纯电动汽车制动能量回收策略研究
1. 引言近年来,能源短缺,环境污染等全球问题日益突出。与传统燃油汽车相比,纯电动汽车具有能量利用率高,结构简单,维修方便,噪音低,行驶过程中零污染等优点,因此纯电动汽车大有取代传统燃油汽车的趋势。然而 ...
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
1. 引言 近年来,能源短缺,环境污染等全球问题日益突出[1]。与传统燃油汽车相比,纯电动汽车具有能量利用率高,结构简单,维修方便,噪音低,行驶过程中零污染等优点,因此纯电动汽车大有取代传统燃油汽车的趋势[2][3] 。然而现有的纯电动汽车普遍具有续航里程普遍较短和充电速度较慢等问题,这严重制约了纯电动汽车的发展。由于现有技术的制约,很难有效通过增加动力电池的数量或者提升电池密度等方法来增加纯电动汽车的续驶里程[4]。因此,需要从其他方面入手提升纯电动汽车的续航,制动能量回收便是其一。 研究表明,汽车在行驶过程中,有大量的能量被消耗在制动过程中,这部分能量大约占到50%左右,最终以热能的形式消散,未能得到有效利用[5]。纯电动汽车在制动过程中,电动机的功能可转化为发电机,将汽车的部分动能转化为电能。与此同时,电机发电产生的电制动力矩,可以为纯电动汽车提供一定的再生制动力矩,使得机械制动需要承担的制动摩擦力矩减少,从而减缓制动器摩擦片磨损,提高汽车行驶安全性[6][7]。 Meng [8]设计了一种再生制动控制策略,该策略基于模糊控制,使其在满足汽车制动要求的同时,尽可能地回收制动能量。Montazeri-Gh和Mahmoodi-k [9]提出了一种电动汽车最优能量管理系统,该种控制策略基于遗传算法。根据该种控制策略又对电池初始荷电状态(SOC)和混合因子对混合动力汽车性能进行研究,分析了SOC和混合因子对制动回收的影响,并且评估了混合动力汽车的油耗和排放。试验结果表明,与原先配置相比,提出的控制策略可以使平均油耗降低约14%。而多种道路条件下可以减少大约10%的污染排放,有效的降低了汽车尾气排放带来的环境污染。美国北卡罗来纳州立大学的Gao [10]提出串联,并联两种控制策略,其中并联控制策略只采用固定比例分配方式,能够有效提升续驶里程,其结构相对简单,目前在现有纯电动客车上得到了广泛的应用。 本文基于前轮驱动式纯电动汽车,提出了一种控制策略,该策略综合考虑了汽车制动时的车速,电池SOC值等因素,在保证汽车制动稳定性的前提下,将制动时的部分动能转化为电能。经过仿真结果验证,在NEDC工况下,汽车再生制动能量回收效率为10.8%,证明该策略能够有效提升纯电动汽车的能量利用率,增加纯电动汽车的续驶里程。 2. 纯电动汽车制动能量回收理论 2.1. 纯电动汽车制动过程动力学分析 纯电动汽车在制动过程中受到阻力主要有滚动阻力Ff,空气阻力Fw,坡度阻力Fi和复合制动力Fb,这四个力之和,使汽车能够减缓车速乃至停车[11]。由整车动力学可知  其中,滚动阻力Ff  空气阻力Fw  坡度阻力Fi  复合制动力Fb  式中,Fu为前后轮地面制动力,Fm为电机制动力  其中μ为地面附着系数,Tm为电机输出扭矩,i0为主传动比,ig为主传动比,ηt为传动系效率,r为车轮半径。 2.2. 制动能量回收的基本结构和原理  图1. 制动能量回收系统的基本结构 与传统燃油汽车相比,制动能量回收是纯电动汽车独有的功能[12]。纯电动汽车的唯一动力来源是电机。制动能量回收控制策略集成在制动控制器中,在制动过程中,相关传感器将将采集到的制动踏板信号传输到制动控制器中,随后制动控制器计算所需总的制动力,并对车速,SOC,电机转矩,汽车行驶状态等进行分析,分配机械制动和再生制动的比例,如果满足条件,能够进行制动能量回收,电机控制器就会收到信号后控制电机反转,在此期间,电机用作为发电机,将汽车的一部分动能转化为电能通过功率转换器储存到电池当中。因此,该功能可以有效的提升纯电动汽车的续驶里程。(图1) 2.3. 制动能量回收评价指标 纯电动汽车制动能量回收可以用制动能量回收的效果可以用制动能量回收率η来评价[13]。在制动过程中,汽车动力电池释放的能量为:  动力电池实际回收的能量为:  其中,v2为制动后的车速;v1为制动前的车速; 所以汽车再生制动能量回收率η为:  3. 制动能量回收关键影响因素分析 对于纯电动汽车来说,在满足制动稳定性的前提下,将制动时的动能尽可能的转化为电能。但是许多因素都对制动回收产生重要影响,如汽车ECE制动法规,蓄电池的充电功率,电机性能约束以及行驶工况等[14]。 3.1. ECE制动法规约束 3.1.1. 前后轮制动力分配 纯电动汽车在制动过程中,一般会发生一下三种情况。(1) 当前轮比后轮先抱死时,在这种情况下,汽车车辆不能够完全利用道路的附着条件,同时丧失转向能力,应当避免。(2) 当后轮比前轮先抱死时,如果汽车制动时的车速较高,则极易发生侧滑,所以必须避免。(3) 当前、后轮同时抱死时,在这种情况下汽车处于稳定的状态,可以充分利用地面的附着条件,所以是三种情况中较为安全的情况。 综上所述,为保证汽车制动时的安全性,在制动时前后轮应当同时抱死,此时汽车前,后轴制动力分配按照理想制动力分配曲线,即为I曲线。如图所示  见图2,当前后轮制动分配位于I曲线下方时,汽车前轮先抱死,后轮后抱死,所以属于较为安全的工况;当位于I曲线上方时,汽车的后轮先抱死,属于危险工况。所以制动力分配应该在I曲线下方。 3.1.2. ECE制动法规 欧洲经济委员会(ECE)明确规定了当汽车的利用附着系数φ值处于0.2~0.8之间时,制动时必须符合以下条件[15]:  其中,φi:第i轴的制动力与地面对该轴的法向反力之比 这些条件使汽车在制动时可以兼顾稳定性和制动强度。同时为了保证制动时汽车的前轮先于或者同时与后轮抱死,ECE还规定了前轴的利用附着系数要大于后轴的利用附着系数,所以综上可得:  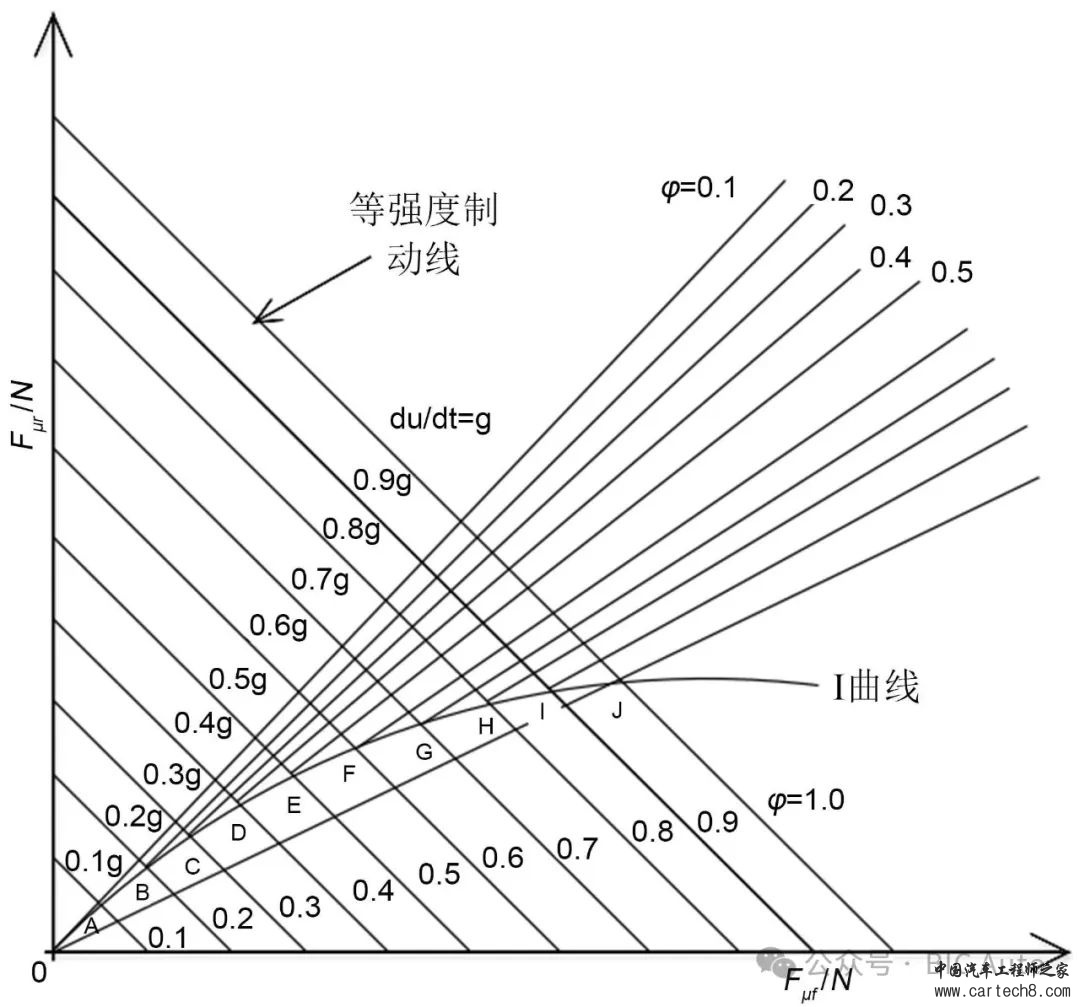 图2. 理想前后制动力分配曲线(I曲线) ECE制动法规边界曲线又称为M曲线,见图3  图3. ECE制动法规曲线图(M曲线) 综上所述,为满足纯电动汽车制动安全性和ECE法规,制动力分配区间应在I曲线和M曲线之间,并且尽量靠近I曲线。 3.2. 电机制动力矩约束 制动过程中电机所提供再生制动转矩的大小影响着制动时电机所能够提供制动力的大小,而电机转速特性及车速等因素影响着电机所提供制动转矩的大小。电机的转矩特性可以用公式: 当n<ne时  n≥ne时  其中,Tm:电机的再生制动转矩(Nm);Tmax:电机的最大转矩(N·m); ne:电机的额定转速(r/min);Pe:电机额定功率(kw)。 当电机转速较低时,此时汽车速度较低,此时如果开启再生制动系统,不仅无法回收较多的能量,反而可能会对汽车制动时的安全性造成影响。 当电机转速小于50 r/min时,关闭再生制动。所以最终的公式为(16)所示:  3.3. 电池SOC值约束 制动时,当汽车电池SOC大于0.8或者小于0.2时,应当关闭再生制动。因为是考虑到对电池的保护。若电池SOC值大于0.8时,为了避免电池过度充电,延长电池寿命,关闭再生制动;小于0.2时,汽车进入回家模式,在限制电量输出的同时制动能量回收系统也要关闭;所以当0.2 ≤ SOC ≤ 0.8时,开启制动能量回收系统,由制动强度z来分配再生制动和机械摩擦制动。 3.4. 制动能量回收策略的具体设定 综上所述,当汽车车速v < 5 km/h且0.2 ≤ SOC ≤ 0.8时,开启制动能量回收系统。 纯电动汽车的前后轴制动力分配策略根据制动强度大小可以分为电机制动,机电复合制动两个阶段: (1) 电机制动(0 ≤ z ≤ 0.1) 由上文ECE法规及式子(12)可知,M曲线与横坐标的交点(Fμ2 = 0时)将相关数据代入(12)可得z约等于0.1,此时在电机制动阶段,制动强度较小,此时整车所需制动力全部由电机提供,机械制动系统不参与工作。此时前后轴机械摩擦制动力为0,所以制动力具体分配为:  (2) 机电复合制动(0.1 < z < 0.8) 当制动强度z大于0.1时,机械制动和电机制动系统同时参与工作,前后轴制动力分配按照I曲线进行分配,其中又可分为两种情况: 当电机最大制动力大于前轴所需制动力时,前轴制动力由电机提供;当电机最大制动力小于前轴所需制动力时,电机提供其最大制动力,剩余前轮所需制动力由前轮机械摩擦制动力提供制动力由。后轴的机械摩擦制动力的分配按照I曲线来分配。 当前轴所需制动力能全部由电机提供时,制动力分配为:  当前轴所需制动力大于电机制动力时:  (3) 机械制动(z > 0.8) 当制动强度z较大时,属于紧急制动情况,以汽车的安全性为前提,所以仅有机械制动系统工作,电机制动系统不参与工作。  综上所述,纯电动汽车控制策略流程见图4:  图4. 纯电动汽车制动能量回收控制策略流程图 4. 建模与仿真 以某款前轮驱动纯电动汽车作为研究对象,首先在AVL-Cruise软件中搭建整车模型,整车基本参数见表1所示。 基于上文第三章设计的纯电动汽车制动能量回收策略,利用MATLAB/Simulink搭建控制策略模型,模型见图5所示。该控制策略模型主要包括制动强度计算模块,电机充电限制扭矩模块,电池充电限制模块,车速,SOC值限制模块以及制动力分配计算模块等。然后生成DLL文件并嵌入到AVL-Cruise软件搭建的整车模型中,实现联合仿真。 表1. 整车基本参数
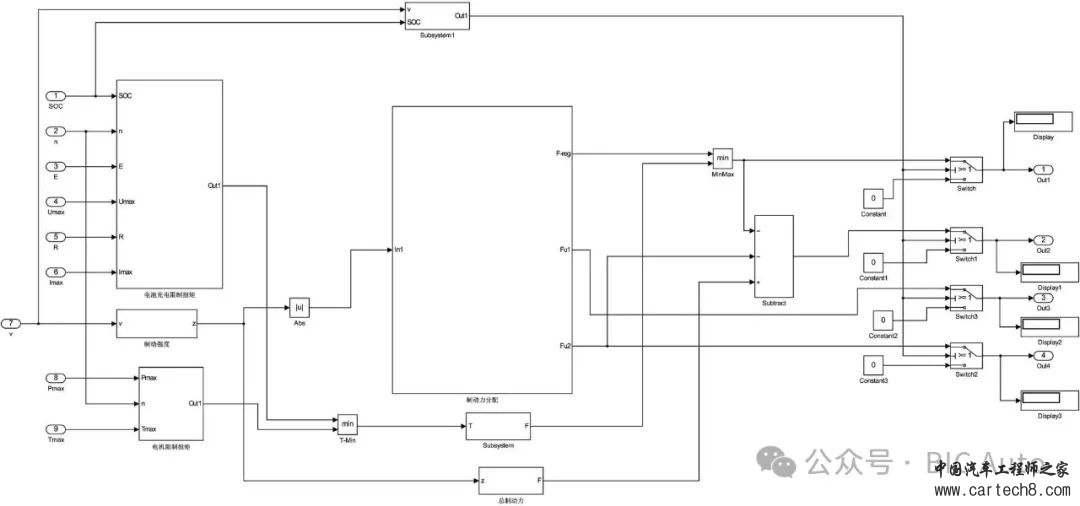 图5. 纯电动汽车制动能量回收控制策略模型 5. 仿真结果分析 循环工况NEDC (New European Driving Cycle)主要有欧洲、中国等国家或地区使用[16]。NEDC循环工况共1190 s,该工况有4个市区和1个郊区循环工况。为了尽可能的模拟实际的市区市郊道路情况,NEDC还对对不同的工况下的车速作了不同的规定,同时会有不断的加速减速,因此可以用来验证制动能量回收效果。电池SOC初始值定为80%,固定步长为0.01 s,循环时间为1190 s。NEDC循环工况车速变化见图6所示。(图7) 从图8中可以看出循环工况开始后,电池的SOC值总体上呈现下降的趋势,但是从局部来看会有短暂的回升,表明有制动能量回收。 图9为纯电动汽车的总的能量输出,输入,电池能量的输出,输入。由该图可知,运行完NEDC工况后,纯电动汽车总的能量输出为5994 KJ,总的能量输入为645 KJ,所以可由公式(9)可知,汽车再生制动能量回收率η = 10.8%,所以可以证明本文所选用的制动能量回收控制策略有效,也证明了制动能量回收能够有效的延长汽车的续驶里程,对纯电动汽车的发展具有重要意义。 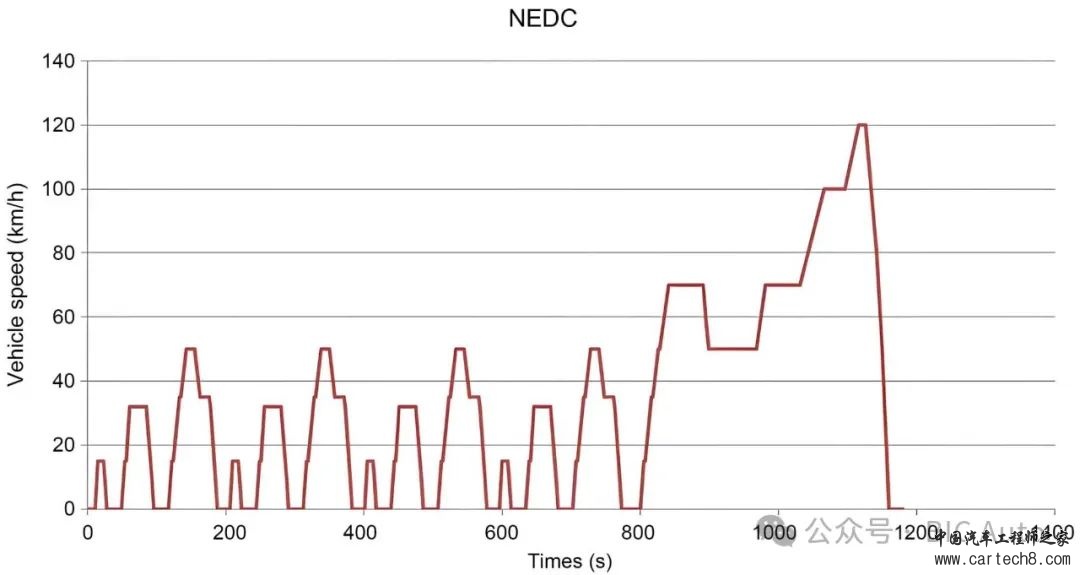 图6. NEDC循环工况车速变化 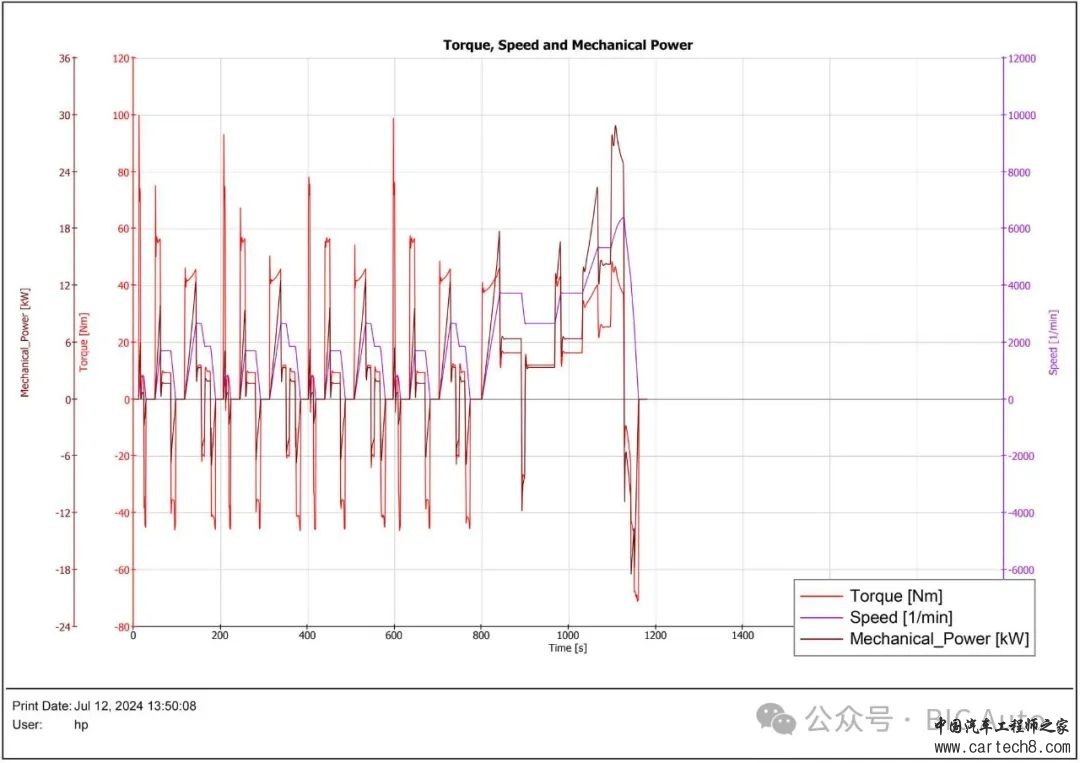 图7. 电机扭矩,电机转速,电机功率 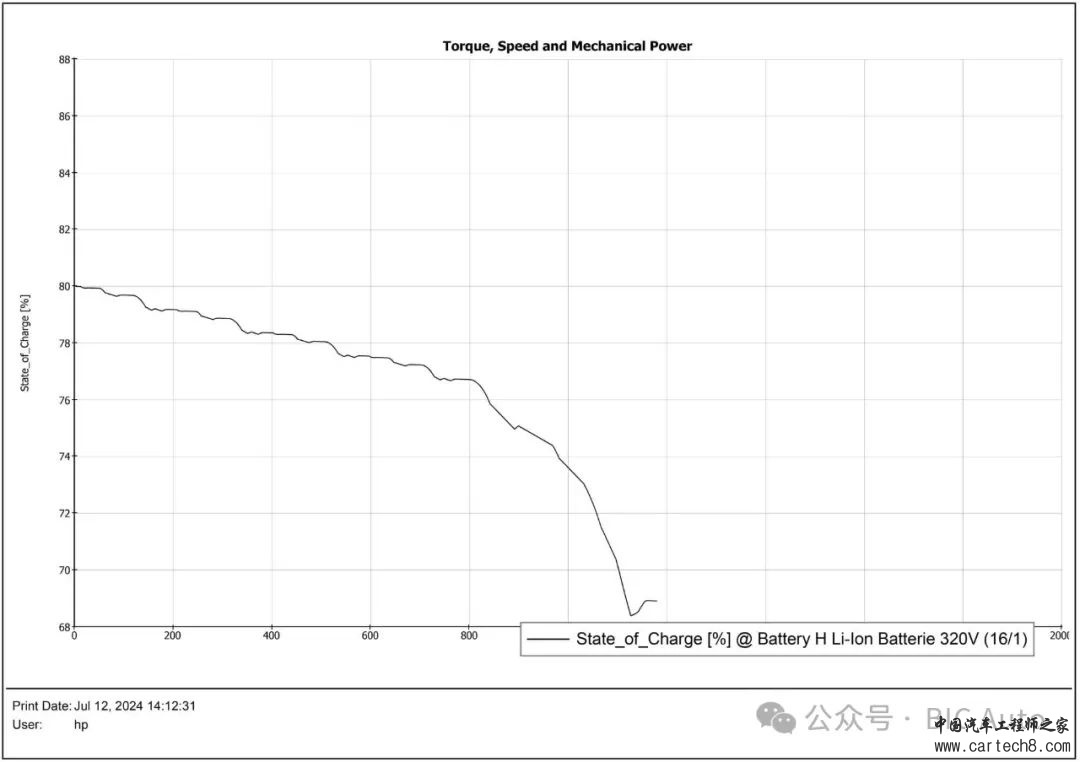 图8. 动力电池电荷状态SOC值变化图 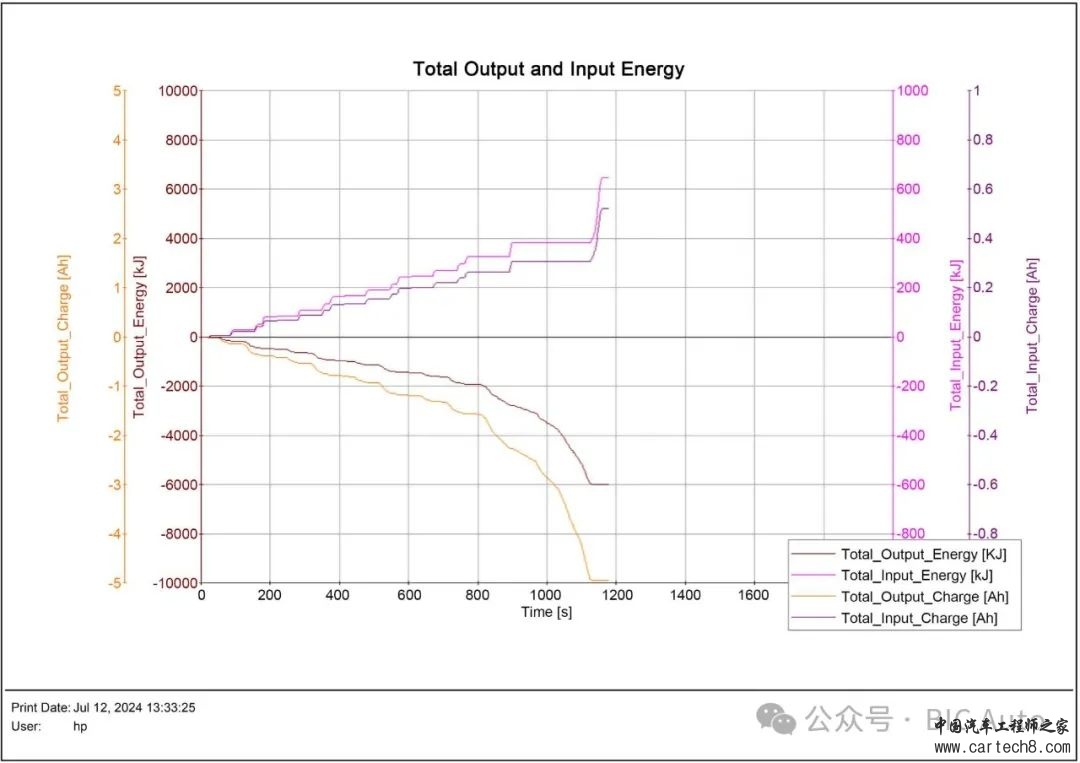 图9. 纯电动汽车总的能量输出输入 6. 结论 本文以前驱纯电动汽车为研究对象,针对纯电动汽车续航里程普遍较短的问题,从提高纯电动汽车制动能量回收效率为目标,对整车制动过程动力学进行了分析,分析了制动过程中前,后轴制动力分配原则,明确了汽车安全制动分配范围,提出了一种纯电动汽车制动能量回收控制策略,该策略综合考虑了制动过程中的车速,电池SOC值,电机再生制动力矩等因素。分别使用Simulink和Cruise软件搭建控制策略模型和整车模型并进行联合仿真。依据仿真结果,在循环一个NEDC工况下,汽车SOC值整体呈现下降趋势,但是局部有明显回收,汽车能量总输出为5994 KJ,总输入为645 KJ,制动能量回收率为10.8%。证明了本文设计的制动能量回收控制策略有效。 参考文献
|
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共2条 发表评论发表我的评论