从阿维塔11看ADS2.0自动泊车系统
从阿维塔11看ADS2.0自动泊车系统
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
| 遥遥领先!再次遥遥领先!继续遥遥领先!还是遥遥领先!一直遥遥领先! 今天华为连大A都拯救了,那不得不吹一波了。 最近同事喜提了一辆AVATR11,心血来潮(shang ban mo yu)去停车场试了下自动泊车功能(APA),正巧今天大A遥遥领先,就聊聊ADS2.0自动泊车的功能表现吧。 以下按照泊车功能对该系统做出评价,内容均为个人主观评价,花粉不喜勿喷(狗头保命)~
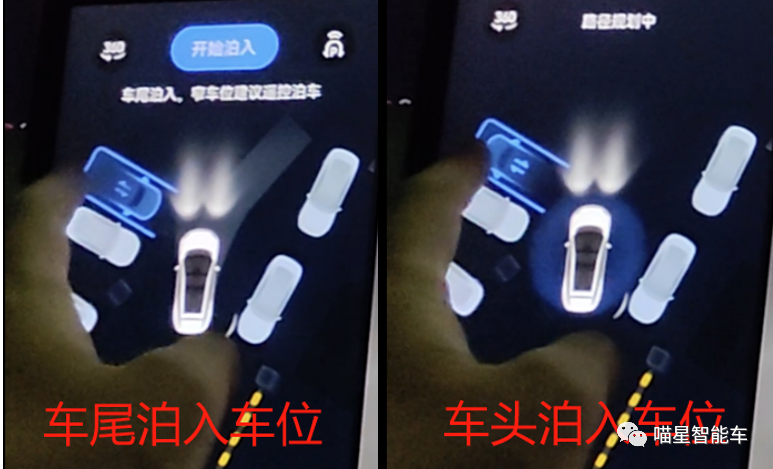
总体评价:ADS2.0的自动泊车系统已经能够满足日常使用的要求,且智能程度较高,符合人类开车习惯。在目前笔者已经试驾过的众多车型中,确实能够称得上是处于领先的地位。 美中有点点点不足:未实现自选车位功能(在无车位情况下,用户自定义选择拖动车位模型,作为目标泊入位置实现泊车)。该功能在无车位场景下使用还是较为方便的。 碍于时间关系,AVP就先不聊了,下次再说啦。 |







文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论