– 较小的外后视镜可减轻重量、改善空气动力学并提高燃油/电池效率。
– 旨在满足汽车制造商、驾驶员、安全和监管要求的综合系统。
– 无需重新调整车辆内部以容纳额外的显示器。
– 系统可以与侧盲区警报和集成其他ADAS 功能。 摄像头将非常低延迟的图像传输到车内的两个OLED 触摸屏。高动态范围图像传感器保证在任何天气或照明条件下的完美图像质量。此外,驾驶员可以通过屏幕手动调整摄像头。 CMS的大规模应用还存在那些亟待解决的问题 综合来看,当前已有相当多的影像显示类产品(如AVM、EDR、后视流媒体等)在智能座舱、ADAS等领域实现了大规模量产。也就意味着CMS产品这方面的技术无论是在前端摄像头视频输入、中间端简单的ISP处理,后端显示屏等方面,行业内的软硬件供应商都具备了成熟的技术基础,这也为CMS的实际应用奠定了基础。 基于如上所述的CMS如此多的好处,是不是就可以认为CMS的应用势在必行了。实际上,要真正应用好CMS还有很多需要解决的问题。 画面质感 然而,考虑到视频输出在系统启动时间、画面延迟性、亮度和帧率的要求,主机显示端需要快速适应不同场景的视频处理能力,包括视频编码、出流带宽、画面随动、自动亮度调节、强光抑制&闪烁抑制、图像增强、ISP除雾等多项性能要求。只有满足如上性能要求的CMS产品才可以根据环境快速适应挑战,在强光及抖动、黑夜、大雾等恶劣环境均能实现优异的显示效果。 处理芯片 除了涉及到以上提到的CMS硬件本身关于成像画面质量以及方案选择外,还需要重点提升软件处理技术环节ISP处理能力。如果考虑最终实现集成式大域控的技术方案来说,通常中央域控制器中,会涵盖SOC和MCU两种芯片类型,而进行ISP处理的通常是SOC上的算力资源和算法布局。当前主流SOC方案中,通常ISP针对每个流程都是独立设计,对于这类通用性较强的SoC来说,很难做针对性的设计和优化。 合规性要求 要实现真正的CMS大规模前端量产装车,合规性是基础要求。同时,要有效的应用在智驾系统领域,还需要充分考虑日常真实的驾驶场景中存在的种种痛点,满足各类极限环境下的性能可靠。比如为了满足智驾系统的功能安全要求,CMS产品量产前需要经过复杂且严苛的功能安全及相关性能测试。这些测试包括实现在当前智能汽车快速进化的前提下所需要的感知功能反馈与视频输出的全方位融合。比如,智能驾驶系统要求感知系统在雨雾等恶劣天气下,传感器仍然能够满足一定的探测鲁棒性。这就要求感知软件算法可以通过增加可用的硬件条件实现类似除雾功能提升能见度,同时,通过一定的优化软件算法实现可靠的环境信息探测。此外,还需要在特定用车场景下针对某一区域进行视野扩大,以便感知后端处理模块可以重点处理等等。 开发难度 实际上,CMS作为未经过大规模量产验证的新兴产品,还存在车规要求高、技术与开发难度大,功能安全要求高、成本高等量产门槛。比如仅技术方面,系统的启动时间、画面延迟、画质感受、视野增大、防眩晕等方面需要达到非常优异的水平。尤其是在恶劣环境下的画质问题、画面稳定流畅的视觉效果,不仅事关用户体验,更关乎行车安全。 标定问题 CMS作为摄像头来说,为了考虑其成像效果及真实性,同时适配到ADAS系统功能应用中,就需要对其中的摄像头进行有效的标定,找到其相机内外参数。这一过程看起来和侧后视摄像头是一致的,实际上却相对较为复杂,因为考虑的输出环境影像的效果、可视范围、相机自身内参、相对固定的安装位置等因,标定过程中寻找外参的误差范围上也与侧视会有一些差距。 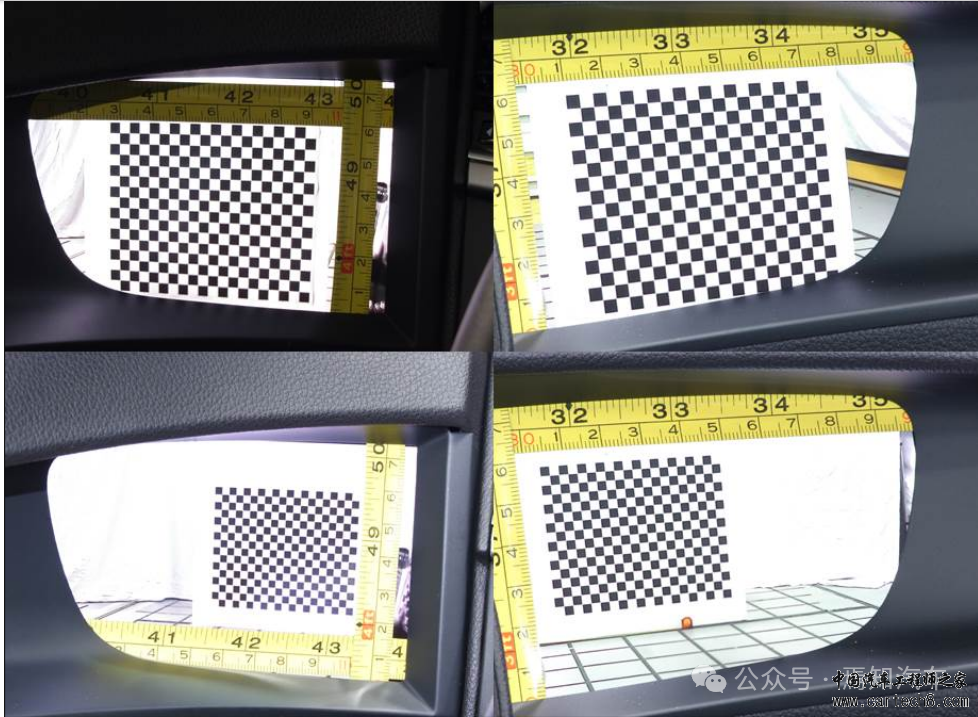 当然,如上标准化标定流程只是针对装配下显得CMS摄像头,售后的CMS在很多情况下可以自动校准摄像头,这也是CMS的一大优势体现。 智驾应用难点 由于CMS摄像头是通过单独的流媒体ECU进行曝光同步、ISP前端处理,且输入的帧率通常是为了更好的画质来做的,考虑到高速行车条件下,如果帧率不够的话(比如采用一般前侧视摄像头的30FPS),CMS的显示画面肯定会不可避免地出现卡顿。因此,对于CMS而言,高帧率必然是其作为流媒体的必要条件。行业内,比较推荐的是与后视流媒体一样的帧率60FPS。此时,就会出现一个问题,这么高的帧率且高清的视频如果想要替代侧后视,那必然是需要前端进行复杂的处理才能实现的。 举如下例子可以说明将如何下手开发: 1)曝光同步 由于智驾后端感知融合处理都需要确保在感知前融合中需要进行时间同步,由于CMS摄像头视单独的ECU控制,因此从曝光角度来说,CMS感知输入就不会和其他摄像头一致。因此,要想后端处理好这样的感知数据,就需要充分考虑在视频采集之初就进行曝光同步。 2)抽帧 如前序面分析的那样,CMS的高帧率视频要想在智驾域控端进行有效处理,就需要充分考虑其对处理能力的要求。同时,为了保证和其他视觉感知的输入能够处理的实时性和准确性,也会要求其输入帧率与其他视觉是一致的。此时,就需要参照一定的算法对原始CMS视频流进行抽帧处理。通常如果其他视觉是30FPS还好说,只要进行线性的隔帧抽样即可,但是如果有些感知处理处理25FPS这类非整数倍的视频流,那就必须想一些类似非线性抽帧策略进行抽帧。 3)ISP处理算法 ISP处理是视觉感知一个永远绕不开的话题,其中涉及的去噪、畸变矫正、宽动态调整等一系列算法在不同的算法供应商那里会得出千差万别的结果,比如较为主流的OV和Sony这两家供应商在ISP算法处理上就会显示出各自不同的优势和短板。即便是同一家ISP算法供应商,布局在不同的硬件ECU资源上,也会呈现出不同的ISP处理结果。这点,我们就需要注意了,要想确保CMS视频在与智驾系统其他感知传感器的后端融合上保持较好的匹配度,就需要提前确认好ISP处理软硬件差异,并确保存在的差异在可控范围内不会影响后续的感知融合模块。 4)传输带宽 传输带宽这个问题很容易理解,因为CMS摄像头安装的目的是想一比一复制真实的驾驶场景,这点上,无论是视野FOV还是像素上肯定都会采用高清显示技术,且考虑到驾驶场景要适应中高速,肯定也会采用高帧率,这就会导致其无论单帧视频图像还是多帧视频流都是需要较大的传输带宽的。 因此,要想好好利用CMS的视频图像,选择比较大传输带宽且传输稳定的中间介质也是非常重要的。 |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论