模糊控制在汽车离合器中的应用
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
首先根据采集到的油门踏板位移值及其变化率,将它们分别模糊量化。模糊量化就是将精确的数字量转换为模糊量,即将输入的精确量转变成为与之 相应的隶属函数。隶属函数有钟形,梯形,三角形等形状,一般认为钟形最好,但难于计算;三角形次之,最后是梯形。在这里,为了计算方便,选用的是三角形隶属函数。油门踏板位移及其变化率的隶属函数如图3、图4所示。
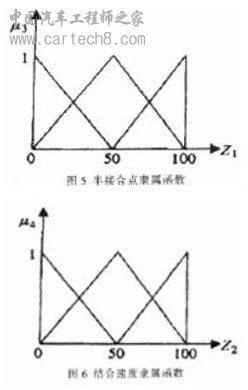
μ1为油门踏板位移隶属度,μ2为油门踏板位移变化率的隶属度;X为油门踏板位移值的大小,Y为油门踏板位移变化率的大小。X和Y均取为从0~100之间变化是为了计算隶属度时方便。具体计算模糊控制输出时再将它们换算成为实际值。再将输出参数进行模糊化处理,如图5、图6所示。
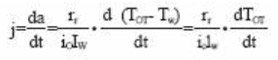
其中μ3为半接合点隶属度,μ4为结合速度隶属度;Z1为半接合点的值,Z2为结合速度的值。同样道理,为了计算隶属度的方便,半接合点的值和结合速度的值都先取从0~100之间变化,具体计算最后输出时再换算过来。 然后建立起一系列模糊推理规则。这里有2个输入参数,各种不同输入参数的组合将得到不同的输出。模糊推理规则是依据离合器的寿命目标函数和优秀驾驶员的经验来确定的。 在离合器的整个接合过程中,应该做到接合平顺、柔和,同时应该减少滑磨功,使磨损尽可能小,延长离合器的使用寿命。这是对离合器使用性能提出 的要求。为了评价这两个要求,可以分别建立他们的目标函数。 (a)接合平顺性目标函数。对接合平顺性影响最大的是离合器接合时引起的传动系扭矩波动,所以,可把车身的纵向加速的变化率,即冲击度j作为评价指标。
式中:TOT—变速器输出轴转矩 io—变速器输出轴至驱动轮传动比 IW—与变速器输出轴相连的惯量 rr—驱动轮半径 j与离合器接合扭矩的导数成正比,波动值dTot/dt越大,j也越大,j能较好地反映离合器接合过程的动力学本质。因为主要研究的是怎样使车辆自适应驾驶员的意图起步,有时为了快速起步而不得不以牺牲冲击度为代价,所以考虑更多的是离合器的寿命目标函数。 (b)离合器寿命目标函数:离合器寿命目标函数是这样定义的:离合器在接合过程中,主要元件与从动元件一直经历由转速不等到转速一致的滑磨过程,离合器频繁的接合和滑磨,使摩擦片很容易磨损,滑磨产生的热量使压盘和飞轮元件温度升高,加剧摩擦片的磨损,降低离合器的使用寿命。因此可以滑磨功来评价离合器的使用寿命。离合器接合过程中,希望滑磨功越小越好,故目标函数为: 式中:Tc—离合器摩擦力矩 We、Wn—发动机、离合器从动轴角速度 W—滑磨功 从上式中可以看到,当离合器摩擦力矩一定时,滑磨时间越长,滑磨功越大。所以从控制滑磨功大小,防止滑磨功过大的方面考虑,在阻力较大的路面上起步时必须限制滑磨时间。另一方面,油门踏板位移较大和油门踏板位移变化率较大时除了可能是路面阻力较大外,也有可能是驾驶员希望快速起步,尽管此时冲击比较大,这时对离合器的结合要求也是希望快速结合。 依此类推,从考虑到离合器的寿命和依据驾驶员的经验可以得出一组模糊推理规则,从而建立一个模糊推理规则表。 具体的参数输入后,通过模糊推理规则表的处理以及运用Mamdani模糊推理方法,得出模糊的输出结果。 模糊推理完成后进行的模糊计算的最后一步:反模糊化处理,这里使用的是重心法。经过批模糊化处理后得到模糊控制输出参数的精确值,精确值可以用来控制离合器的结合过程。 模糊控制用于车辆起步离合器的控制是非常有效的,它能够解决车辆系统难以建立数学模型和难以精确控制的问题,它的控制效果是令人满意的。 三、结束语 模糊控制理论的产生和发展,不是控制理论从确定思维的倒退,而是螺旋式的前进;不是用精确性完全取代模糊性,而是承认精确性向模糊性的逼近,是模糊思维在控制理论领域的重现。 它是沟通人类模糊化自然思维和机械的精确思维之间的科学桥梁,它为我们解决巨人系统、人—机系统和人工智能等问题提供了有效的工具和手段。 |


文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论