基于模糊PD控制的电动助力转向系统建模及仿真分析
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
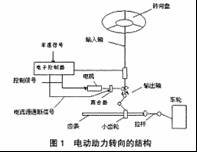
电动助力转向系统其本身是一个比较复杂的非线性随动系统,这就决定了获取系统精确的数学模型的有很大困难。另外系统本身受到诸如车速、扭矩测量装置精度与灵敏度、路况等因素产生的系统扰动等变数的影响,事实上对系统对精确度要求不是非常高,而对系统的实时性要求比较高。而糊控制器不依赖系统的精确数学模型,对系统参数变化不很敏感,具有很强的鲁棒性和控制稳定性。很适合汽车这一类快速动态统。 针对转向系统的“轻”与“灵”的矛盾(车转向系统的转向轻便性与路感相互制约的现象)提出一种能获得理想助力特性的策略,并根据此策略确定了一种双模糊表的模糊自调整PD控制器。很好地解决了“轻”与“灵”的矛盾,并在提高轻便性的同时保证驾驶员可以获得充分的路感。 1 电动助力转向的工作原理 驾驶员根据路感操纵方向盘时,扭矩传感器将检测输入扭矩的大小和方向信号传给控制器,控制器根据扭矩传感器信号确定助力扭矩的大小和方向,即通过调整直流电动机的电枢电压控制电枢电流,从而调整转向助力的大小和方向。同时控制器还根据不同车速调整助力大小。车速越低助力越大,车速越大助力越小。当车速大于一定值时,取消助力,将直流电动机反接制动,使汽车高速行驶时方向感沉稳,行驶安全。
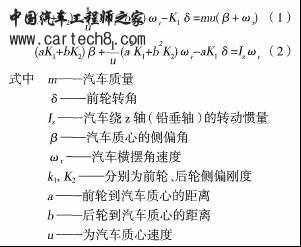
2 电动助力转向的数学模 2.1 汽车2自由度转向模型 将汽车简化为一个具有侧向和横摆运动的2自由度的汽车模型,当其侧偏角很小(小于5°)时,其运动微分方程。
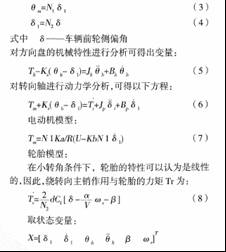
2.2 EPS的模型 EPS的控制目标是改善汽车操纵的轻便和转向的灵活性,评价汽车转向系统的轻便性可以从方向盘操纵力和方向盘把持力两个不同的角度来考虑,本文从方向盘操纵力角度研究转向系统的轻便性。本文选取汽车横摆速度ωr评价转向的灵活性。 2.2.1 转向系统动力学方程 为分析问题方便,把前轮和转向机构向轴简化。从电动机到转向轴的传动比为N1,而从转向轴到前轮的传动比为N2,故有:
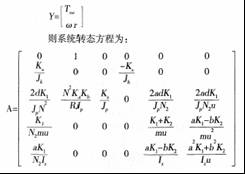
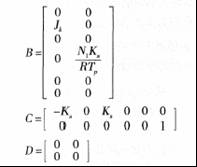
输人变量:U=[Th u] 系统的状态方程:X=AX+BU(9) 系统的输出方程:Y=CX+DU(10) 由于EPS的控制目标是改善汽车操纵的轻便和转向的灵活性,所以选取汽车横摆速度ωr和传感器测量Tsw,其中(Tsw= Ks(θh- δ1,)作为输出:
3.1 模糊控制原理 针对EPS设计了一种模糊自调整控制方案,具体方案如图2所示。它由一个模糊自调整机构和一个PD控制器组成,模糊自调整机构根据输入信号(即传感器测得扭矩
在常规的模糊控制控制器中,量化因子 下一页 >> |
 的大小、方向以及变化的趋势等特征)决定使用两个模糊表中的哪个,根据这一模糊表进行模糊推理作出相应决策,在线整定PD参数Kp,Kd,在线调整PD参数Kp、Kd,以期获得满意的控制效果。
的大小、方向以及变化的趋势等特征)决定使用两个模糊表中的哪个,根据这一模糊表进行模糊推理作出相应决策,在线整定PD参数Kp,Kd,在线调整PD参数Kp、Kd,以期获得满意的控制效果。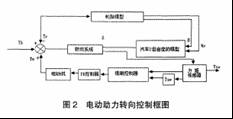
 和比例因子Ku是固定的。考虑在实际电动助力转向系统中,当参数发生变化或受到随机干扰影响时,常规模糊控制器将无法适应控制环境的变化,为保证有较好的转向灵敏性和操纵稳定性,采用参数自整定模糊控制器,即在常规模糊控制器的基础上选择适当的调整算法在线整定
和比例因子Ku是固定的。考虑在实际电动助力转向系统中,当参数发生变化或受到随机干扰影响时,常规模糊控制器将无法适应控制环境的变化,为保证有较好的转向灵敏性和操纵稳定性,采用参数自整定模糊控制器,即在常规模糊控制器的基础上选择适当的调整算法在线整定  ,以使系统性能达到预定要求。
,以使系统性能达到预定要求。文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论