车辆自动紧急制动建模与分析
引言在如今的车辆自动紧急刹车系统(AEB)中[1] , 车辆往往通过接收搭载于车身的摄像头、毫米波雷 达或激光雷达等设备,获取与前方目标车辆或障碍 物的位置信息(如纵向的相对距离)、方位角信息、 相对速度 ...
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
引言 在如今的车辆自动紧急刹车系统(AEB)中[1],车辆往往通过接收搭载于车身的摄像头、毫米波雷达或激光雷达等设备,获取与前方目标车辆或障碍物的位置信息(如纵向的相对距离)、方位角信息、相对速度信息以及相对加速度信息等,经过传感器融合模块处理(单一传感器则不需要经过融合)[2],得到可信度较高的控制模块关键输入信息,由控制系统综合自身状态来判断车辆是否存在前向碰撞危险以及存在危险情况下是否需要执行警告、是否以一定 的 预 设 制 动 减 速 度 进 行 制 动。本 文 基 于Matlab / SimuLink 环境构建了一套 AEB 模型,并进行了测试与分析。 1 基于碰撞时间的安全距离分析 要实现 AEB 的纵向避撞功能,应当在实际的驾驶场景中提取出 AEB 较为关心的参数[3],分析与前车/ 障碍物的相对状况,判断自车是否处于安全状态;如有碰撞风险,再设定发生碰撞的几个不同阶段的参数阈值以及相应阶段的执行动作。 典型前向碰撞风险工况下[4],抽象出的自车与目标车示意如图 1 所示。 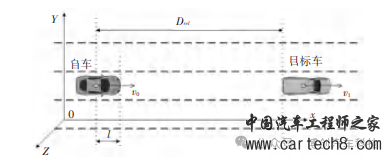 图 1 前向碰撞示意图 在图 1 中, 自车、前车示意图构建在世界坐标系O - XYZ 下,假定两车的速度均为 X 轴正向,两车自始至终的 Y 方向坐标都没有发生变化;某一时刻下,自车纵坐标为 X0 ,前车纵坐标为 X1 ,自车车速为v0 ,前车车速为 v1 。构建这一时刻下的车辆前向碰撞危险系数 TTC 和 FCR 如下: 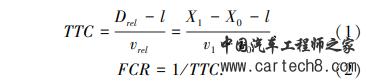 其中, Drel 和 vrel 分别表示自车相对于前车的相对距离和相对速度,l 表示自车质心到车头的距离。TTC 和 FCR 共同作为判定参数,作为此后的纵向和横向控制的最关键参数。TTC 参数主要作为纵向控制算法,FCR 参数作为横向控制的主要输入参数。本文中构建的逻辑框图见图 2。  图 2 前向碰撞逻辑框图 当 TTC 为正时,两车距离逐渐增大,不会出现碰撞危险;TTC 为正无穷或负无穷大时,表明两车车速接近,由于此时两车存在一定距离,故而不会出现危险情况;当 TTC 为负、且绝对值大于一定阈值时,两车逐渐靠近但未来一段时间仍保有相当的距离,系统判定也不会出现危险情况;当 TTC 为负且绝对值小于或等于一定阈值时,系统判定两车相对距离过小,触发碰撞警报,提醒驾驶员干预进行避撞;如果驾驶员没有做出动作且 TTC 为负、绝对值进一步减小,系统发出命令,制动机构按照一定的逻辑进行分级制动。 2 纵向避撞算法模型搭建 根据前文构建的安全距离模型以及碰撞逻辑[5],本文在 Matlab / SimuLink 环境下搭建了一套纵向避撞模型。设计的 AEB 算法输入为与目标车的距离、目标车的速度以及自车速度;输出为发生碰撞标志位、车辆刹停标志位、AEB 工作标志位、碰撞预警标志位以及制动系统工作输出的期望减速度。 2.1 TTC 计算模块 首先介绍 TTC 计算模块的具体构成,其内部如图 3 所示。  图 3 TTC 计算模块 TTC 计算的输入为相对距离和相对速度,在进行计算时二者并非直接相除,需要经历一定的限制和处理。相对距离进入模块后首先减去了一个预设的前向偏移量 headwayOffset (这里取 2.4 m)。最终,计算得到的 TTC 参数由输出传入控制决策模块[6]。 2.2 预计刹停时间计算模块 本文的刹停时间计算分为了 3 级制动时间的计算外加一个碰撞警告时间的计算,依据一些经验值得到这 4 个时间结果。该模块如图 4 所示。 本模块的主要输入是自车的车速。首先进行常规刹停时间计算,其目的是假定驾驶员在当前时刻意识到危险并开始制动,制动减速度取一典型值情况下的刹停时间:通过自车车速除以平均减速度driver_decel (这里取 4 m / s2),求得初步的从当前车速至刹停时间后,再加上一补偿值 timeToReact, 该值代表了驾驶员的平均反应时间(这里取 1.2 s),然后相加求得驾驶员操纵下的预计刹停时间。与此同时,自车车速还将经历 3 个不同减速度(由上至下分别为 3.8 m / s2、5.3 m / s2、9.8 m / s2)下的刹停时间计算,计算过程与预计刹停时间相似。 求得的 4 个刹停时间是下一小节分级制动逻辑的基本参数。 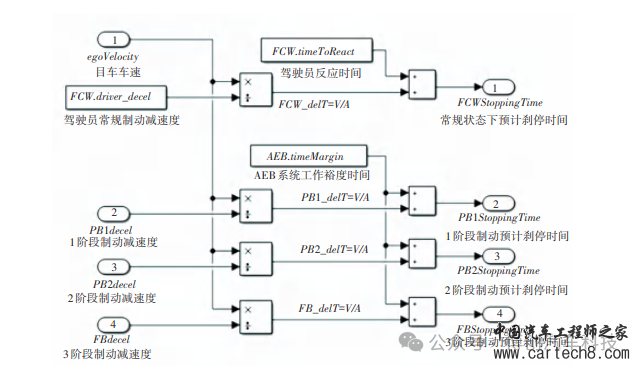 图 4 预计刹停时间计算模块 2.3 AEB 决策逻辑 TTC 是当前时刻的车速得到,是实际现在产生的参数;而 4 个刹停时间是由 4 个预设值得到,当前的制动力并非刚好是其中的某一个,因此这 4 个刹停时间参数有一定的预测含义,会对未来的车辆状态做出合理的估计。AEB 的决策逻辑,则如图 5 所示。  图 5 预计刹停时间计算模块 该模块由 SimuLink / StateFlow 工具构建得到。由图 5 可知,决策模块一共有 5 个状态:初始默认状态(Default)、前向碰撞预警状态( FCW)、一阶段制动状态(Pratial_Braking1)、二阶段制动状态(Pratial_Braking2)以及全力制动状态(Full_Braking)。每个状态都对应有 3 个状态进入赋值语句,分别对 AEB状态位、前向碰撞警告位进行置位操作,以及输出对应状态的制动减速度。 在初始默认状态,AEB 标志位、FCW 标志位和期望减速度均为 0;当 TTC 为负且小于驾驶员常规状态刹停时间时,即满足迁移条件时,状态发生迁移进入前向碰撞预警状态;前向碰撞预警状态活跃后,立即执行进入动作:AEB 状态位置 0,FCW 状态位置 1,减速度输出 0;当 TTC 绝对值大于 1.2 倍的常规刹停时间,认定车辆安全,系统返回默认状态;当进入FCW 状态后, TTC 为负且绝对值进一步减小到小于1阶段预计刹停时间,发生状态迁移,进入 1 阶段制动状态,AEB 开始工作,AEB 状态位置 0,FCW 状态位依旧置 1,减速度输出 PB1decel;余下的 2 阶段制动状态以及全力制动状态迁入逻辑相同,不再赘述。 3 前向静止目标避撞测试及分析 为了对本文构建的 AEB 模型进行功能测试,本文采用了 Matlab 提供的自动驾驶工具箱构建了仿真环境,选取了 C-NCAP 测试标准(2018 版) 中的CCRs 测试场景进行测试,并分析实验结果。 3.1 Matlab 自动驾驶工具箱介绍 MathWorks 公司自 2017 年开始,在 Matlab 软件中提供了用于自动驾驶的工具箱,主要用于 ADAS 功能的开发、仿真和测试,同时也提供了较为丰富的样例算法和工程。本文的纵向避撞算法利用了 Matlab自动驾驶仿真工具箱的自动紧急制动样例,将原工程中的车辆模型、世界模型以及车辆传感器及其融合模块予以保留,将示例的控制模块替换为本文构建的纵向紧急避撞算法模型,匹配好接口参数直至工程编译通过。重新构建的仿真环境如图 6 所示。 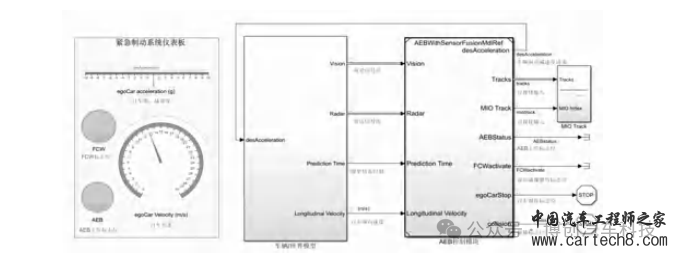 图 6 AEB 仿真测试环境Fig. 6 AEB simulation test environm 仿真环境分为仪表板、世界/ 车辆模型和控制模块三大部分。其中,仪表板用于可视化观测自车状态,世界/ 车辆模型负责提供仿真环境,并输出信号流到控制模块,同时世界/ 车辆模型接收来自控制模块的控制量(这里为减速度请求)。本测试环境可进行完整的闭环控制,用于测试前文的控制算法。 3.2 测试场景说明及结果分析 在 CCRs 测试中,存在自车和前车两个对象,两车航向角均为 0,其中前车静止。C-NCAP 规定的自车初速分别为 20 km / h、30 km / h 和 40 km / h,自车从后方逐渐靠近前车,AEB 此时应在某一时刻触发并完成避撞。 本文使用 Driving Scenario Designer 构建车道、自车和前车的可视化模型, 由于 C - NCAP 对于CCRs 的两车初始距离并未做规定,本小节将初始距离 S0 以及自车初速 v0 作为变量,测试构建的 AEB算法响应情况和工作效果。 在图 7 所示的参数设置选项中,设置两车的初始速度和初始坐标(按照世界坐标系赋值),每次设置完成后导入测试环境中,进行测试。 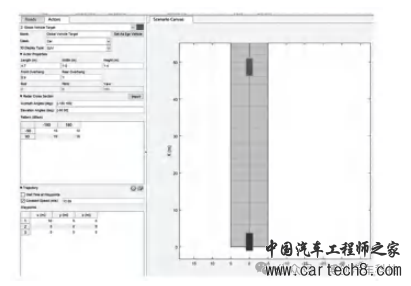 图 7 CCRs 仿真参数设置 设置初始距离 S0 分别为 100 m、50 m 和 30 m共 3 组仿真试验,每组试验下分别设置 20 km / h、40 km / h、60 km / h 和 80 km / h,共 4 组初速 v0 。对应如上设置参数进行仿真试验,得到了测试结果见表 1~表 3。 表 1 100 m 初始距离下 AEB 仿真测试结果 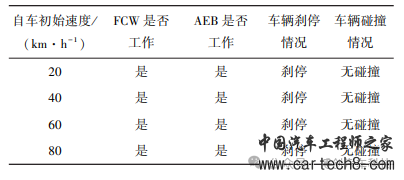 表 2 50 m 初始距离下 AEB 仿真测试结果  表 3 30 m 初始距离下 AEB 仿真测试结果 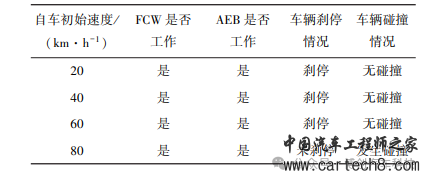 由表 1~表 3 中数据可以得到,在 3 组试验中,自车 AEB 功能均能按照预设的逻辑正常触发;前两组的初始距离设定下,自车均可以在发生碰撞之前刹停 车 辆, 实 现 避 撞;第 三 组 试 验 的 20 km / h、40 km / h和 60 km / h 情况下,车辆也可以正常避撞;但是在 80 km / h 的情况下,仿真表明车辆此时发生了碰撞。 4 结束语 本文构建了一种自动紧急避撞算法,在 80 km /h 以下的车速表现良好,可以较好地完成纵向避撞功能。本文对该算法的具体实现进行理论分析以及模型搭建介绍,对于算法的逻辑做了较为清楚的解释和说明。 参考文献 [1] 张立广,谭宝成,马天力. 无人驾驶车辆路径跟踪控制器的设计及实现[J]. 西安工业大学学报, 2013(8):680-684.[2] 郭应时,蒋拯民,白艳. 无人驾驶汽车路径跟踪控制方法拟人程度研究[J]. 中国公路学报, 2018,31(8):189-196. [3] 武星,楼佩煌. 基于运动预测的路径跟踪最优控制研究[ J]. 控制与决策, 2009, 24(4):565-569. [4] 倪兰青,林棻,王凯正. 基于预瞄的智能车辆路径跟踪控制研究[J]. 重庆理工大学学报(自然科学版), 2017,31(3):27-33. [5] LI T, HU J, GAO L, et al. Agricultural machine path trackingmethod based on fuzzy adaptive pure pursuit model [ J ].Transactions of the Chinese Society for Agricultural Machinery,2013, 44(1):205-210. [6] THRUN S, MONTEMERLO M, DAHLKAMP H. Stanley:Therobot that won the DARPA grand challenge[ J]. Journal of FieldRobotics, 2006, 23(9):661-692. |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论