电驱动两挡AMT新型动力系统参数匹配与研究
目前,电动汽车技术作为缓解能源危机的关键技术之一,已逐步成为汽车工业技术与产品发展的主流趋势,近几年得到迅速发展。
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
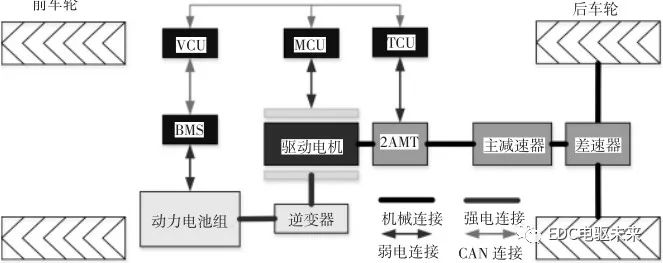
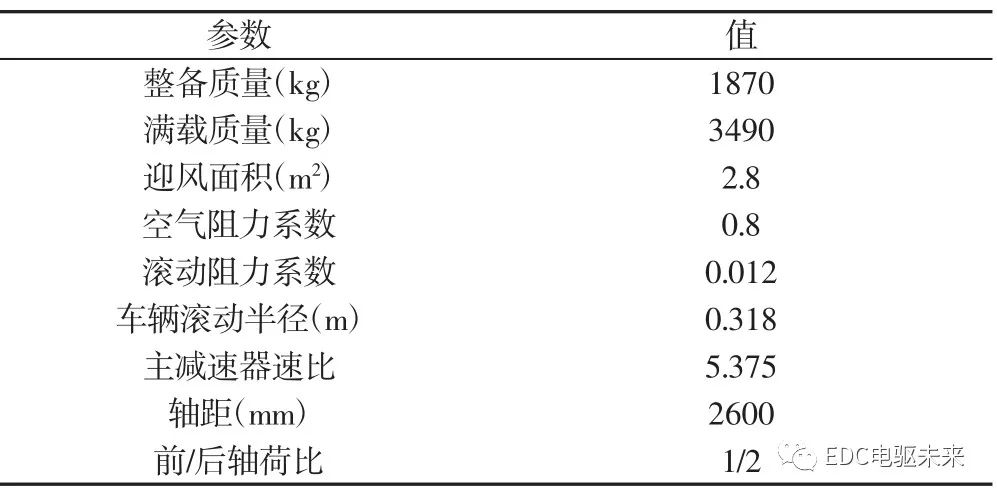
1 引言 目前,电动汽车技术作为缓解能源危机的关键技术之一,已逐步成为汽车工业技术与产品发展的主流趋势,近几年得到迅速发展。尽管动力电池技术有了长足的进步,但功率和能量密度仍然较低,因此,续驶里程问题仍是限制电动汽车发展的最主要问题[1-3]。目前,提升电动车性能的研究通常集中于电池、能量管理和驱动控制策略上[4],在动力系统结构方面很少涉及。目前大多数电动车动力系统采用驱动电机+单级减速器的结构,这种结构简单,但主减速器速比对电动汽车的性能好坏影响很大,无法同时兼顾最高车速与起步加速的性能要求。因此为了达到设计要求,不得不提高驱动电机的峰值扭矩和最高转速,这使得驱动电机功率增加。但选择功率较大电机,在日常行驶过程中,驱动电机经常工作在低效率区域,降低了整车经济性,使得驱动电机成本增加。 采用驱动电机+2AMT动力系统,2AMT工作在Ⅰ挡进行爬坡和加速时,可降低对驱动电机的扭矩需求,工作在Ⅱ挡时,可满足最高车速要求,同时满足了最高车速与起步加速的性能要求,两档变速比固定速比具有更低的能量消耗[5-6]。针对电动车用驱动电机+2AMT新型动力系统开发,充分借鉴基于遗传算法对电动汽车集成式驱动系统进行动力总成参数的优化技术[7-9],以电机的转矩、功率、电压的运动特性方程和平衡方程为基础建立电机模型[10]。首先根据整车参数和设计指标,确定动力系统中驱动电机、2AMT系统及动力电池系统等关键部件的参数,其次,根据所选部件在MATLAB/Simulink系统中搭建整车前向仿真模型对整车性能进行验证。 2 电驱动两挡AMT系统构成 搭载2AMT的新型动力传动系统简图,如图1所示。其系统构成主要包括:动力电池、驱动电机、2AMT、传动轴、主减速器、差速器以及与车轮相连的半轴组成。相比于采用单主减速器,该传动系统在驱动电机和主减速器之间加入一2AMT。低速或爬坡行驶时,2AMT工作在Ⅰ挡;高速行驶时,2AMT工作在Ⅱ挡。引入2AMT后,2AMT工作在不同档位,对驱动电机的扭矩需求和转速需求不同,同时影响着动力电池的放电效率,因此需要对动力系统各部件参数进行重新匹配与选型。首先针对某款微型电动车进行电驱动2AMT动力系统设计,确定驱动电机基本参数、2AMT速比及动力电池系统基本参数。所研究的电动车整车基本参数,如表1所示。整车设计性能指标主要包括动力性能指标和续驶里程设计指标,所制定的整车性能指标,如表2所示。
图1 电驱动2AMT系统简图 Fig.1 Schematic Diagram of Power Driven 2AMT System 表1 整车基本参数 Tab.1 Basic Parameters of the Vehicle
表2 整车性能设计指标 Tab.2 Performance Design Index of Vehicle
3 电驱动两挡AMT系统参数匹配3.1 驱动电机参数匹配与选型 驱动电机作为微型电动车唯一动力来源决定着整车动力性能和经济性能。在进行参数匹配时,首选确定驱动电机的基本参数。在驱动电机参数匹配时,首先进行功率匹配确定驱动电机峰值功率和额定功率,其次,根据确定的功率范围确定驱动电机的最高转速、基速和峰值转矩等参数。驱动电机峰值功率主要用来满足最高车速、最大爬坡度和加速时间的要求。首先,电动车以最高车速行驶过程中,由功率平衡方式可知所需要的驱动电机功率为:
其次,满载情况下,以爬坡速度匀速爬坡时,所需要的驱动
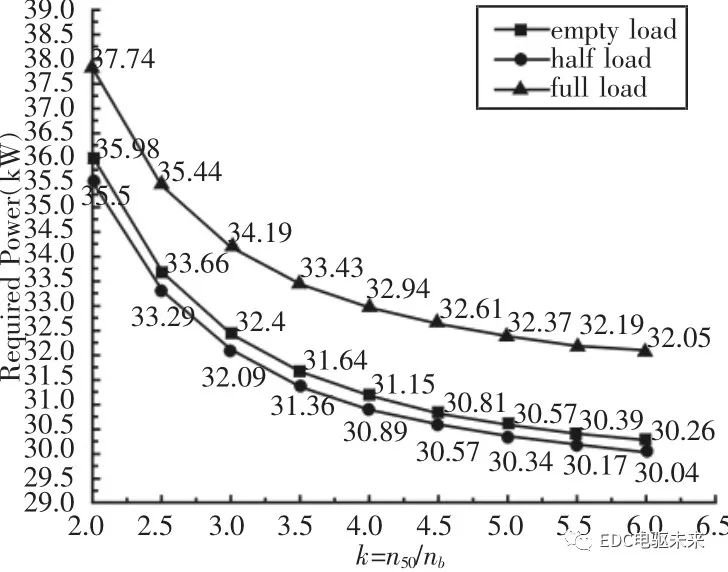
根据驱动电机外特性曲线以及车速经验公式,在电动车(0~50)km/h加速过程中,所需驱动电机功率为:
式中:v—微型电动货车行驶速度(km/h);m—整车质量(kg);f—滚动阻力系数;CD—空气阻力系数;A—迎风面积(m2);α—道路坡度;δ—整车质量旋转质量换算系数,此处取1.05;vb—驱动电机基速 nb时对应的车速(m/s);vf—加速末端车速(m/s);ρa—空气密度,取 1.2258N·s2·m-4。 为缩小加速时间,在进行(0~50)km/h加速性能试验时,规定2AMT不进行换挡。定义比值k为车速为50km/h对应的驱动电机转速n50与基速nb之比。针对不同装载情况,分别取k=[2:0.5:6]在满足加速性能要求下,所求得的驱动电机峰值功率曲线,如图2所示。
图2 不同装载情况下驱动电机需求功率随变化图 Fig.2 The Graph of the Needed Power of Driving Motor in Different Loading Varing with k 考虑最恶劣情况,在满足动力性能要求下,带入数据求得,驱动电机峰值功率取值为:
为保证额定功率下,驱动电机可以长时间运行,常以常用车速和最高设计车速的90%匀速行驶工况来确定驱动电机额定功率范围。在水平道路上,以常用车速55km/h行驶时,所需驱动电
在水平道路上,当微型电动货车以最高车速的90%进行匀速行驶时,所需驱动电机功率为:
带入数据,求得驱动电机功率取值范围为:
在确定完驱动电机功率范围后,需要确定驱动电机的最高转速n max和基速nb。由于本微型电动货车的最高设计车速为80km/h,同时为降低生产成本,选用异步电机作为驱动电机,故初步选取驱动电机的最高转速为6000r/m。即:n max=6000r/min(8) 在驱动电机特性参数中,基速比x(最高转速n max与基速nb的比值)越大,在电机功率一定的情况下,所能提供的最大转矩越大,针对异步电机,基速比x的取值范围为(2~4),则驱动电机的基速 nb的取值范围为:nb=1500~3000r/min (9) 确定驱动电机的基速范围后,则驱动电机最大转矩输出为:
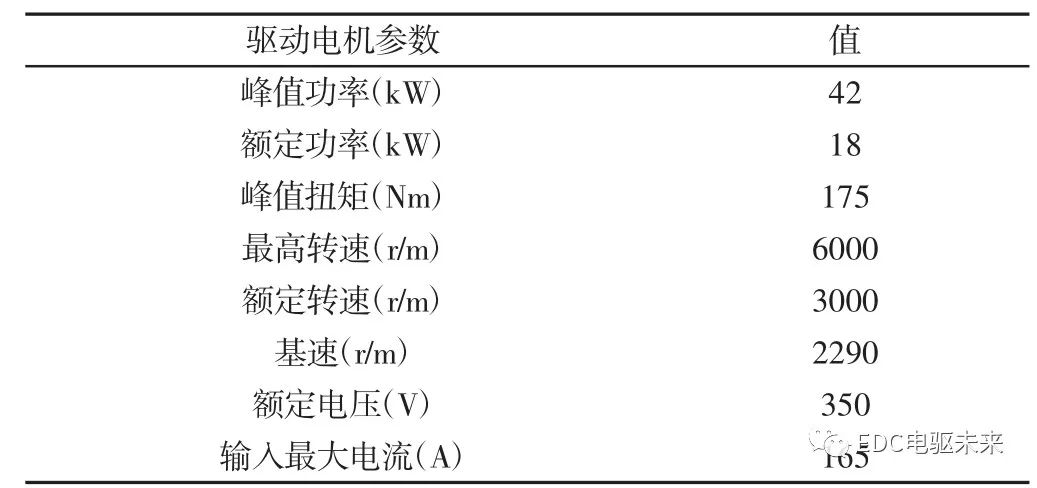
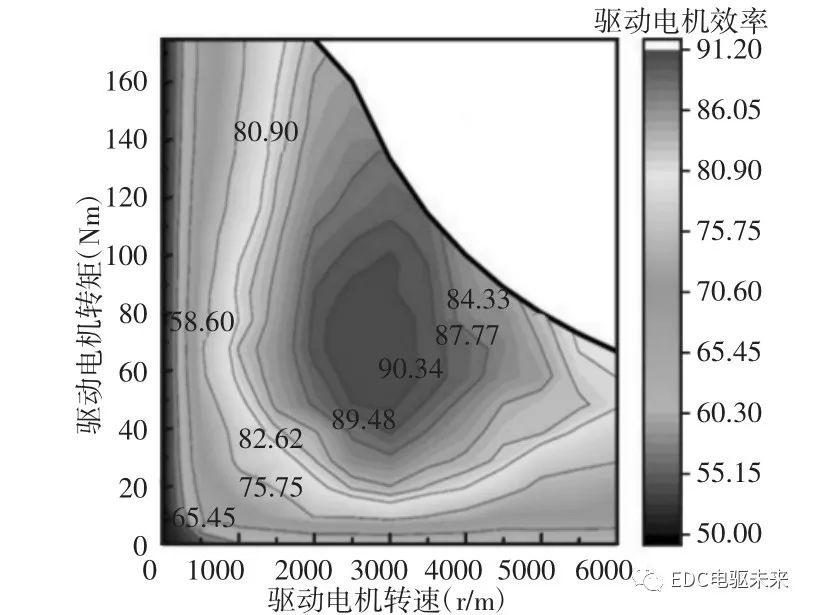
综上所述,选取某电机公司生产的一款异步电机作为驱动电机。该电机基本参数,如表3所示。该驱动电机的最大功率为42kW,满足峰值功率要求的同时具有一定的储备功率。其额定功率为18kW,符合额定功率取值范围;同时该驱动电机最大输出转矩为175Nm,最大输入电流可达165A,具有很好的过载能力。该驱动电机效率MAP图,如图3所示。 表3 驱动电机基本参数 Tab.3 Basic Parameters of Drive Motor
图3 驱动电机效率MAP Fig.3 Efficiency MAP of Drive Motor 3.2 两挡AMT传动比设计 在驱动电机参数已知情况下,微型电动货车用2AMTⅠ挡和Ⅱ挡的传动比设计原则为:(1)Ⅰ挡的选择主要是用来满足低速爬坡行驶要求;(2)Ⅱ挡的选取主要使驱动电机在常用车速行驶时工作在高效区域。 3.2 .1两挡AMT的Ⅰ挡传动比设计 电动货车在满载质量下,当以爬坡车速vi通过最大坡度i max时,两挡AMTⅠ挡速比取值范围为[4]:
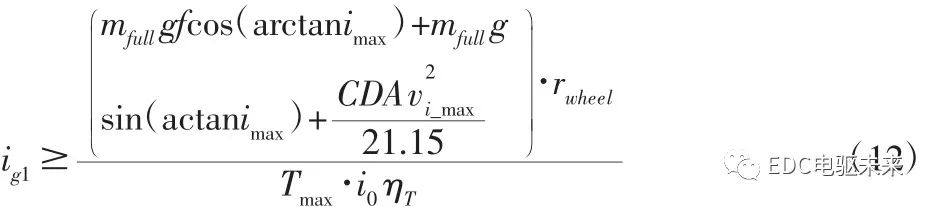
同时,由于电动货车的最大驱动力需满足地面附着条件的限制要求,2AMTⅠ挡传动比ig1取值不能无限增大。空载情况下,2AMTⅠ挡传动比需满足[4]:
式中:φ—附着系数;φ—后轴载荷比。 由于在进行(0~50)km/h加速试验时,两挡AMT始终处于Ⅰ挡,为避免驱动电机转速超出最大转速,Ⅰ挡传动比ig1满足:
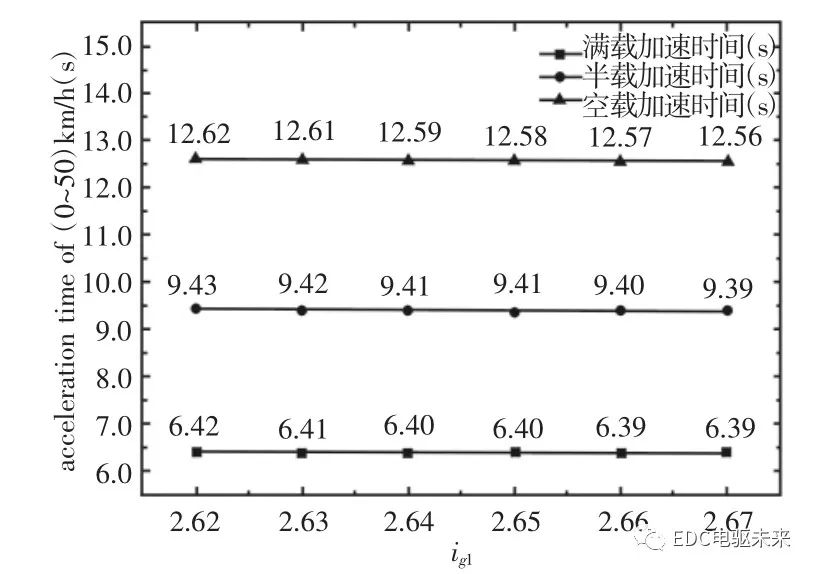
带入数据求得两挡AMT的Ⅰ挡速比取值范围为: 在确定2AMTⅠ挡传动比范围后,根据整车纵向动力学方程,采用数值方法求解空载,半载,满载情况下,不同Ⅰ挡传动比ig1时的(0~50)km/h加速时间,如图 4所示。
图4 不同装载情况下(0~50)km/h加速时间随Ⅰ挡传动比变化曲 Fig.4 The Graph of Acceleration Time from(0~50)km/h in Different Loading Varing with Transmission Ratio ofⅠGear 由图4可知,在Ⅰ挡传动比允许范围内,不同装载情况下,电动车均能满足(0~50)km/h加速性能要求。为了保护电机,选取在驱动电机转速为5900r/m时达到车速50km/h,此时Ⅰ挡传动比 3.2.2两挡AMT的Ⅱ挡传动比设计 2AMTⅡ挡传动设计的主要原则为:(1)满足最高车速设计要求;(2)使驱动电机高效区域覆盖尽可能多的车速范围;(3)满足换挡前后动力输出连续性,两挡传动比差值不能太大。 首先,设计的两挡AMTⅡ挡传动比ig2应满足最高车速设计要求,由公式得:
同时,在电动货车满载以最高车速行驶时,驱动电机输出的转矩应能克服此时行驶阻力矩。即:
由于驱动电机高效工作区域设计在额定转速,在设计2AMTⅡ挡速比ig2时,由驱动电机效率MAP图可知,驱动电机的高效区域为(2000~4200)r/m。考虑电动货车常用车速为50km/h,且在城市工况下,车速大多低于70km/h,为使驱动电机在该高效率区域转速范围内,电动货车车速能够达到70km/h,Ⅱ挡传动比需满足:
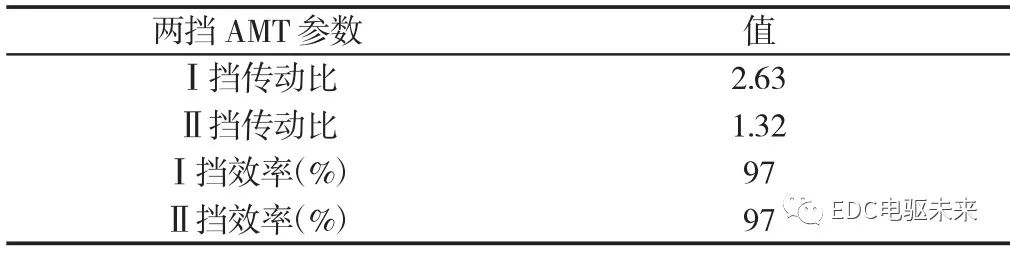
为满足换挡前后动力的连续性,应使Ⅰ挡和Ⅱ挡的动力输出曲线有一定的重叠区域。此时,Ⅰ挡与Ⅱ挡比值ig1/ig2应小于基速比x=2.62。 根据以上公式,带入数据求得2AMTⅡ挡传动比ig2的取值 为使得在Ⅱ挡情况下,驱动电机高效区域能够覆盖较多的 综上所述,所设计的2AMT基本参数,如表4所示。实物如图5所示。 表4 2AMT基本参数 Tab.4 Basic Parameters of AMT
图5 2AMT实物图 Fig.5 2AMT Actual Object 4 整车前向仿真模型及性能仿真 在确定驱动电机、2AMT和动力电池参数后,建立整车前向仿真模型以验证是否满足设计指标。本研究针对该电驱动2AMT动力系统,根据所匹配得到的动力系统各关键基本参数,在Matlab/Simulink环境中搭建前向整车仿真模型,如图6所示。整车模型主要由工况输入模型、驾驶员模型、控制系统模型、动力电池模型、驱动电机模型、2AMT系统模型、主减速器模型及车轮及整车模型和电气附件模型组成。
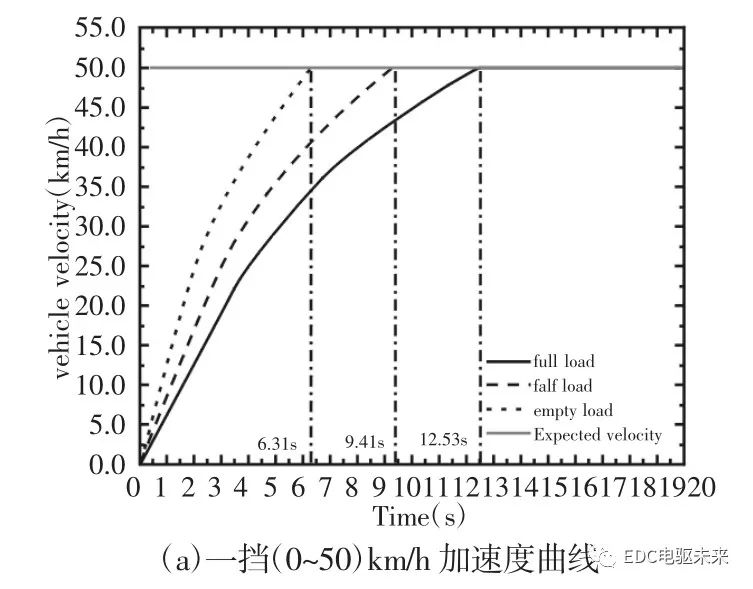
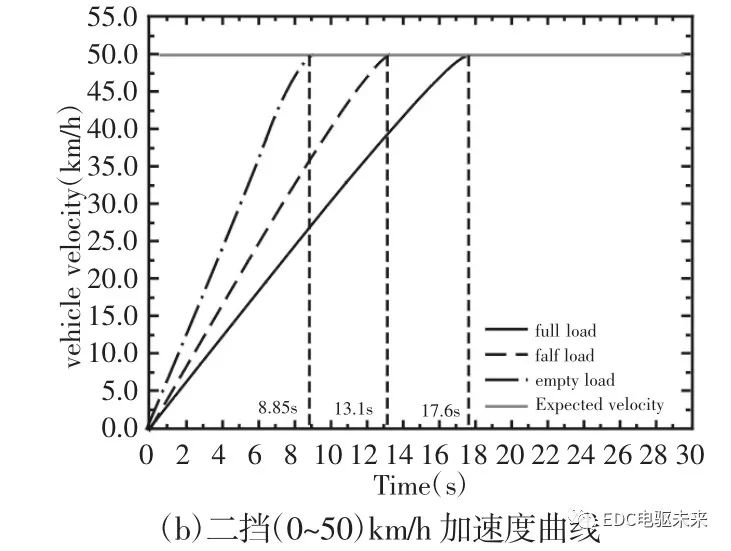
图6 电动车整车仿真模型示意图 Fig.6 Schematic Diagram of the Vehicle Simulation Model 4.1 整车动力性验证 4.1.1 (0~50)km/h加速性能分析 当加速踏板开度为1时,对电动车不同负载工况下,2AMT分别处于Ⅰ挡和Ⅱ挡时进行(0~50)km/h加速性能仿真,结果如图7、表5所示。在2AMT处于Ⅰ挡时,能够满足不同装载工况下(0~50)km/h的加速性能要求。对比分析可知,Ⅰ挡相对于Ⅱ挡,在空载、半载、满载情况下,其加速时间分别减少了2.54s、3.69s、5.07s,加速性能提高约30%左右。因此,相同驱动电机参数下,采用2AMT可有效提高加速性能。
图7 不同挡位下(0~50)km/h加速性能曲线 Fig.7 Acceleration Curve of(0~50)km/h in Different Baffle 表5 (0~50)km/h加速性能仿真时间 Tab.5 Acceleration Performance Simulation Time of(0~50)km/h
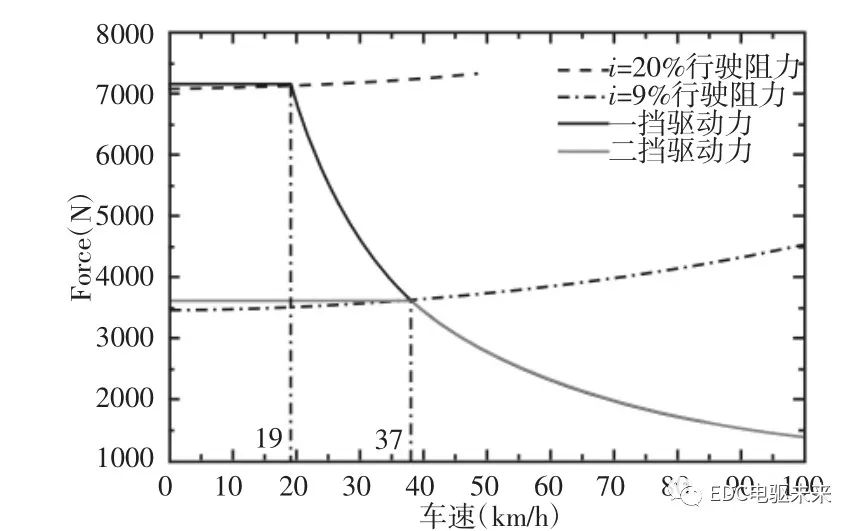
4.1.2最大爬坡度验证 对两挡AMT分别处于Ⅰ挡和Ⅱ挡时,最大爬坡度,如图8所示。Ⅰ挡时,当道路坡度为20%时,其阻力平衡点车速为19km/h,满足最大爬坡度测试要求;Ⅱ挡时,最大爬坡度约9%左右,无法满足20%的爬坡度要求。可见,Ⅰ挡相对于Ⅱ挡其爬坡性能显著提高。
图8 2AMT最大爬坡度测试 Fig.8 Test of Maximum Climbing of 2AMT 4.2 整车经济性能验证 由于等速测试车速为55km/h,两挡AMT处于Ⅱ挡位置,取动力电池放电深度为0.8。在常速情况下,电动车续驶里程为139km,满足了整车续驶里程设计要求。 5 结论 本研究针对电动车用两挡AMT新型动力系统,根据整车基本参数和性能设计指标,对驱动电机、2AMT系统、动力电池等关键基本部件参数进行匹配与选型。并在Matlab/Simulink环境中搭建整车仿真模型,通过仿真得到动力性能指标和续驶里程,验证所选参数的合理性。通过仿真发现,相对于采用单级主减速,采用电驱动2AMT动力系统,不但能够提升车辆的爬坡性能;而且能够有效降低对驱动电机转矩需求,使驱动电机较多的工作在高效区间,从而改善车辆的经济性。 |





文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共1条 发表评论发表我的评论