【干货】解读宝马的自适应巡航功能和实现结构
作者:朱玉龙 笔者最近在收集一些测试ACC(自适应巡航)和FSRA(全速度范围自适应巡航)的结果,因为实际车上使用情况有变迁,所以先需要拿2-3家的产品历史变迁和解决方案来探究一下,
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
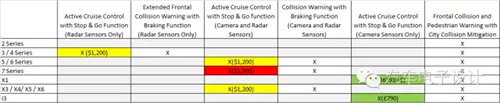
笔者最近在收集一些测试ACC(自适应巡航)和FSRA(全速度范围自适应巡航)的结果,因为实际车上使用情况有变迁,所以先需要拿2-3家的产品历史变迁和解决方案来探究一下,根据不同的宝马车型平台换代时间,及其发布给经销商的介绍资料可以发现,自适应巡航功能(ACC)大概有4代系统。本文主要是把ACC系统补充完毕。 1.纯雷达(Radar)版本ACC系统(1200美金) 2.低成本视觉ACC系统(600+美金) 3.Radar和视觉融合ACC系统(1200~1900美金) 首先还是从金钱上做个系统的比较
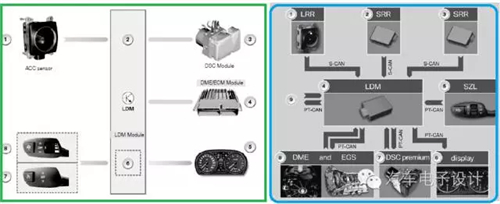
纯Radar版本ACC系统 这个系统标配是DCC,可以实现动态巡航,对于自适应巡航存在一些疑问的地方: F01/F02/F12能做ACC Stop go,需1短2长,后续两个短距离的Radar给视觉代替了,变成融合方法了;基于3系/4系的,以前是单77Ghz雷达的为主,第二代Active Cruise的平台。故而信息不是特别明朗。
低成本视觉ACC系统 低成本视觉ACC系统从原来的i3开始扩展的X1上,用的是单目的低成本方案,600美金可以做这个功能,里面涉及的内容模块化,下一步可以扩展到更多车型上面。
视觉用来鉴别车,还是非常清楚的,还可以跟车道线结合,在之前的ACC里面区分车辆好大的困难就容易解决。
Radar和视觉融合ACC系统 1.单目融合 这个是在5/6系和X系列车型上面,使用单目与Radar融合的产物。
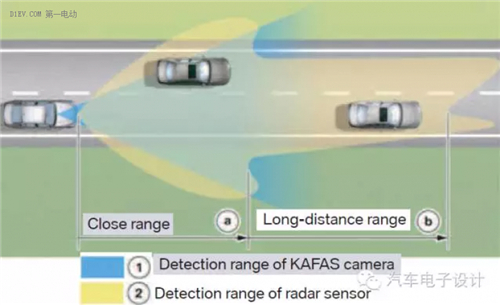
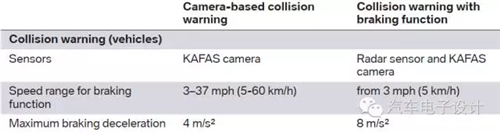
这里倒是罗列了有没有雷达的区别,主要体现在减速范围上,在这个功能里面,视觉起到的作用其实挺大的,可以很好的区分前方车辆的实际情况,距离控制本身还是以雷达为主。 备注:这里很难区分出视觉ACC和视觉+Radar ACC里面的性能区别。
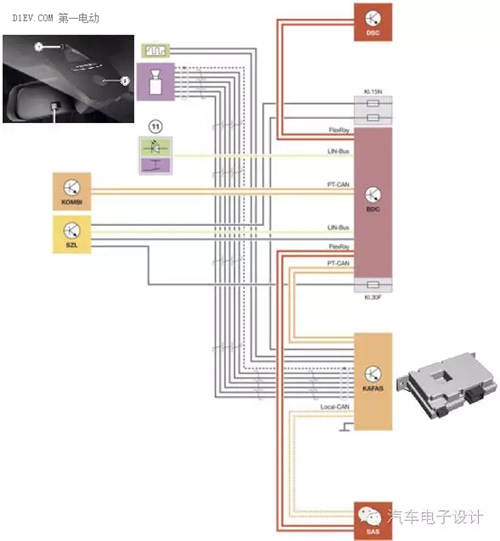
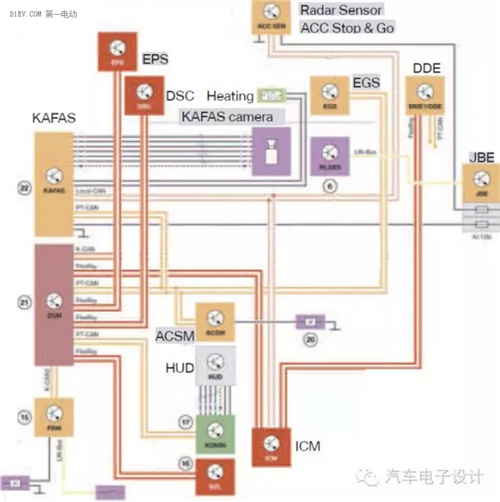
2.双目融合 由于双目的系统是镜头、处理器封装在一起,通过以太网与FRR的雷达还有SAS进行连接,主体的算法可以在不同情况下做不同的处理。 KAFAS双目通过车辆后部检测、提取道路信息、车辆位置 通过融合确定道路线、禁止车辆还有固定设施 这明确提出可以在多车道高速公路、普通公路以及城市主干道和环道上进行,检测物体里面也包含了摩托车。 1.单目融合 这个是在5/6系和X系列车型上面,使用单目与Radar融合的产物。
这里倒是罗列了有没有雷达的区别,主要体现在减速范围上,在这个功能里面,视觉起到的作用其实挺大的,可以很好的区分前方车辆的实际情况,距离控制本身还是以雷达为主。 备注:这里很难区分出视觉ACC和视觉+Radar ACC里面的性能区别。
2.双目融合 由于双目的系统是镜头、处理器封装在一起,通过以太网与FRR的雷达还有SAS进行连接,主体的算法可以在不同情况下做不同的处理。 KAFAS双目通过车辆后部检测、提取道路信息、车辆位置 通过融合确定道路线、禁止车辆还有固定设施 这明确提出可以在多车道高速公路、普通公路以及城市主干道和环道上进行,检测物体里面也包含了摩托车。 |

文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论