基于FPGA平台构建汽车辅助驾驶系统算法
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
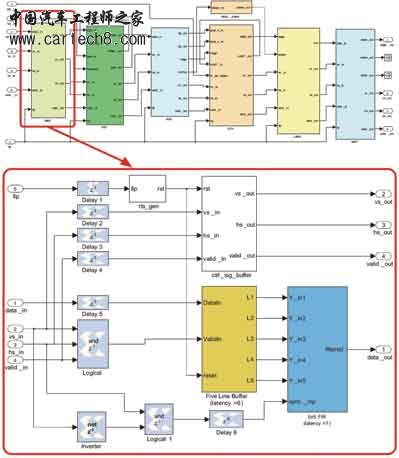
此外,还可使用这种行为模型,并通过实际视频数据测试滤波器,进而调节掩模系数。还可以通过验证System Generator for DSP子系统的输出是否与MATLAB函数的输出相等(在规定的误差范围内,这是因为MATLAB是以浮点方式工作,而System Generator 则以固点算法方式工作)来验证硬件。 2-D GNR模块以流线方式(即逐行方式)对输入图像进行处理。图3显示了整个预处理链的System Generator顶级方框图以及高斯噪声抑制功能的顶级方框图。
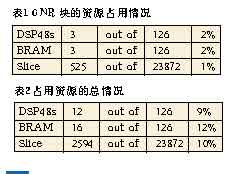
图3 顶级预处理与高斯噪声抑制方框图 System Generator FPGA综合结果 开发人员在开发辅助驾驶系统时必须以适合大规模生产的成本水平进行设计。 达到一定处理性能所需的裸片资源将决定他们所需的FPGA器件的尺寸,进而决定其成本。 在实施车道偏离警告预处理器过程中,以XA Spartan-3A DSP 3400为目标。采用这种方法,并利用该模型来支持未来规划中的开发活动。但是,对预处理功能所占用资源的分析表明,该设计适合小得多的器件。 表1给出了XA Spartan-3A DSP 3400器件上GNR块的资源占用情况。计算时,假定在VGA分辨率下灰度输入图像的帧速率为30Hz(即输入数据速率为 9.2MS/s)。 从定时性能角度,GNR 设计以168.32 MHz 的时钟频率运行,可接受数据传输速率高达 18.72 MS/s的输入数据。 整个车道检测预处理子系统所需资源总情况如表2所示。
相应的定时性能分析表明,时钟频率为128.24MHz,最高输入数据传输速率为14.2MS/s。 根据上述所需资源情况分析,预处理功能甚至可用于XA Spartan-3E 500,其密度大约为XA Spartan-3A 3400A器件的1/7。 结果 图4给出了一个LDW系统的性能图样,包括用于车道线备用物提取的基于 FPGA的图像预处理功能。可以看到,右边两个图片中的输入帧。左边的一对图像显示的是我们在FPGA中实施的预处理功能的性能。左上角的图片显示的则是阈值化后边缘检测函数的幅值。左下角图片是在边缘细化和车道线模式搜索处理后拍摄的。很明显,LDW预处理器能非常有效地摄取道路图景,并能将数据减少至基本车道线选取物。右上角和右下角图片中的黄线和红线分别表示对基于简单直线道路模型的车道标线的瞬间跟踪计算结果。
图4 LDW处理模型输出 1 0 (请您对文章做出评价) |

文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论