基于ITS车辆行驶安全驾驶辅助系统的研究
以下为文章全文:(本站微信公共账号:cartech8)

汽车零部件采购、销售通信录 填写你的培训需求,我们帮你找 招募汽车专业培训老师
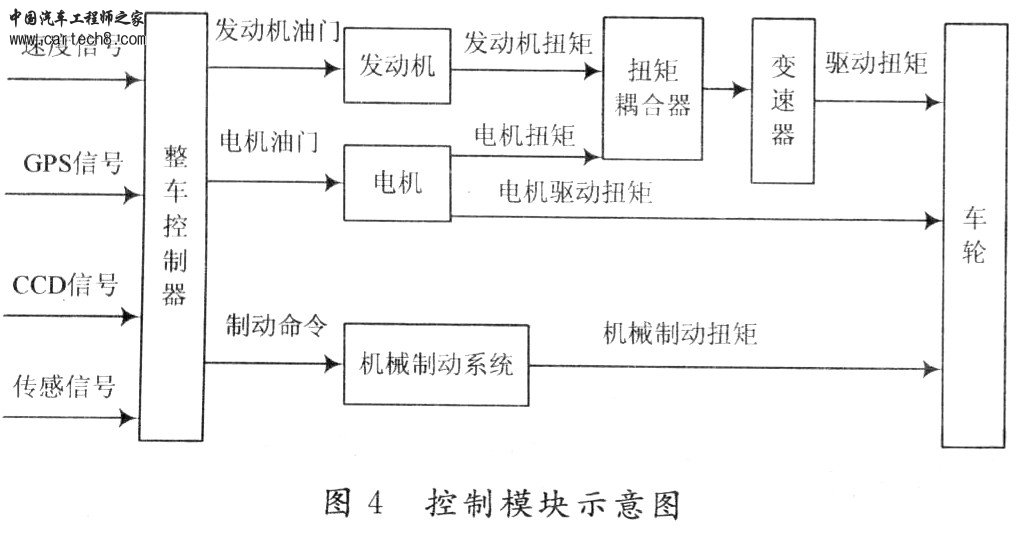
1.2 通信模块 移动Ad Hoc网络由汽车上装载的无线终端相互作用而形成,无需其他有线和无线网络支持。其中,每辆汽车都是移动Ad Hoc网络中的移动节点,而且可以自由地加入或离开网络。移动Ad Hoc网络中没有网络基础设施(如蜂窝网中的基站),所有移动节点分布式运行,具有路由功能,利用一定的协议,使得移动节点自身可以发现和维护其他节点的路由。除适合本驾驶辅助系统的数据信息传输外,还具有一些蜂窝移动网络不具备的优点: (1)可以随时建立网络,在没有其他通信设施的情况下使用,大大节省运营成本; (2)不受固定拓扑结构的限制,具有很强的容错性和鲁棒性,在某些极端恶劣的情况下,即使部分探测汽车出现故障,网络仍能正常运行。 驾驶辅助系统依靠车辆间的状态信息相互传递,监测行车状态,可以保护行车的安全性,包括调节行驶状态,避免恶性碰撞。目前,现有的系统能够警告驾驶者危险状况的来临,但不能自主做出预防措施,而本系统则弥补了这个缺陷。利用Ad Hoc网络传送的信息主要包括两种: (1)定时传输由GPS和CCD相机以及车内部分传感器得到的状态信息,如:车辆的位置、行驶速度、刹车扭矩等。根据研究,这些状态信息应以非常高的频率传递,网络中的每辆车每秒大约传输5~50次。 (2)危险情况的警告信息。与上面定时发送的信息不同,这些警告信息有可能来自通信范围内的通信车辆,节点离得较远,因此需要多跳传输,所以这种信息只有当危险情况出现时才发出。 因此利用移动Ad Hoc网络传输的系统能对车辆行驶状况实施实时动态采集,具有建设成本低、周期短、维护费用低的特点,适合我国智能交通发展的现状。但移动Ad Hoc网络拓扑结构和物理层协议设计、采集信息的处理与其对未来路况预测等问题还有待解决。 1.3 控制模块 通过Ad Hoc网络传递过来的车辆信息进入车内整车控制器时,会对所得到的数据进行分析处理。如果分析的结果安全,不做出任何措施;当分析的结果出现警告时,则做出主动预防措施,其过程如图4所示。
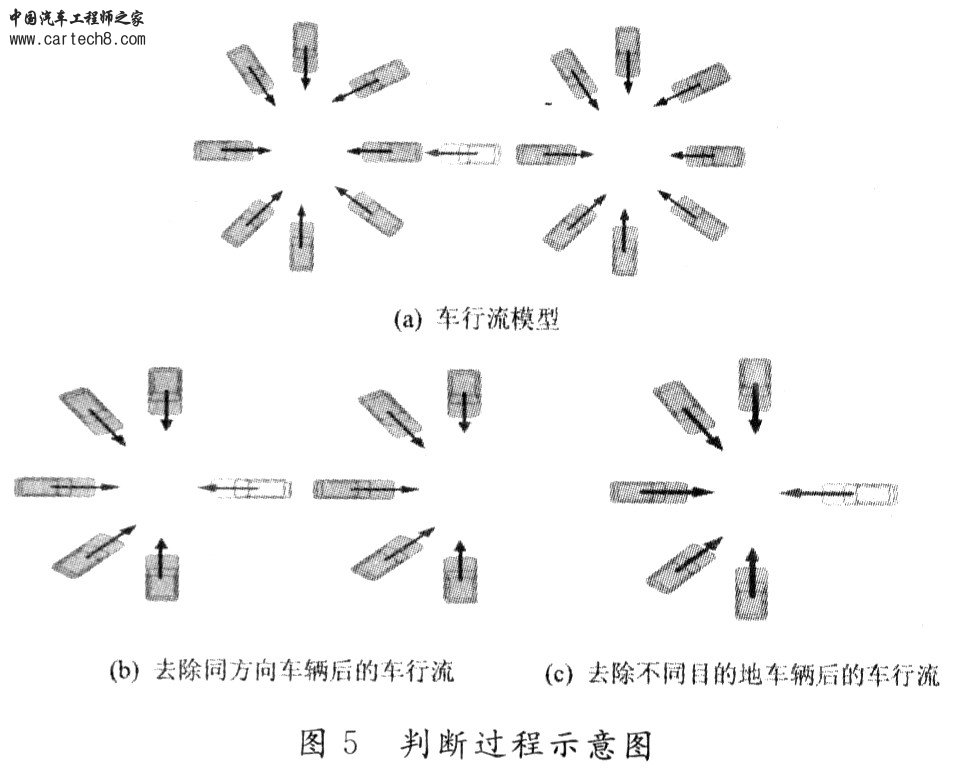
整车控制器是汽车控制的核心,它根据输入信号,判断汽车当前状态,并经过一定的控制逻辑和控制算法的判断分析,确定向各子系统发出当前控制信号的量值。如图4所示,速度信号表征当前整车对输出驱动扭矩的需求量,同理,制动踏板信号表示对整车制动扭矩的需求。本文所研究的汽车控制策略采用的是电力辅助控制策略。发动机MCU根据总成控制器发出的发动机油门信号,结合当前的发动机转速,确定出所需供油量和喷油定时,使电喷发动机通过有效组织燃烧向扭矩耦合器输出扭矩。电机驱动系统根据输入的表征电机扭矩大小的电机油门信号,以及电机工作模式信号决定电机的驱动扭矩输出。 整车控制器根据驾驶员制动踏板及当前车速计算出所需机械制动扭矩值,以得到机械制动系统的制动指令,与原车相比,车轮制动力分别来自产生摩擦制动的制动系统和产生回馈制动的动力传动系统,增加的回馈制动功能由混合动力及传动系统实现,回馈制动力来自电机的制动力矩,并通过传动系统施加于驱动轮上,而回馈制动的能量则通过传动系统传回电机。这样提高了制动的可靠性,从而增加了驾驶辅助系统的可靠性和安全性。 2 车辆定位原理 若要使驾驶辅助系统安全可靠地运行,汽车间重要行驶信息的传递是关键,如何确定与本车进行通信的汽车更是基础。判断过程如图5所示,分为4个步骤。
(1)假设这是一个从四面八方行进的车行流模型(如图5(a)所示); 0 0 (请您对文章做出评价) |
文章网友提供,仅供学习参考,版权为原作者所有,如侵犯到
你的权益请联系542334618@126.com,我们会及时处理。





会员评价:
共0条 发表评论