自动驾驶感知技术概览:盘一盘传感器、感知和仿真软件
自动驾驶感知技术概览:盘一盘传感器、感知和仿真软件
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
 智能汽车概述 1.1 汽车新四化 从工业1.0的机械化、2.0的电气化到3.0的机电一体化,汽车工业每次都发生重大变革;以CPS为标志的工业4.0时代,将使汽车在未来10~20年中发生革命性的变化。 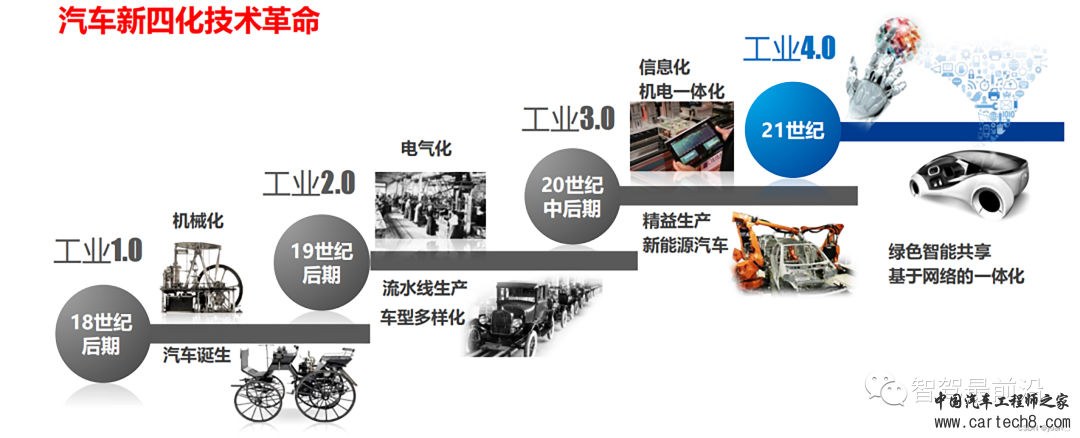 工业4.0时代,传统汽车产业正在迎来一场全新的技术变革,即 “新四化”:电动化(低碳化)、智能化、网联化及共享化,传统汽车企业面临新的机遇和挑战。 1.2 智能网联汽车 智能网联汽车(Intelligent & Connected Vehicles,简称“ICV””)是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与X(人、车、路、云端等)”智能信息交换、共享,具备复杂环境感知、智能决策、协同控制”等功能,可实现“安全、高效、舒适、节能””行驶,并最终可实现替代人来操作的新一代汽车。  1.3 SAE J3016自动驾驶分级标准 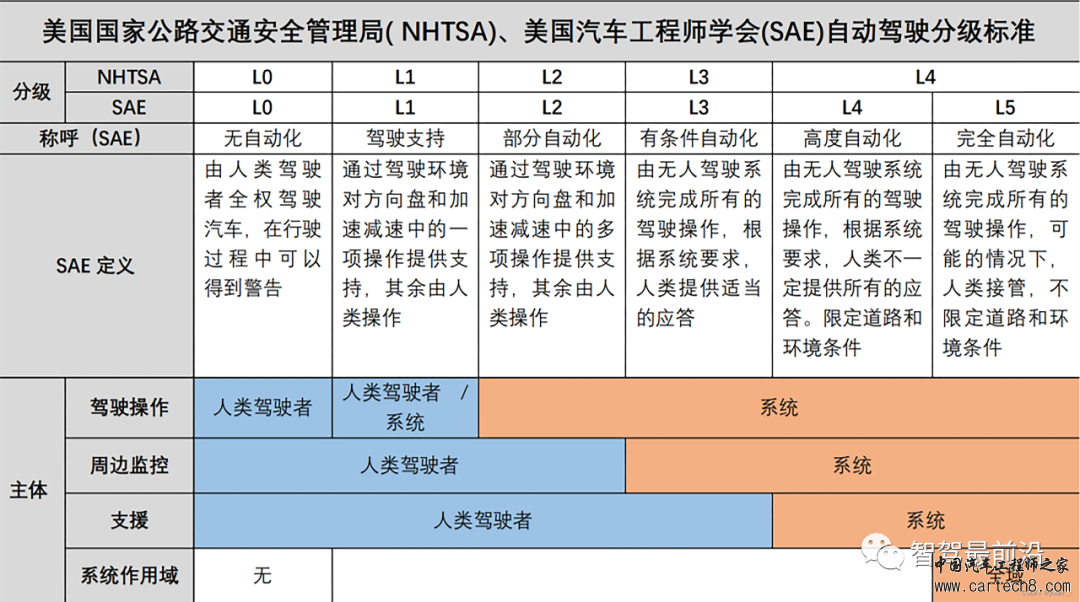 按照动态驾驶任务,监视和判断,失效应对几项任务由驾驶员还是自动化系统完成,以及自动化系统运行的典型工况,可以将自动驾驶汽车分为L0-L5级别。 三个主要参与者:驾驶员,驾驶自动化系统以及其他车辆系统和组件。 ? 动态驾驶任务 DDT (Dynamic driving task):指汽车在道路上行驶所需的所有实时操作和决策行为,动态驾驶任务又可以分为车辆控制,监视和判断两项任务 ? 车辆控制:包括通过方向盘来对车辆进行横向运动操作、通过加速和减速来控制车辆; ? 监视和判断 OEDR (Object and event detection and response):对车辆周围物体和事件检测感知、认知,对车辆周围环境的监测和执行对应判断。 ? 失效应对 (DDT Fallback) :当系统性的失效发生或者出现超过系统原有的运行设计范围之外的情况时,给出最小化风险的解决方法。 ? 典型工况 ODD (Operational Design Domain) 指自动驾驶系统被设计的起作用的条件及适用范围,包括天气环境、道路情况(直路、弯路的半径)、车速、车流量等条件。 PS1:L4级和L5级自动驾驶都是无人驾驶 。 PS2: 需要将多辆智能汽车传感器的感知数据通过车联网融合在一起,实现感知盲区消除,这样的智能车网联化等级应该满足至少L2级。  环境感知定义 2.1 智能网联汽车系统架构 环境感知、智能决策、控制执行是智能网联汽车的关键技术,下图为智能网联汽车“三横两纵”技术架构。 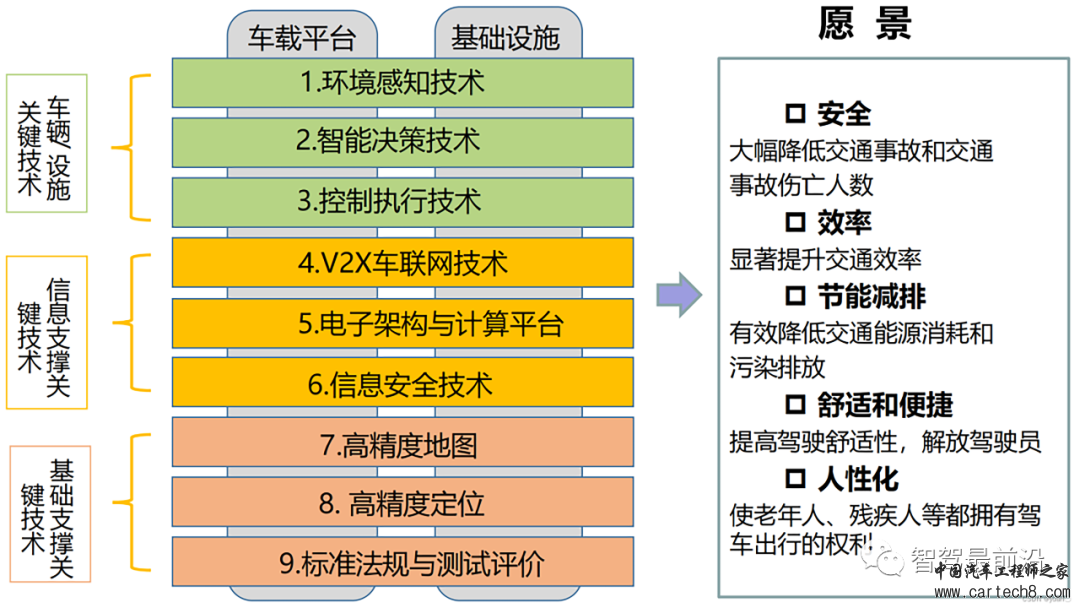 三横:车辆/设施关键技术(环境感知、智能决策、执行控制)、信息支撑关键技术(V2X车联网、电子架构与计算平台、信息安全)、基础支撑关键技术(高精度地图、高精度定位、标准法规与测试评价) 两纵:车载平台、基础设施 2.2 环境感知定义及对象 环境感知技术是通过各种传感器对车辆行驶环境进行动态感知和认知,为车辆提供数字化的已知驾驶环境信息,为决策模块提供输入,是实现自动驾驶功能的必要基础。 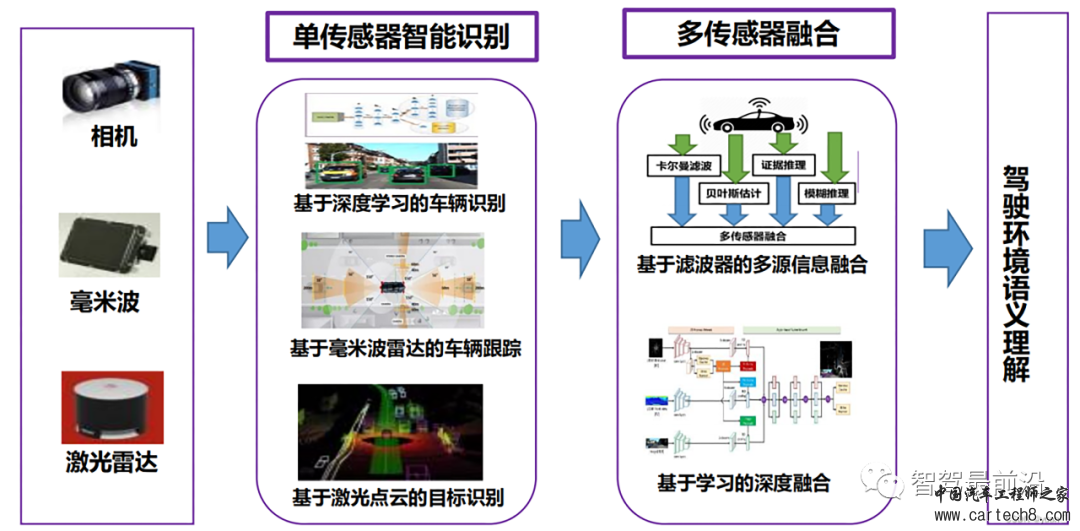 根据感知传感器来源的不同分为自主式环境感知和协同式环境感知。 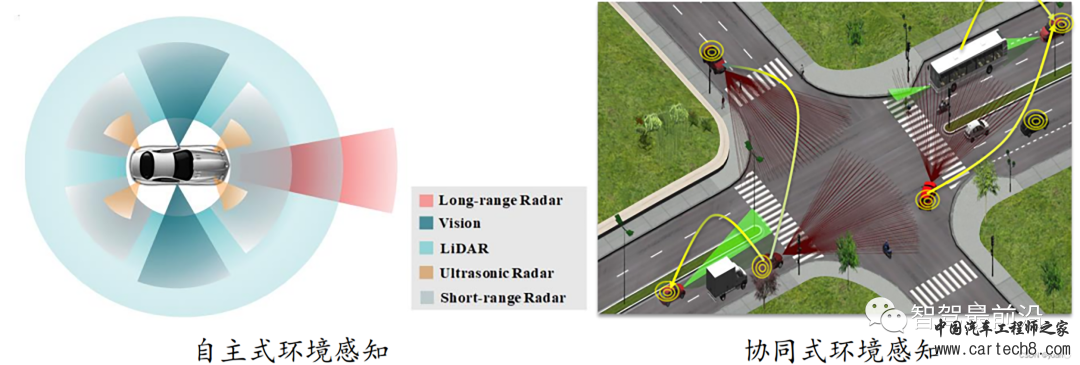 环境感知的对象:智能网联汽车环境感知的对象就是智能传感器检测的对象和V2X通信技术传递信息,主要包括车辆的行驶路径、车辆周围的交道参与者、驾驶状态和驾驶环境等。
 各类传感器介绍
 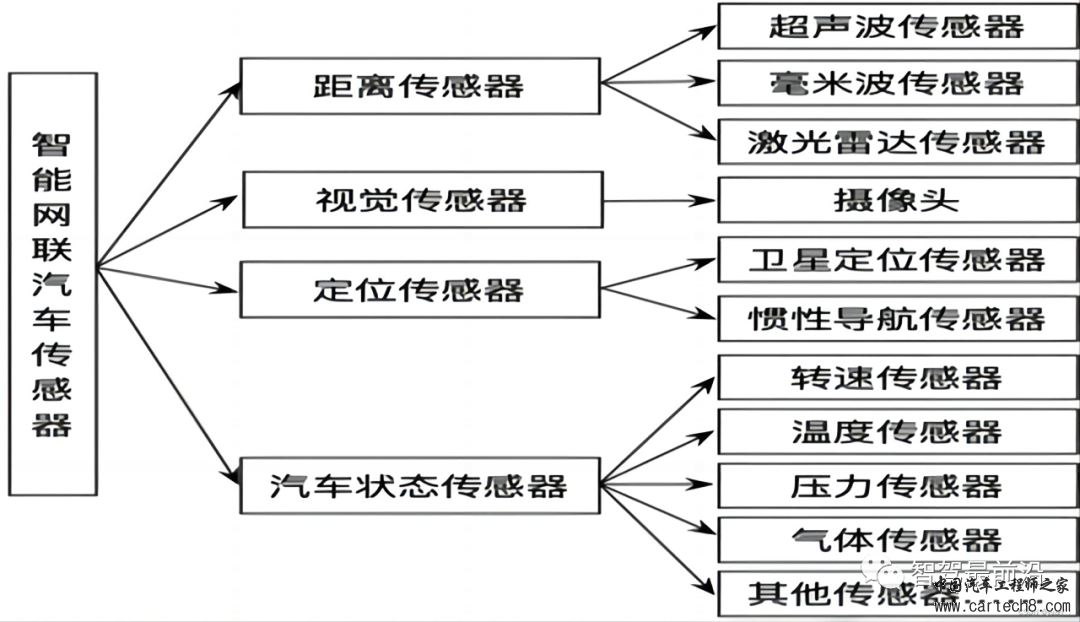 智能网联汽车需要从技术上对环境感知传感器进行判断和选择,筛选主要有以下条件: (1)扫描范围,决定了传感器对被感知的目标做出反应的时间; (2)分辨率,传感器可以为智能网联汽车提供的环境细节; (3)视场角分辨率,决定智能网联汽车需要多少传感器来覆盖感知的区域; (4)感知目标数量,能够区分3D环境中的静态目标和动态目标的数量,并且确定需要跟踪的目标数量; (5)刷新率,决定传感器信息更新的频率; (6)可靠性和准确性,传感器在不同环境条件下的总体可靠性和准确性; (7〉成本、尺寸和软件兼容性,这是环境感知传感器量产的技术条件之一; (8)生成的数据量,它决定了车载计算单元的计算量,现在传感器偏向智能佞感器,不仅仅是感知,还会分辨信息,把对车辆行驶影像最重要的数据传输给车载计算单元,从而减少其计算负荷。  环境感知经典算法概述 摄像头感知算法2D感知算法
3D感知算法 单目算法和双目算法
激光雷达感知算法 点云物体检测
点云语义分割
 自动驾驶仿真软件的功能 5.1 背景介绍 智能交通系统顶级会议IEEE ITSC 2015 主旨演讲(《Technological Relevancy Between Autonomous Driving and Online Game》 自动驾驶与网络游戏的技术关联 Keynote speaker: Prof. Tsuguo Nobe ) 提出以下观点:自动驾驶跟大型网络游戏的技术非常相似。 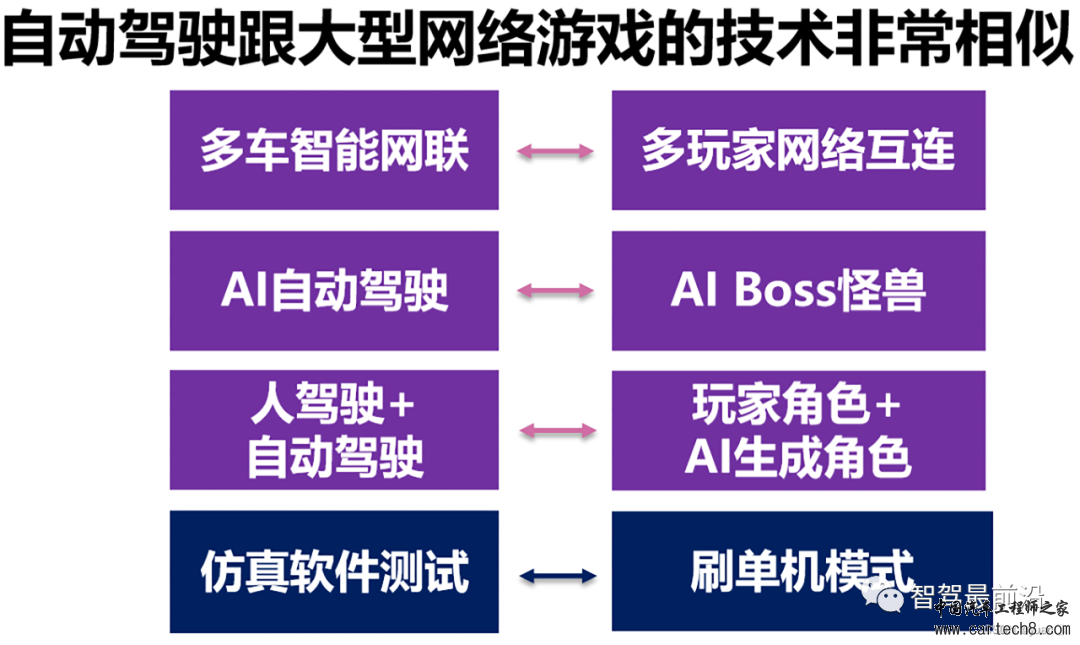 5.2自动驾驶仿真软件平台背后的科学问题 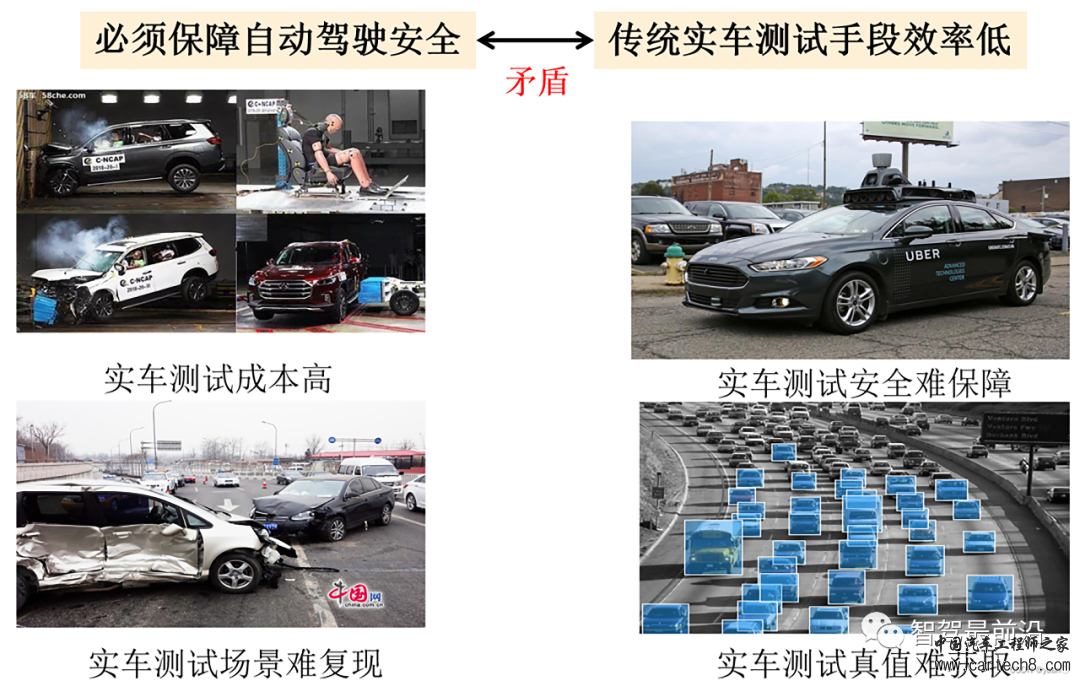 5.3自动驾驶仿真软件的数学本质 自动驾驶仿真软件的数学本质是对道路交通系统进行数学建模。 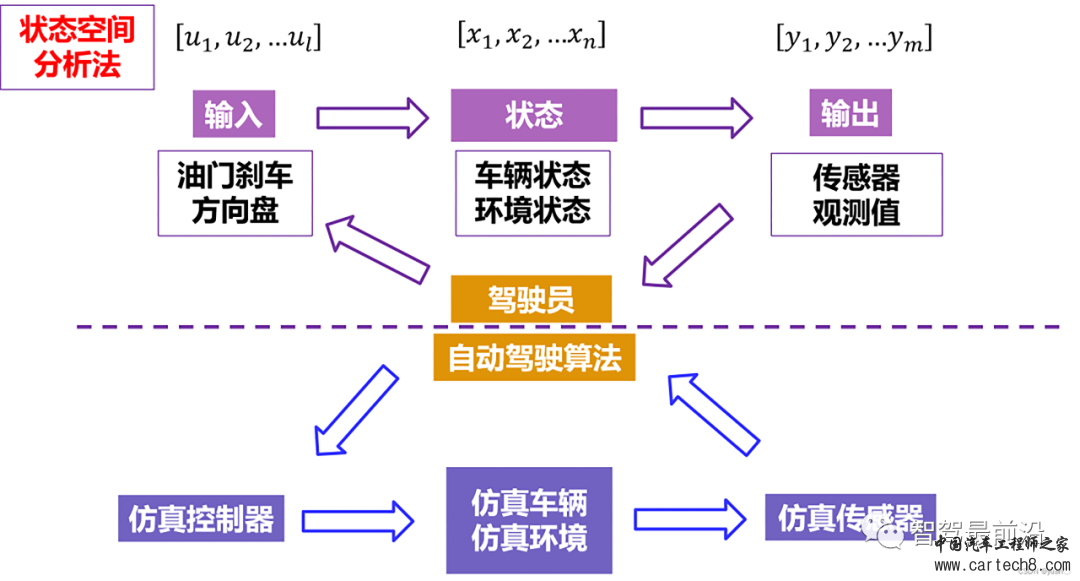 5.4自动驾驶仿真软件发展特点:专业化和协同化 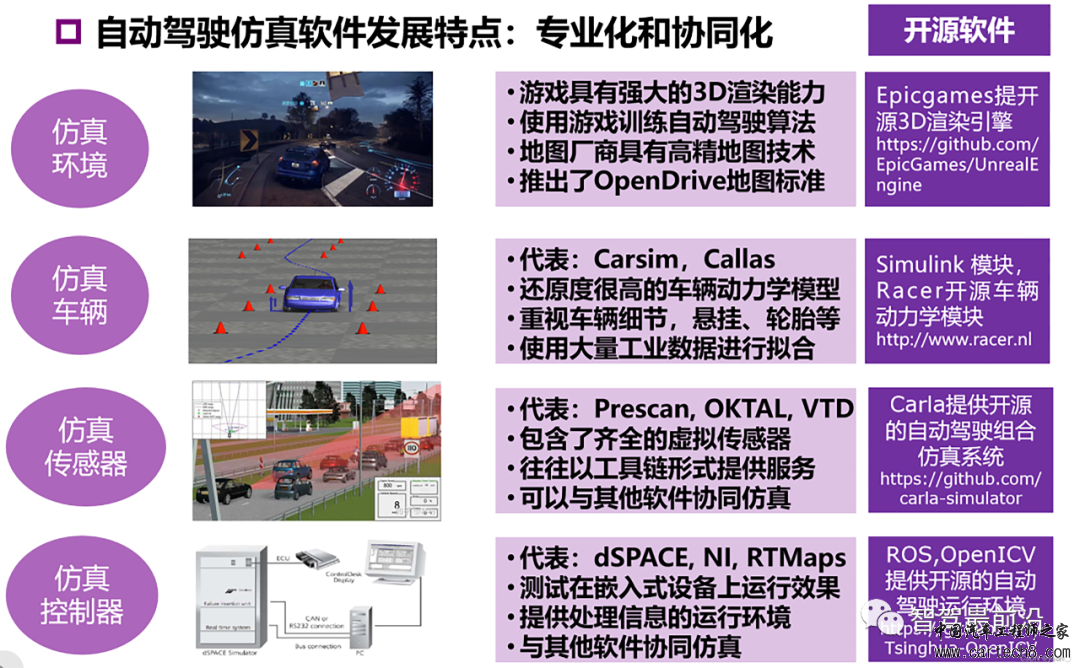 PS1:自动驾驶仿真软件需要对车车之间的交互行为进行模拟; PS2:自动驾驶仿真软件为自动驾驶算法提供训练和测试环境; PS3:高精度地图是仿真软件的重要支撑; PS4:行人、道路的仿真都属于环境仿真模块; -- END -- |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论