自动驾驶之高精度地图
生成高精地图的过程需要采集大量的数据,我们的采集途径包括:GNSS(全球导航卫星系统)、IMU(惯性测量单元)、轮速计、激光雷达点云以及摄像头图像。
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
生成高精地图的过程需要采集大量的数据,我们的采集途径包括:GNSS(全球导航卫星系统)、IMU(惯性测量单元)、轮速计、激光雷达点云以及摄像头图像。 1.什么是高精度地图 高精度地图,通俗来讲就是精度更高、数据维度更多的电子地图。精度更高体现在精确到厘米级别,数据维度更多体现在其包括了除道路信息之外的与交通相关的周围静态信息。 高精度地图将大量的行车辅助信息存储为结构化数据,这些信息可以分为两类。第一类是道路数据,比如车道线的位置、类型、宽度、坡度和曲率等车道信息。第二类是车道周边的固定对象信息,比如交通标志、交通信号灯等信息、车道限高、下水道口、障碍物及其他道路细节,还包括高架物体、防护栏、数目、道路边缘类型、路边地标等基础设施信息。
高精度道路导航地图应用分析 以上这些信息都有地理编码,导航系统可以准确定位地形、物体和道路轮廓,从而引导车辆行驶。其中最重要的是对路网精确的三维表征(厘米级精度),比如路面的几何结构、道路标示线的位置、周边道路环境的点云模型等。有了这些高精度的三维表征,自动驾驶系统可以通过比对车载的GPS、IMU、LiDAR或摄像头的数据精确确认自己当前的位置。另外,高精度地图中包含有丰富的语义信息,比如交通信号灯的位置和类型、道路标示线的类型、以及哪些路面是可以行使等。 2.高精度地图的特点
高精度道路导航地图和普通导航地图对比示意图 与一般电子导航地图相比,高精度地图不同之处在于: (1)精度:一般电子地图精度在米级别,商用GPS精度为5米。高精度地图的精度在厘米级别(Google、Here等高精度地图精度在10-20厘米级别)。 (2)数据维度:传统电子地图数据只记录道路级别的数据:道路形状、坡度、曲率、铺设、方向等。高精度地图(精确度厘米级别):不仅增加了车道属性相关(车道线类型、车道宽度等)数据,更有诸如高架物体、防护栏、树、道路边缘类型、路边地标等大量目标数据。高精度地图能够明确区分车道线类型、路边地标等细节。 (3)作用&功能:传统地图起的是辅助驾驶的导航功能,本质上与传统经验化的纸质地图是类似的。而高精度地图通过“高精度+高动态+多维度”数据,起的是为自动驾驶提供自变量和目标函数的功能。高精地图相比传统地图有更高的重要性。 (4)使用对象:普通的导航电子地图是面向驾驶员,供驾驶员使用的地图数据,而高精度地图是面向机器的供自动驾驶汽车使用的地图数据。 (5)数据的实时性:高精度地图对数据的实时性要求更高。根据博世在2007年提出的定义,无人驾驶时代所需的局部动态地图(Local Dynamic Map)根据更新频率划分可将所有数据划分为四类:永久静态数据(更新频率约为1个月),半永久静态数据(频率为1小时),半动态数据(频率为1分钟),动态数据(频率为1秒)。传统导航地图可能只需要前两者,而高精地图为了应对各类突发状况,保证自动驾驶的安全实现需要更多的半动态数据以及动态数据,这大大提升了对数据实时性的要求。 高精度地图=高鲜度+高精度+高丰富度。不论是动态化,还是精度和丰富度,最终目的都是为了保证自动驾驶的安全与高效率。动态化保证了自动驾驶能够及时地应对突发状况,选择最优的路径行驶。高精度确保了机器自动行驶的可行性,保证了自动驾驶的顺利实现。高丰富度与机器的更多逻辑规则相结合,进一步提升了自动驾驶的安全性。 3.高精度地图的分类 导航地图&ADAS地图&无人驾驶地图 导航地图、ADAS地图和AD所需要的地图各不相同。 (1)对于导航地图而言,街道名称是比较重要的信息,但对于ADAS和AD地图确并非如此。 (2)道路曲率对于ADAS应用至关重要,对于自动驾驶也是必需的,但导航地图并不需要道路曲率数据。 (3)道路的几何特征对于导航、ADAS和AD地图都是适用的。 (4)不同地图级别和地图精度的背后是不同级别的智能驾驶以及不同级别的精度需求。
高精地图与导航地图的关联关系 不同级别的高精度地图,在精度和信息量上也有差别。例如,在安全环境下使用的基础ADAS地图只需要精度达到米量级,而HAD级别高精度地图的精度则能达到厘米量级。在数据量方面,基础ADAS地图只记录高精道路级别的数据(道路形状、坡度、曲率、铺设、方向等),HAD级别地图不仅增加了车道属性相关(车道线类型、车道宽度等)数据,更有诸如高架物体、防护栏、树、道路边缘类型、路边地标等大量目标数据。 4.在无人驾驶中的应用 作为无人驾驶的记忆系统,未来的高精度地图将具备三大功能。
(1)地图匹配。由于存在各种定位误差,电子地图坐标上的移动车辆与周围地物并不能保持正确的位置关系。利用高精度地图匹配则可以将车辆位置精准的定位在车道上,从而提高车辆定位的精度。 高精度地图在地图匹配上更多的依靠其先验信息。传统地图的匹配依赖于GPS定位,定位准确性取决于GPS的精度、信号强弱以及定位传感器的误差。高精地图相对于传统地图有着更多维度的数据,比如道路形状、坡度、曲率、航向、横坡角等。通过更高维数的数据结合高效率的匹配算法,高精度地图能够实现更高尺度的定位与匹配。 (2)辅助环境感知。对传感器无法探测的部分进行补充,进行实时状况的监测及外部信息的反馈 :传感器作为无人驾驶的眼睛,有其局限所在,如易受恶劣天气的影响,此时可以使用高精度地图来获取当前位置精准的交通状况。 原理:1)通过对高精度地图模型的提取,可以将车辆位置周边的道路、交通、基础设施等对象及对象之间的关系提取出来,这可以提高车辆对周围环境的鉴别能力。2)一般的地图会过滤掉车辆、行人等活动障碍物,如果无人驾驶车载行驶过程中发现了当前高精度地图中没有的物体,这些物体大概率是车辆、行人和障碍物。 高精度地图可以看做是无人驾驶的传感器,相比传统硬件传感器(雷达、激光雷达或摄像头),在检测静态物体方面,高精度地图具有的优势包括: 所有方向都可以实现无限广的范围。 不受环境、障碍或者干扰的影响。 可以“检测”所有的静态及半静态的物体。 不占用过多的处理能力。 已存有检测到的物体的逻辑,包括复杂的关系。 (3)路径规划。对于提前规划好的最优路径,由于实时更新的交通信息,最优路径可能也在随时会发生变化。此时高精度地图在云计算的辅助下,能有效地为无人车提供最新的路况,帮助无人车重新制定最优路径。 高精度地图的规划能力下沉到了道路和车道级别。传统的导航地图的路径规划功能往往基于最短路算法,结合路况为驾驶员给出最快捷/短的路径。但高精地图的路径规划是为机器服务的。机器无法完成联想、解读等步骤,给出的路径规划必须是机器能够理解的。在这种意义上,传统的特征地图难以胜任,相对来说高精度矢量地图才能够完成这一点。矢量地图是在特征地图的基础之上进一步抽象、处理和标注,抽出路网信息、道路属性信息、道路几何信息以及标识物等抽象信息的地图。它的容量要小于特征地图,并能够通过路网信息完成点到点的精确路径规划,这是高精度地图使能的一大路径。 5.高精度地图产业 由于高精地图是链接人、车、路等各种交通参与者的纽带,车企、Tier1、地图厂商、初创公司、互联网企业、芯片厂商等围绕高精地图开展了各种各样的合作,共同推进高精地图产业的发展。 高精度地图采集测绘数据的方式,全球主要有两大技术路线。一种以谷歌、HERE的地图测绘车为代表。例如,HERE高精度测绘车上的激光雷达传感器可以一秒内感知约60万个扫描点(包括周边建筑物、树木等);在一天内,测绘车能够收集和处理超过100G的数据。另一种则以特斯拉的“车队学习网络”(Fleet Learning Network)为代表,相当于利用量产车,把测绘任务“众包”出去,调动整个车队的所有传感器来收集数据,并通过云技术上传到中央数据库,最终每一辆车都是地图数据贡献者,也是获得者。该方法弥补了由于测绘车数量不足,而造成的数据实时更新缓慢的缺点。
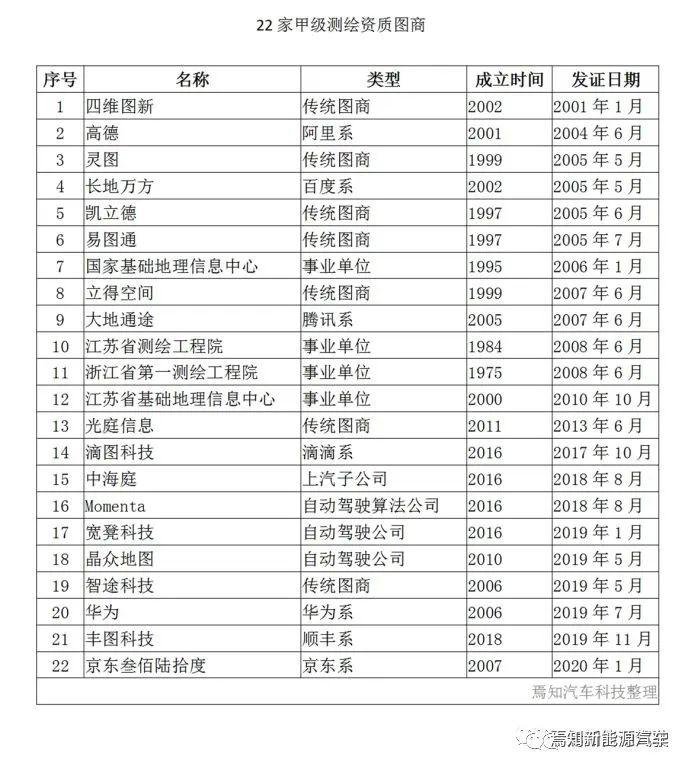
2015年,奥迪、宝马、Daimler 联合起来斥资31亿美元购买诺基亚 Here 地图,为研发高精度道路导航地图做准备。2011年宝马的 国外的高精地图主要有Here、TomTom、Waymo(原Google地图)等老牌图商,其中Waymo的高精地图目前仅用于自己的无人车披露信息非常少。此外因为美国的地图测绘政策限制较少,因此成为高精地图创业者的天堂,比较有名的初创公司DeepMap、CivilMaps、lvl5、Carmera。初创企业往往有一个自己主打的算法技术,比如CivilMaps能将1T的激光雷达点云数据压缩到8MB,Carmera融合摄像头和激光雷达的图像获得更好的传感效果等。但是云端的存储、运算、通信能力是初创企业普遍的短板。另外Uber、通用Cruise等也都在布局高精地图。 和美国不同,国内市场因为有较为严格的地图测绘政策限制,目前拥有“导航电子地图资质单位名单”的企业有22家。。国内的地图行业呈现三足鼎立的状况,百度地图、高德(阿里)、四维图新(腾讯),其背后是互联网巨头对地图入口的争夺。 |





文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共1条 发表评论发表我的评论