汽车电动助力转向系统的技术分析
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
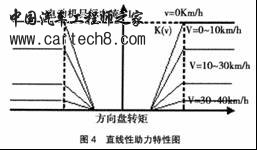
4.1 助力控制 助力控制是在转向过程(转向角增大)中为减轻转向盘的操纵力,通过减速机构把电机转矩作用到机械转向系(转向轴、齿轮、齿条)上的一种基本控制模式。 步骤如下: (1)输入由车速传感器测得的车速信号; (2)输人由转向盘转矩传感器测得的转向盘力矩大小和方向; (3)根据车速和转向盘力矩,由助力特性得到电动机目标电流; (4)通过电动机电流控制器控制电动机输出力矩。在这一基本控制过程中,助力特性曲线确定系统的控制目标,决定着EPS系统的性能。EPS的助力特性曲线属于车速感应型,在同一转向盘力矩输人下,电动机的目标电流随车速的增加而降低,能较好地兼顾轻便性与路感的要求。
4.2 回正控制 当汽车以一定速度行驶时,由于转向轮主销后倾角和主销内倾角的存在,使得转向轮具有自动回正的作用。随着车速的提高,回正转矩增大,而轮胎与地面的侧向附着系数却减小,二者综合作用使得回正性能提高。驾驶员松开转向盘后,随着作用在转向盘上的力的减小,转向盘将在回正力矩的作用下回正。在转向盘回正过程中,有两种情况需要考虑:(1)回正力矩过大,引起转向盘位置超调;(2)回正力矩过小,转向盘不能回到中间位置。对前一种情况,可以利用电动机的阻尼来防止出现超调。后一种情况需要对助力进行补偿,以增加回正能力。 根据转向盘转矩和转动的方向可以判断转向盘是否处于回正状态。回正控制的内容有:低速行驶转向回正过程中,EPS系统H桥实行断路控制,保持机械系统原有的回正特性;高速行驶转向回正时,为防止回正超调,采用阻尼控制。 4.3 阻尼控制 阻尼控制是针对汽车高速直线行驶稳定性和快速转向收敛性提出的。汽车高速直线行驶时,如果转向过于灵敏、“轻便”,驾驶员就会有通常说的 “飘”的感觉,这给驾驶带来很大的危险。为提高高速行驶时驾驶的稳定性,提出在死区范围内进行阻尼控制,适当加重转向盘的阻力,最终体现在高速行驶时手感的‘稳重”。汽车高速行驶时,由于路面偶然因素的干扰引起的侧向加速度较大,传到方向盘的力矩比低速行驶时要大,为了抑制这种横摆振动,必须采用阻尼控制;此外,转向盘转向后回到中间位置时,由于电动机的惯性存在,在不加其他控制情况下,助力系统的惯性比机械式转向系统的惯性大,转向回正时不容易收敛,此时,也需采用阻尼控制。采用阻尼控制时,只需将电动机输出为制动状态,就可使电动机产生阻尼效果。 << 前一页 下一页 >> |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论