汽车主动悬架的单神经元自适应控制
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
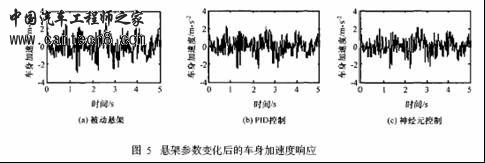
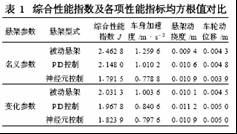
仿真时,先对模型参数取名义值进行验证;然后将悬架参数的车身质量增加20%,同时轮胎刚度下降20%,考察控制器在模型参数变化时的适应能力。以上两种情况着重考察车身加速度响应,见图4及图5;根据悬架系统时域输出仿真数据,计算车身加速度、悬架动挠度、车轮动位移的均方根值及综合性能指数J,如表 1所示。
由图4和表1可知,在名义参数情况下,两种主动悬架都能有效地降低车身加速度,改善平顺性。尽管悬架动挠度有所增大,但车辆的综合性能仍得到了改进。而且,自适应神经元控制下的车轮动位移也有一定程度的改善,其综合减振效果要明显优于PID控制。由图5和表1可见,在悬架参数变化时,两种主动悬架仍然都能减少车身加速度,有效地改善平顺性。自适应神经元控制的减振效果仍然优于PID控制。由此表明:自适应神经元控制能有效地跟随模型参数的变化,将车身加速度控制在一个较好的范围内,降低了参数不确定性对车辆平顺性能的影响;虽然神经元控制的悬架动挠度、车轮动位移相对被动悬架有所增大,但相对PID控制仍有改善,尤其是其综合性能也得到了改进。 五、结论 (1)车辆主动悬架的自适应神经元控制器的仿真结果表明:该控制器能有效地改善车辆的综合性能,尤其是车辆运行的平顺性和舒适性,而且鲁棒性好,对模型参数的变化具有一定的适应性,便于实现和应用。 (2)需要进一步研究控制器对不同路面激励的适应性,以完善主动悬架的性能。 (3)应对控制过程的实用化作深一步的研究,比如考虑作动器的非线性、时滞等因素的影响。 1 0 (请您对文章做出评价) |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。

12




会员评价:
共2条 发表评论发表我的评论