浅谈汽车PEPS系统的UWB定位技术
UWB 解决方案采用了三种相对成熟的定位算法: TOA(Time of Arrival,到达时间)、TDOA(Time Difference of Arrival,到达时差)和 AOA(Angel of Arrival,到达角度)。在具 ... ...
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
| UWB 解决方案采用了三种相对成熟的定位算法: TOA(Time of Arrival,到达时间)、TDOA(Time Difference of Arrival,到达时差)和 AOA(Angel of Arrival,到达角度)。在具体实施过程中,一般采用综合三种定位方法的混合定位方案,以实现最佳定位性能。 1 前言 时间的脚步永不停歇,PEPS 的创新也是如此。凭借更高的安全性、更快的响应速度和厘米级的定位精度,UWB 技术越来越受到汽车制造商的关注。2019年,车联网联盟(CCC)将UWB列为下一代汽车安全接入技术,UWB开始应用于汽车。2020 年 6 月,IEEE 更新了 UWB 相关标准(802.15.4z),增强了 UWB 的安全功能(PHY/RF 层),为 UWB 进入主流应用市场进一步铺平了道路。2021 年 7 月,CCC 联盟正式发布了 CCC Digital Key 3.0 规范,明确提出将 UWB 和 BLE(蓝牙)无线技术相结合,通过兼容的移动设备实现无源无钥匙进入和发动机启动PEPS。  2 UWB 定位算法 UWB 解决方案采用了三种相对成熟的定位算法: TOA(Time of Arrival,到达时间)、TDOA(Time Difference of Arrival,到达时差)和 AOA(Angel of Arrival,到达角度)。在具体实施过程中,一般采用综合三种定位方法的混合定位方案,以实现最佳定位性能。 TOA 采用圆形定位方法(见下图),通过测量移动终端与三个或更多 UWB 基站之间的距离来实现定位。将三个圆相交于一点,即可确定移动终端的位置。但由于多径、噪声等现象的存在,多圆不能相交或相交处不是点而是区域,因此实际上很少单独使用 TOA 定位。 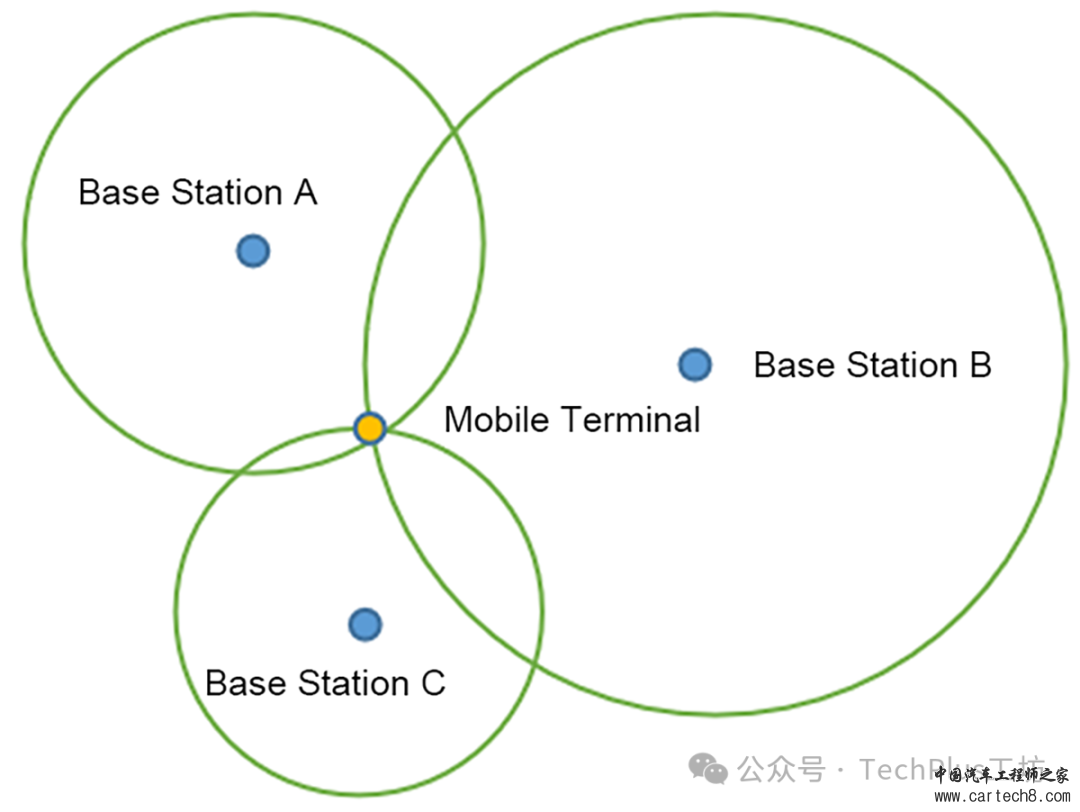 TOA 定位算法(圆形定位法) 与 TOA 相比,TDOA 在基站间进行精确同步,易于实现。如下图所示,移动终端与基站之间无需时间同步。首先计算移动终端与基站 A 之间的距离差和与基站 B 之间的距离差,移动终端必须位于以基站 A 和基站 B 为焦点的双曲线上。根据移动终端与基站 A 和基站 C 的距离差可以得到另一组双曲线,双曲线的交点就是移动终端的位置。在车辆空间范围内,还可以通过距离差来减少多径、噪声等的影响。 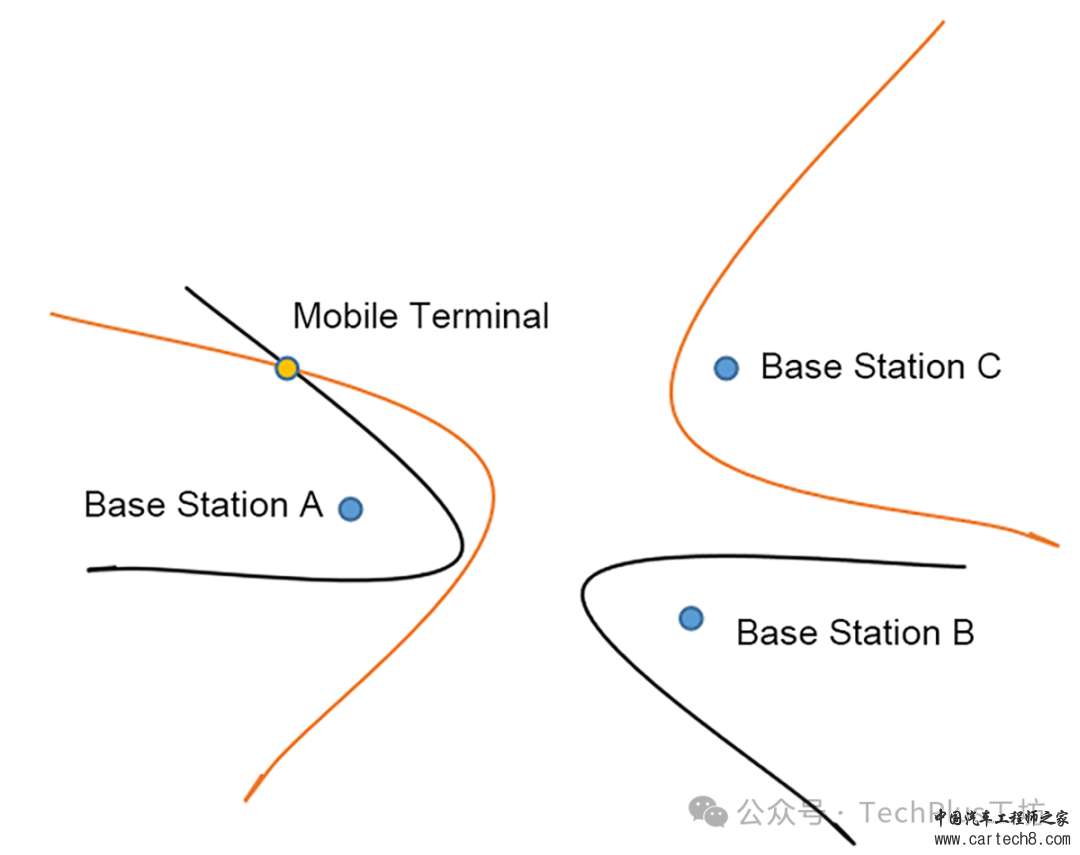 TDOA 定位算法 AOA 定位根据相位差原理计算到达角,只需两个基站即可实现定位。由于角度分辨率的问题,定位精度会随着与基站距离的增加而降低,主要用于中短距离的定位。 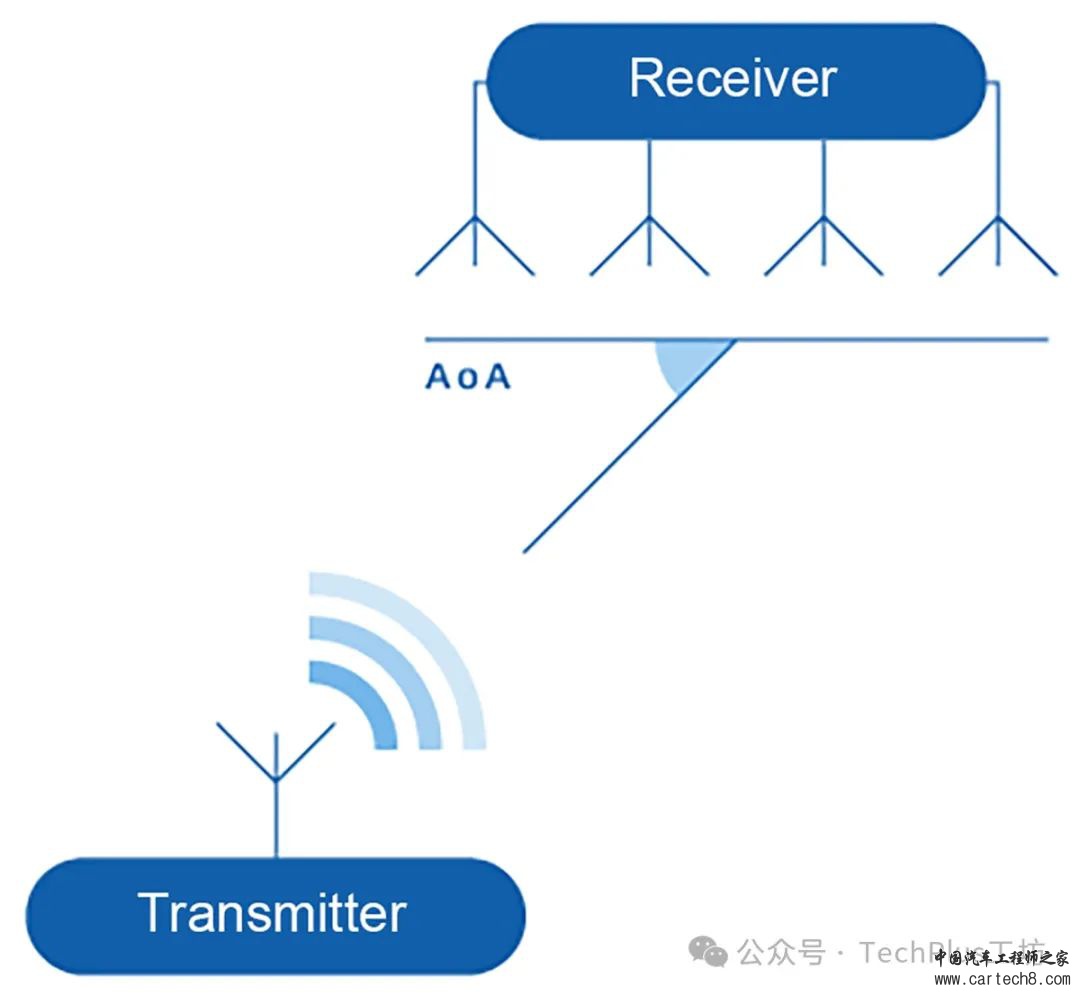 AOA 定位算法 3 应用场景 生命探测 作为一种超宽带无线载波通信技术,UWB 利用纳秒级非正弦窄脉冲传输数据。这项技术使 UWB 能够实现非凡的雷达功能。与普通雷达相比,UWB 雷达具有功耗低、毫米级分辨率、穿透力强、抗干扰能力强、适合短距离探测等诸多优点。作为一种生物雷达,UWB 尤其适用于生命探测。 例如,如果司机下车,车门会自动上锁。婴儿或可爱的宠物不小心落在了车里。汽车是否应该向司机发出警报?绝对有必要!UWB 可以很好地解决这个问题。 UWB 生物雷达可以远程检测人或动物的呼吸和心跳等生命体征,而无需任何电极或传感器接触活体。它不仅可以帮助 PEPS 系统防止人或动物被锁在车内的事故发生,还可以检测驾驶员的生理状态,当驾驶员在乘车过程中出现不适症状时发出提醒甚至及时干预。 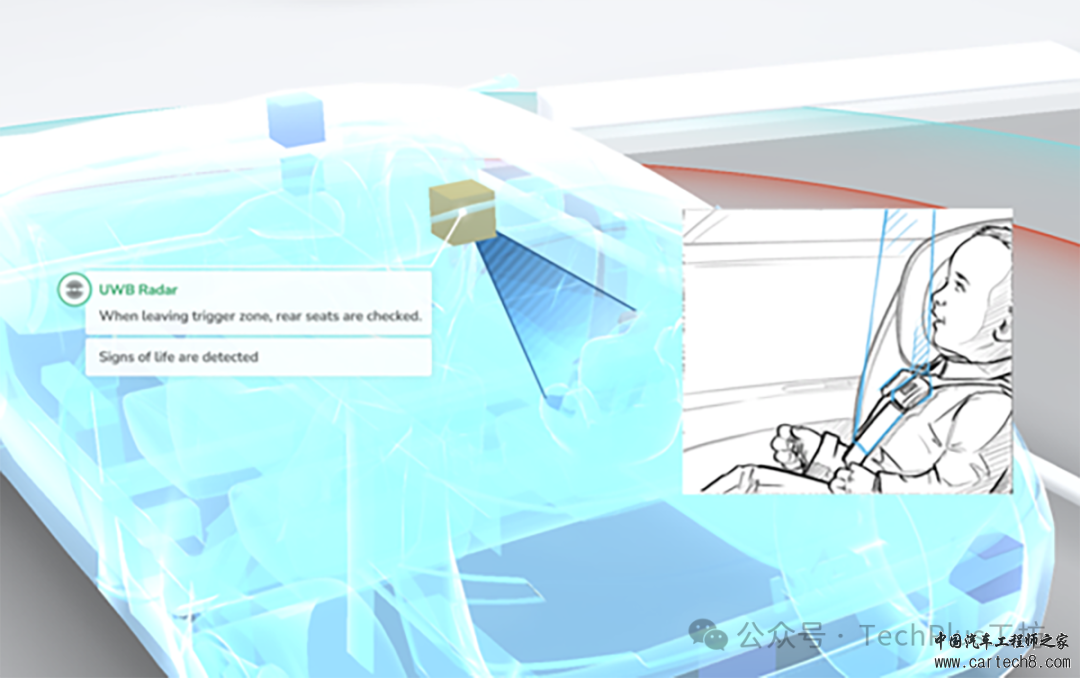 利用超宽带生物雷达进行生命探测 后备箱自动开启 除了车内生命探测,基于 UWB 雷达的运动感知功能,UWB 还巧妙地应用脚踢动作打开后备箱的功能。当驾驶员的身份到达车尾时,UWB 雷达可以准确检测到脚踢动作,从而自动打开车辆后备箱。 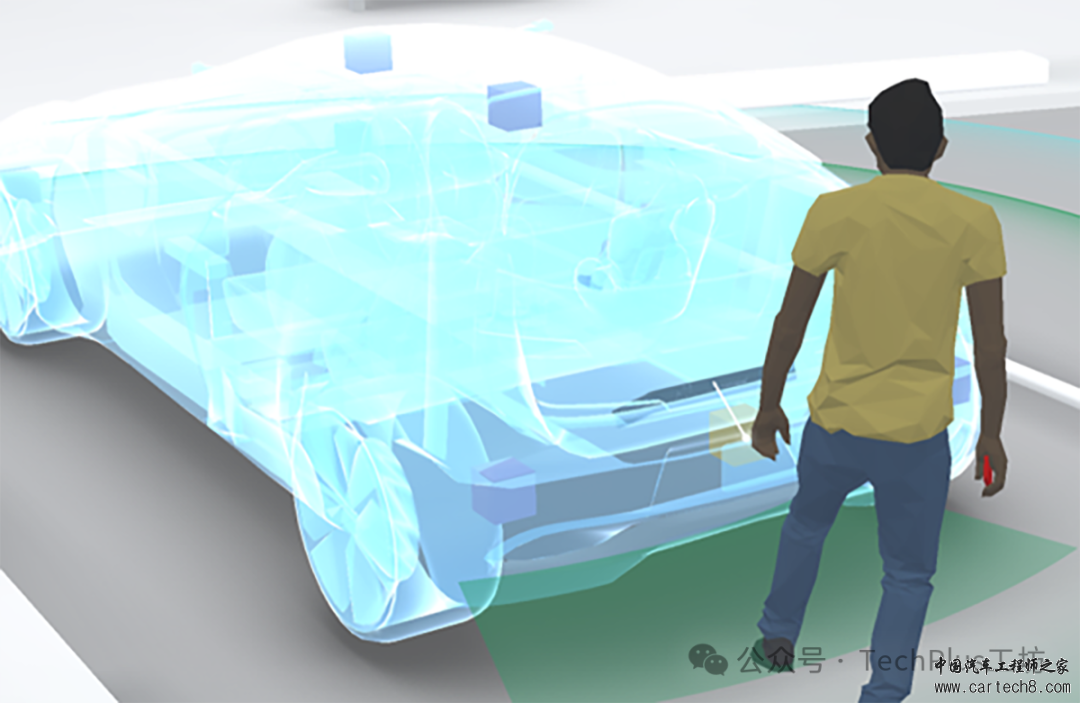 UWB 可实现 "一键开启 "解决方案 上述两个 UWB 雷达功能(包括 UWB 生物雷达和 UWB 踢脚雷达)不需要额外的硬件,只需重复使用车侧 UWB 硬件即可实现,无需增加额外的硬件成本。我们也可以将它们视为未来 UWB PEPS 功能的一部分。 支持 UWB 的自动代客泊车系统 AVP(自动代客泊车)是一种自动代客泊车功能。它被称为 L4 级自动驾驶技术,可为用户提供 "最后一公里的自由"。如下图所示,它是目前最有希望实现商业化的自动驾驶应用场景。 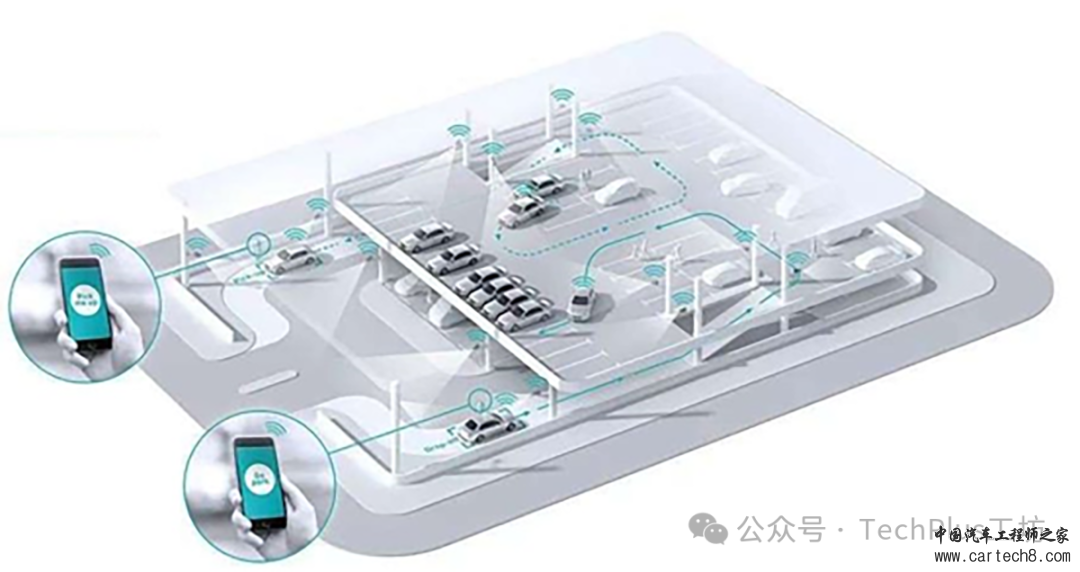 自动代客泊车系统 下图显示了可行的车端 UWB 节点布局方案。共有四个 UWB PEPS 节点布置在前大灯和尾灯处,第五个 UWB PEPS+AVP 节点布置在车顶。第五个节点既能接收车内的 UWB 信号,又能接收车外的 UWB 信号,同时也是实现 AVP 功能的关键节点。 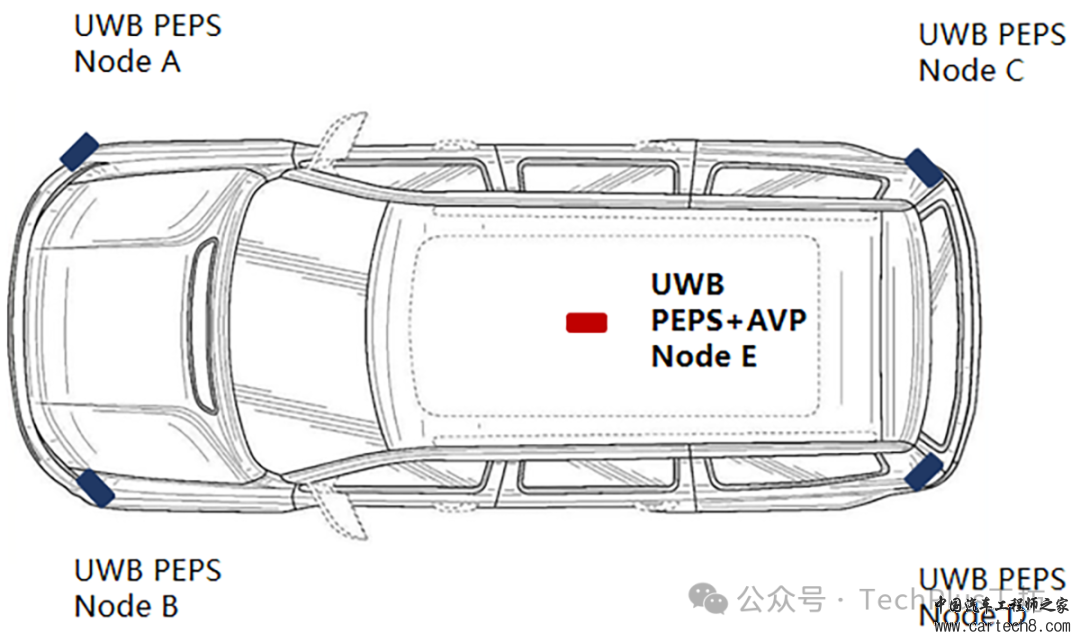 PEPS + AVP 架构 在 PEPS 模式下,第五个 UWB 节点与其他四个 UWB 节点合作完成对智能钥匙位置的测量,并将测距信息发送给体域控制器(BCM),完成对智能钥匙位置的计算,从而决定后续的解锁和启动操作。 进入 AVP 模式后,第五节点开始连续接收停车场内布设的 UWB 节点发布的 UWB 定位信息。车端 UWB 节点将接收到的定位信息发送给智能驾驶域控制器,实现车辆在车库中的坐标计算,然后传输给规划控制模块,实现 AVP 操作。  |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论